1
Изобретение относится к горной промышленности, а именно к дистанционному контролю положения и режима работы горных .машин.
Известно устройство для контроля местонахождения угледобывающей машины, содержащее датчик местонахождения машины в забое и другие элементы Г} .
Известно тйкже устройство для учета времени работы под нагрузкой угледобывающей машины, содержащее датчик нагрузки машины и. другие элементы 2 .
Ни одно из описанных устройств не обеспечивает одновременного контроля местонахождения и учета времени работы под нагрузкой угледобывающей машины.
Известно устройство для контроля местонахождения и учета времени работы под нагрузкой горнодобываквдей машины, содержащее датчик местонахож- дения машины в забое, передатчик, приемно-переДающей блок, приемный блок, шины слозкения, вычитания и импульсов перемещения, блок определения направления движения, реверсивный счетчик, блок аналогового преобразователя, блок регистрации местонахождения и блок ийдикации времени работы.
В этом устройстве датчик местонахождения и передатчик устанавливается непосредственно на угледобывающей машине, высокочастотные сигналы о местонахождении которой передаются на поверхность шахты. Кроме того, на распредпункте во взрывонепроницаемом
0 корпусб установлен датчик режима работы, представляющий собой блок трансформатора тока и пороговый элемент. Трансформатор тока включается в разрыв силовой жилы электрического
5 кабеля, питающего угледобывающую машину. При токе в силовой жиле, соответстэУющем работе м|ашины под нагрузкой , срабатывает пороговый элемент и включает генератор сигналов прием0но-передающего блока. Далее высокочастотсный сигнал поступает по паре проводов телефонного кабеля на приемник сигналов, расположенный на поверхности шахты. Из приемника сигнал по5ступает на блок индикации времени работы горнодобывгиощей машины под нагрузкой СИ
Однакоуказанное устройство отличается значительной сложностью конструкции.
Цель изобретения - упрощениеконтрукции устройства.
Поставленная цель достигается тем, то устройство снабжено схемами И И-НЕ, триггером, реле времени и вумя переключающими схемами, при- г ем шины сложения и импульсов перемеения соединены со входами схемы И, выход которой непосредственно и чгерез первую переключающую схему, подключенную к первому входу триггера, . и триггер соединен с входами схемы И-НЕ,. выход которой подключен к реле времени, соединенному с блоком индикации времени работы и через вторую переключающую схему со вторым входом триггера.
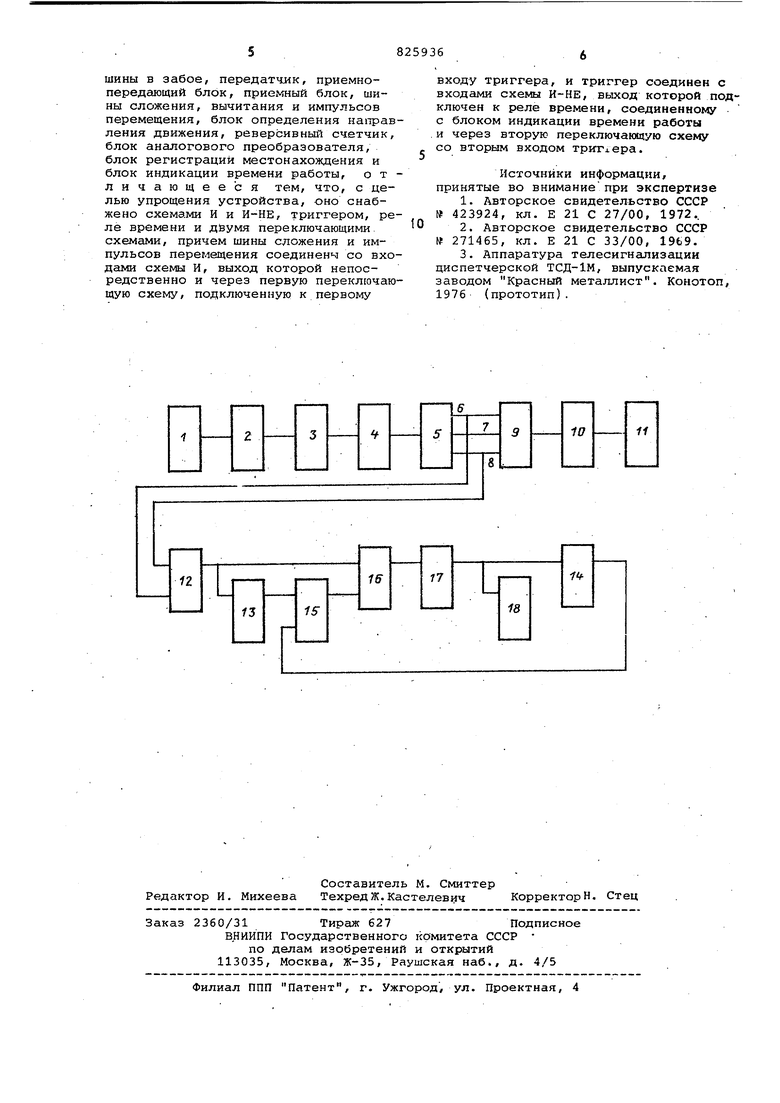
На чертеже представлена блок-схема предлагаемого устройства.
Устройство состоит из датчика 1 месместонахождения горнодобывающей.машины, передатчика 2, приемно-передающе- 20 го блока 3, приемного блока 4, блока 5 определения направления движения, шины б сложения, шины 7 вычитания и шины 8 импульсов-перемещения, реверсивного счетчика 9, блока 10 .аналого- 25 вого преобразователя, блока 11 регистрации местонахождения, схемы 12 И, переключающих схем 13 и 14, триггера. 15, схемы 16 И-НЕ, реле 17 времени и блока 18 индикации времени работы, .,.4
Устройство работает следующим образом.
Датчик 1 местонахождения механически- связан с приводными органами угледобывающей машины и управляет ра- , ботой передатчика 2, который генерирует высокочастотные сигналы при прохождении машиной единицы длины забоя. Высокочастотные сигналы от передатчика ПО- контрольным жилам силового кабеля, питающего угледобывающую 40 машину, поступают на вход приемнопередающеГо блока 3, из которого высокочастотные сигналы по паре проводов телефонного кабеля поступают на вход приемного блока 4, расположенно- 5 го на поверхности шахты. Из приемного блока коды импульсов перемещения горного комбайна поступают на вход блока 5 определения направления движе.ния. При движении машины под нагруз- CQ кой из шины б сложения и шины 8 импульсов перемещения сигналы поступают на первый и третий входы реверсивного счетчика 9 и на первый и второй входысхемы 12 И. При движении машины на холостом ходу, т.е. в обратном направлении, из шины 7 вычитания и шины 8 импульсов перемещения сигналы поступсоот на второй и третий входы реверсивного счетчика 9, а на схему 12 И постуrtaeT сигнал только на пер- 60 вый вход с шины- 8 импульсов перемещения . С выхода реверсивного счетчика 9 сигнал поступает на вход блока 10 аналогового преобразователя, а его выходной сигнсШ поступает на вход 65
блока 11 регистрации местонахождения, который в масштабе регистрирует местонахождение угледобывающей машины в забое.
Если после,работы машины под нагрузкой есть пауза, превышающаявыдержку реле 17 времени, то триггер 15 устанавливается в нулевое положение. После начала работы под нагрузкой горнодобывающей машины из шины б сложения сигнал поступает на второй ВХОД схемы Г2 И, а на первый ее вход из шины 8 импульсов перемещения поступает первый импульс о перемещении машины под нагрузкой. Со схемы 12 И импульс поступает на первый вход схемы 16 И-НЕ, но на ее выходе сигнал не появляется, так кактриггер 15 находится в нулевом-положении. Параллельно со схемы 12 И импульсный сигнал поступает на вход переключающей схемы 13 и своим задним фронтом: устанавливает в единичное положение триггер 15. При поступлении следующего импульса о перемещении машины под нагрузкой на выходе схемы 16 И-НЕ появляется сигна-п, который включает реле 17 времени. С выхода реле 17 времени сигнал поступает на вход блока 18 индикации, который включается и суммирует время работы угледобывающей машины под нагрузкой.
Последующие импульсы о работе машины под нагрузкой поддерживают реле 17 времени и блок 18 индикации включенными. Если после этого угледобывающая машина останавливается, то суммирование времени ее работы прекращается по истечении выдержки реле 17 времени. После остановки машины реле 17 времени отключается и выключает блок 18 индикации. С реле 17 времени сигнал поступает на вход переключающей схемы 14, выходной импульс которой устанавливает триггер 15 в нулевое положение. Если машина двигается в обратном направлении, т.е. на холостом ходу,, то на шине б сложения разрешающий сигнал исчезает и блок 18 индикации не включается. При этом реверсивный счетчик 9 и аналоговый преобразователь 10 по мере продвижения маш11ны на холостом ходу соответственно уменьшают показания блока 11 регистрации местонахождения .
Предлагаемое техническое решение упрощает конструкцию устройства, снижает его стоимость и трудоемкость монтажа в шахтных условиях.
Формула изобретения
Устройство для контроля местонахождения и учета времени работы под нагрузкой угледобывающей машины, содержащее датчик местонахождения машины в забое, передатчик, прие.мнопередающий блок, приемный блок, шины сложения, вычитания и импульсов перемещения, блок определения направления движения, реверсивный счетчик, блок аналогового преобразователя, блок регистрации местонахождения и блок индикации времени работы, отличающееся тем, что, с целью упрощения устройства, оно снабжено схемами И и И-НЕ, триггером, реле времени и двумя переключающими схемами, причем шины сложения и импульсов перемещения соединены со входами схемы И, выход которой непосредственно и через первую переключающую схему, подключенную к первому
входу триггера, и триггер соединен с входами схемы И-НЕ, выход которой подключен к реле времени, соединенному с блоком индикации времени работы и через вторую переключающую схему со вторым входом триггера.
Источники информации, принятые во вниманиепри экспертизе
1.Авторское свидетельство СССР № 423924, кл. Е 21 С 27/00, 1972..
2.Авторское свидетельство СССР № 271465, кл. Е 21 С 33/00, 1969.
3.Аппаратура телесигнализации диспетчерской ТСД-1М, выпускаемая заводом Красный металлист. Конотоп, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дискретного контроля местонахождения в лаве исполнительного органа струга и устройство для его осуществления | 1986 |
|
SU1382949A1 |
| Устройство для контроля положения объектов в очистном забое | 1989 |
|
SU1700231A1 |
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ ПО ПРОВОДНЫМ ЛИНИЯМ СВЯЗИ | 1967 |
|
SU215063A1 |
| Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата | 1983 |
|
SU1120111A1 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ УГЛЕДОБЫВАЮЩИХ МАШИН | 1971 |
|
SU306259A1 |
| Регулятор постоянного тока для измерения тока срабатывания защиты стабилизаторов напряжения | 1982 |
|
SU1051522A1 |
| Устройство автоматического управления системой пылеподавления струговой установки | 1982 |
|
SU1092281A1 |
| Способ автоматического управления выдвижкой секций базы угледобывающего агрегата и устройство для его осуществления | 1982 |
|
SU1052670A1 |
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ | 1993 |
|
RU2092903C1 |
| Устройство для программного управленияпОТОКОМ жидКОСТи | 1979 |
|
SU800966A1 |
2
12
15
13
10
И
ff
17
18
