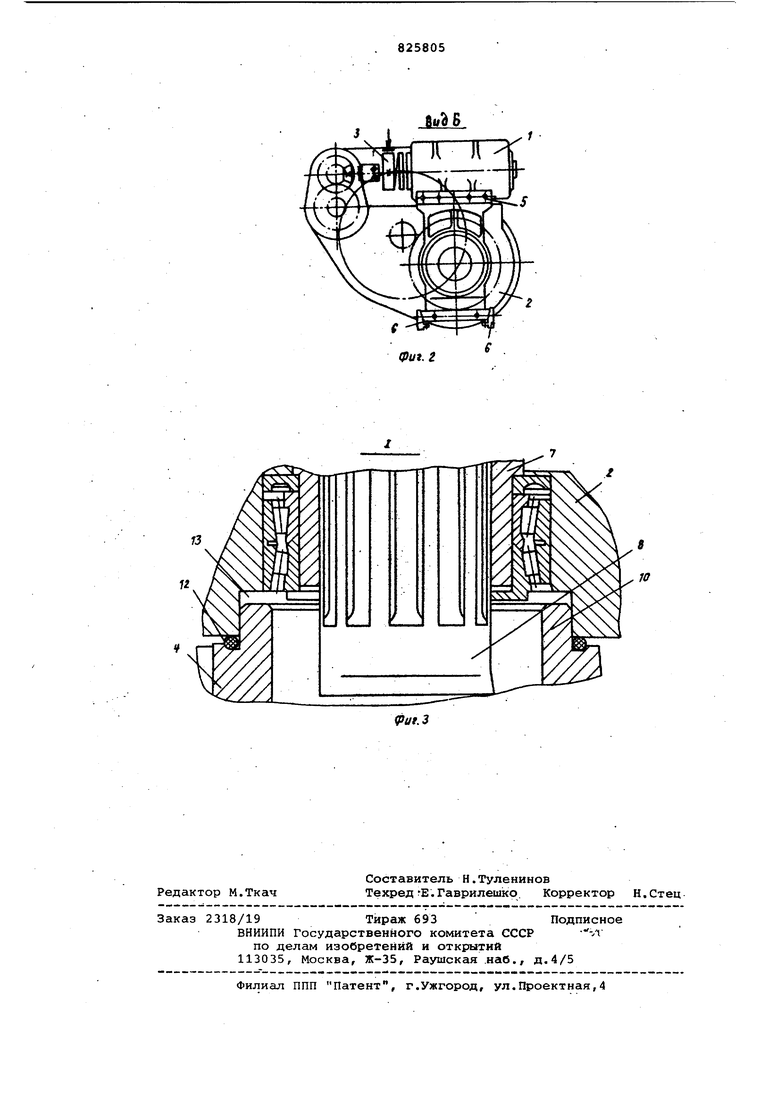
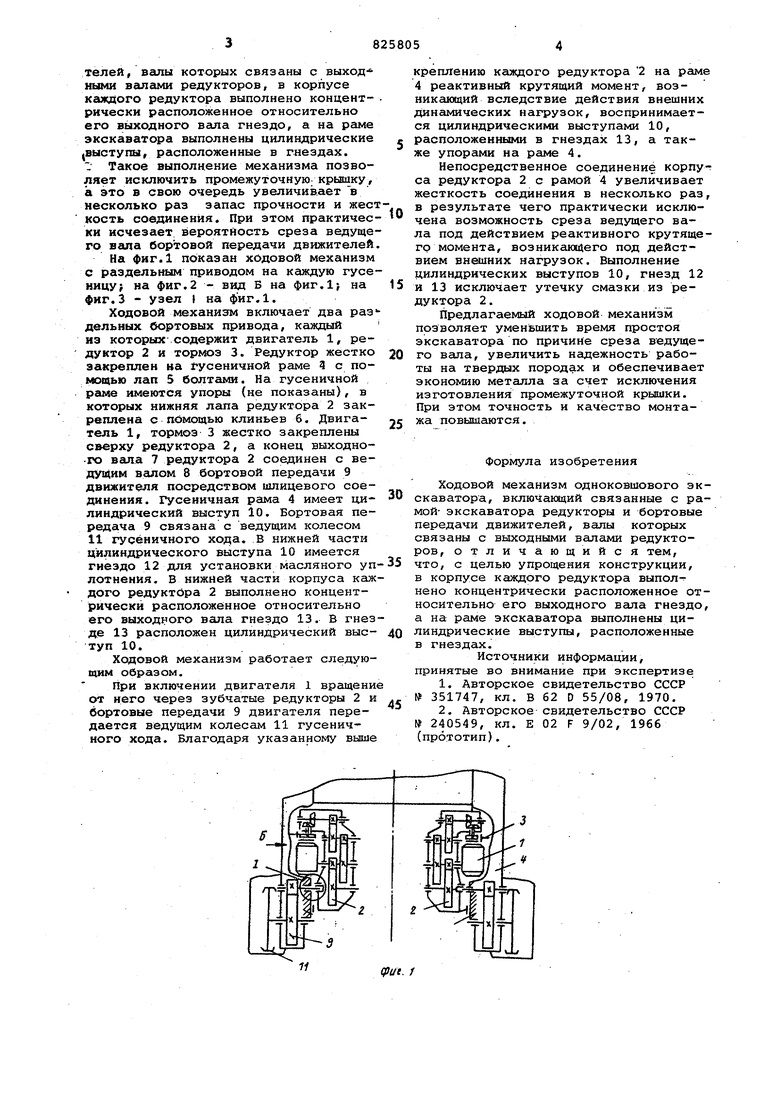
Изо5ретёние относится к ходовым механизмам гусеничных машин с раздельным приводом на каждую гусеницу, установленным на внутренней стороне гусеничной paiuEj, в частности экскаватора. Известен ходовой механизм, включающий привод хода и бортовые передачи движителей flj . Наличие единого привода ухудшает маневренность и ведет к потере мощности двигателя. Наличие большого количества промежуточных .звеньев меж ду выходным валом редуктора и ведущим валом бортовой передачи движителей ведет к снижению надежности работы экскаватора. звестен ходовой механизм одноков шового экскаватора, включающий связанные с рамой экскаватора редукторы и бортовые передачи движителей, валы которых связаны с выходными валами редукторов. Двигатель с тормозом жестко закреплены на редукторе, который в свою очередь прикреплен к гусеничной раме с помощью лап болтами. Для восприятия реактивного .кру тящего момента на гусеничной раме имеются упоры, в которых нижняя ла па редуктора расклинивается при помо щи клиньев. Конец выходного вала редуктора непосредственно соединен с ведущим валом бортовой передачи движителя, а сам редуктор навешен на гусеничную раму с помощью центрирующей крышки, которая имеет бурт, входящий в расточку гусеничной рама-. Крышка крепится к гусеничной с помощью болтов и стопорных шайб Г21 . Однако данная конструкция ме ханизма сравнительно сложна и, кроме того, наличие промежуточной крьаики, прикрепленной болтами к гусеничной Рс1ме, влияет на точность сборки и ведет -к перерасходу металла. Кроме этого,конструкция не обеспечивает требуемой жесткости соединения редуктор-рама и при эксштуатации на карьерах происходят случаи срезания ведущего вала бортовой передачи движителей при движении экскаватора по породе в результате воздействия различных внешних динамических нагрузок. Цель изобретения - упрощение конструкции. Поставленная цель достигается тем, что в ходовом механизме, включающем связанные с рамой экскаватора редукторы и бортовые передачи движителей, валы которых связаны с выходными валами редукторов, в корпусе каждого редуктора выполнено концентрически расположенное относительно его выходного вала гнездо, а на раме экскаватора выполнены цилиндрические выступы, расположенные в гнездах. - Такое выполнение механизма позволяет исключить промежуточную; крьлдку, а это в свою очередь увеличивает в несколько раз запас прочности и жест кость соединения. При этом практичес ки исчезает вероятность среза ведуще го вала бортовой передачи движителей На фиг.1 показан ходовой механизм с раздельным приводом на каждую гусе ницу; на фиг.2 - вид Б на фиг.1 на фиг.З - узел } на фиг.1. Ходовой механиэ м включает два раз дельных бортовых привода, каждый из которых содержит двигатель 1, редуктор 2 и тормоз 3. Редуктор жестко закреплен на гусеничной раме 3 с помощью лап 5 болтами. На гусеничной psaaie имеются упоры {не показаны), в которых нижняя лапа редуктора 2 закреплена с помощью клиньев 6. Двигатель 1, тормоз 3 жестко закреплены сверху редуктора 2, а конец выходно-го вала 7 редуктора 2 соединен с ведУЩим вгшом 8 бортовой передачи 9 движителя посредством шлицевого соединения. Гусеничнёш рама 4 имеет цилиндрический выступ 10. Бортовая передача 9 связана с ведущим колесом 11 гусеничного хода. В нижней части цилиндрического выступа 10 имеется гнездо 12 для установки масляного уп лотнения. В нижней части корпуса каж дого редуктора 2 выполнено концентрически расположе1нное относительно его выходного вала гнездо 13. В гнез де 13 расположен цилиндрический выетуп 10. Ходовой механизм работает следующим образом. При включении двигателя 1 вращени от него через зубчатые редукторы 2 и бортовые передачи 9 двигателя передается ведущим колесам 11 гусеничного хода. Благодаря указанному выше креплению каждого редуктора 2 на раме 4 реактивный крутящий момент, возникающий вследствие действия внешних динамических нагрузок, воспринимается цилиндрическими выступами 10, расположенными в гнездах 13, а также упорами на раме 4. Непосредственное соединение корпут са редуктора 2 с рамой 4 увеличивает жесткость соединения в несколько раз, в результате чего практически исключена возможность среза ведущего вала под действием реактивного крутящего момента, возникающего под действием внииних нагрузок. Выполнение цилиндрических выступов 10, гнезд 12 и 13 исключает утечку смазки из редуктора 2. Предлагаемый ходовой механизм позволяет уменьшить время простоя экскаватора по причине среза ведущего вала, увеличить надежность работы на твердых породах и обеспечивает экономию металла за счет исключения изготовления промежуточной крышки. При этом точность и качество монтажа повышаются. Формула изобретения Кодовой механизм одноковшового экскаватора, включающий связанные с рамой- экскаватора редукторы и бортовые передачи движителей, валы которых связаны с выходными валами редукторов, отличающийся тем, что, с целью упрощения конструкции, в корпусе каждого редуктора выпол нено концентрически расположенное относительно его выходного вала гнездо, а на раме экскаватора выполнены цилиндрические выступы, расположенные в гнездах. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 351747, кл. В 62 D 55/08, 1970. 2.Авторское свидетельство СССР № 240549, кл. Е 02 F 9/02, 1966 (прототип).
(рие. 1
ЙцЗБ
Г
фиг. Z
| название | год | авторы | номер документа |
|---|---|---|---|
| ХОДОВОЙ МЕХАНИЗМ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU240549A1 |
| Ходовой механизм самоходных машин,имеющих раздельный привод | 1981 |
|
SU968229A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЯГОВЫЙ МОДУЛЬ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2545249C1 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2268839C9 |
| ГУСЕНИЧНАЯ ХОДОВАЯ ТЕЛЕЖКА КАРЬЕРНОГО ЭКСКАВАТОРА | 2010 |
|
RU2455429C2 |
| Ходовой механизм одноковшового экскаватора | 1972 |
|
SU443149A1 |
| Транспортное средство со сменным гусеничным движителем | 1990 |
|
SU1750994A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОВОРОТОМ ЛЕСОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1994 |
|
RU2078708C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЯГОВЫЙ МОДУЛЬ ГУСЕНИЧНОЙ МАШИНЫ | 2019 |
|
RU2701084C1 |
| Транспортное средство со сменным гусеничным движителем | 1989 |
|
SU1687498A1 |