2. Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата, содержащее датчик режима работы агрегата, пульт управления, включающий формирователь временных интервалов, дешифратор, генератор, выход которого соединен с первым входом трехвходовой схемы совпадения, к выходу которой подключен первый вход счетчика, и соединенные с пультом управления при помощи магистраль ной линии связи управляющие блоки., каждый из которых состоит из электрогидроклапана к датчика перемещения секций базы, соединенного со счетчиком пути, отличающееся тем, что оно снабжено датчиком нагрузки агрегата и датчиком перемещения струга, пульт управления снабжен двумя пороговыми эле иентами, логической схемой «Эквивалентность, второй трехвходовой схемой совпадения, трехфазным триггером и двухвходовой схемой совпадения, каждый управляющий блок дополнительно снабжен схемой И, вход которой соединен с выходом счетчика пути, выход каждой схемы И соединен с электрогидроклапаном, причем датчик нагрузки агрегата соединен с входами пороговых элементов пульта управления, единичный выход первого из которых соединен с вторым входом первой трехвходовой схемы совпадения, а нулевой выход подключен к первому входу логической схемы «Эквивалентность, к второму входу которой подключен выход второго порогового элемента.
нулевой выход которого-соединен с вторым входом второй трехвходовой схемы совпадения, выход последней соединен с вычитающим входом счетчика, суммирующий вход которого соединен с выходом первой трехвходовой схемы совпадения, а вход установки на нуль соединен с выходом логической схемы «Эквивалентность, выход счетчика соединен с входом дещифратора, а выходы дещифратора соединены с входами трехфазного триггера, один из выходов которого соединен с третьим входом второй трехвходовой схемы совпадения, второй выход трехфазного триггера соединен с первым входом двухвходовой схемы совпадения и с третьим входом первой трехвходовой схемы совпадения, третий выход триггера соединен с управляющим входом формирователя временных интервалов, к информационному входу которого подключен датчик перемещения струга, а к входу установки на нуль подключен датчик режима работы агрегата, к которому также подключен второй вход двухвходовой схемы совпадения, а ее выход через магистральную линию связи соединен с входом схем И в управляющих блоках, при этом первый вход второй трехвходовой схемы совпадения соединен с выходом генератора, а выход формирователя временных интервалов через магистральную линию связи соединен с входом установки на нуль счетчика пути каждого управляющего блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата | 1983 |
|
SU1120111A1 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1980 |
|
SU935628A2 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1981 |
|
SU1010284A1 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1981 |
|
SU968454A1 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1981 |
|
SU956805A2 |
| Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата | 1986 |
|
SU1382976A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1973 |
|
SU459757A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1974 |
|
SU600304A1 |
| Устройство для компенсации реактивной мощности | 1990 |
|
SU1746463A1 |
| Устройство для контроля и учета работы добычного роторного экскаватора | 1983 |
|
SU1145089A1 |
1. Способ автоматического управления ВЫДВИЖКОЙ секций базы угледобывающего агрегата, основанный на синхронизации скоростей раздвижки гидродомкратов, передвижки секций базы за счет поддержания равенства рабочей жидкости, поступающей из напорной магистрали в поршневые полости гидродомкратов, отличающийся тем, что, с целью повышения эффективности управления для использования мошности привода добычной машины угледобываюшего агрегата, дополнительно непрерывно измеряют скорость движения кареток добычной машины и нагрузку на ее приводе и выдвижку секций базы агрегата осуществляют со скоростью, определяемой соотношением a-V«4t) Vb.c.(t) I.K (t)(О где WCKopocTb выдвижки секций базы агрегата, м/с, (Л а -величина стружки разрушаемого угля для каждой каретки, м; Vn(t)-cKOpocTb движения кареток добычной машины, м/с; -расстояние между каретками, м; К(и-коэффициент загрузки привода добычной машины. о СП IsD О5 vl О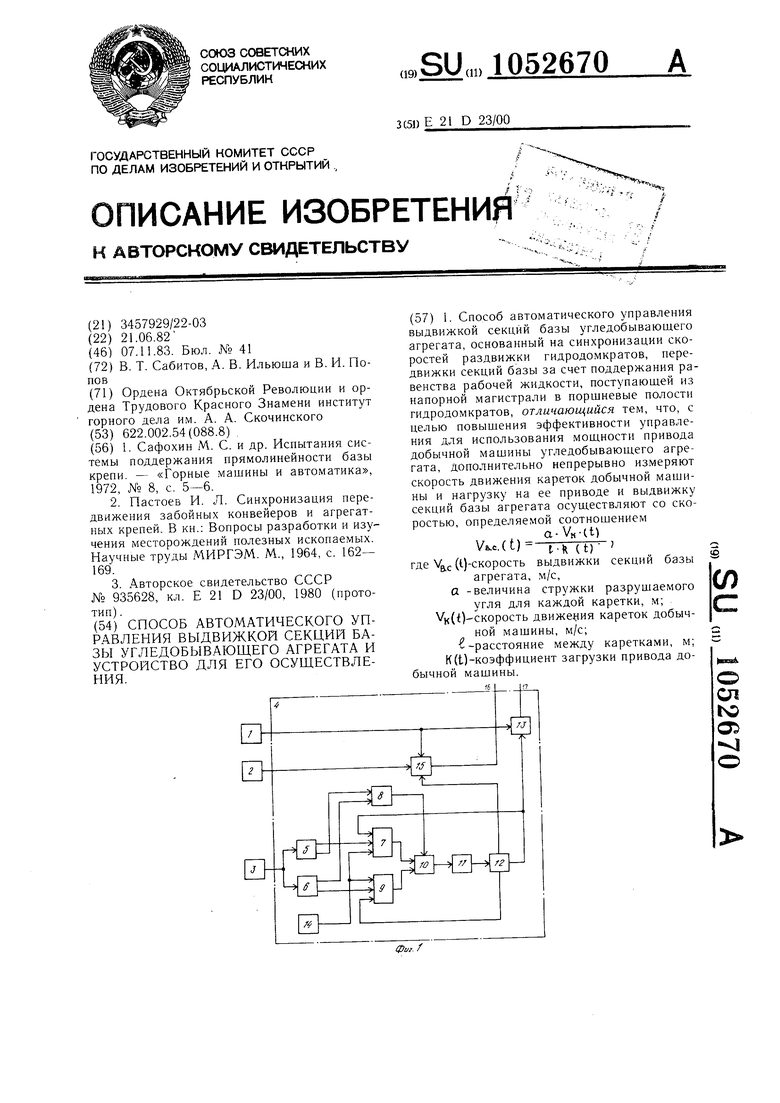
1
Изобретение относится к автоматизации управления угледобывающими комплексами и агрегатами, а именно к способам и устройствам автоматического управления скоростью выдвижки секций базы угледобывающего агрегата фронтального действия.
Известен способ синхронизации передвижки секций базы агрегата, основанный на обеспечении постоянной скорости раздвижки гидродомкратов передвижки секций базы за счет поддержания равенства потоков рабочей жидкости, вытесняемой из щтоковых полостей гидродомкратов.
Устройство для осуществления указанного способа включает делитель потока, обратные клапаны, фильтры, гидрораспределители и магистральные трубопроводы 1.
Известные способ и устройство обладают низкой надежностью и точностью управления.
Известен способ автоматического управления скоростью выдвижки секций базы угледобывающего агрегата, основанный на
синхронизации скоростей раздвижки гидродомкратоБ передвижки секций базы за счет поддержания равенства потоков рабочей жидкости, поступающей из напорной магистрали в гторщневые полости гилродомкратов 2.
Известно устройство для автоматического управления скоростью выдвкжки секций базы угледобываюо;его агрегата,, пульт управления, включающий формирователь
.временных интервалов, дещифратор, генератор, выход которого соединен с первым входом трехвходовой схемы совпадений, к выходу которой подключен первый вход счетчика, и соединенные с пультом управления при помощи магистральной линии
связи управляющие блоки, каждый из которых состоит из электрогидроклапана и датчика перемещения секций базы, соединенного со счетчиком пути 3.
Недостатком устройства является то, что управление скоростью выдвижки секций базы осуществляется по жесткой программе, что не позволяет корректировать величину задаваемой скорости в процессе
подачи секций базы агрегата на забой и эффективно использовать мощность привода добычной машины угледобывающего агрегата,.
Для эффективной работы угледобывающего агрегата фронтального действия необходимо синхронизировать скорости выдвижки секций базы агрегата между собой, а также со скоростью движения кареток добычной мащины, что позволит поддерживать постоянной величину стружки разрущаемого угля для всех кареток добычной мащины, а значит, стабилизируется нагрузка на привод добычной мащины. Кроме этого, необходимо управлять скоростью выдвижки секций базы агрегата в зависимости от величины нагрузки на приводе добычной мащины.
Цель изобретения - повышение эффективности управления для использования мощности привода добычной мащины угледобывающего агрегата.
Указанная цель достигается тем, что согласно способу автоматического управления выдвижкой секций базы угледобывающего агрегата, основанному на синхронизации скоростей раздвижки гидродомкратов, передвижки секций базы за счет поддержания равенства потоков рабочей жидкости, поступающей из напорной магистрали в порщневые полости гидродомкратов, дополнительно непрерывно измеряют скорость движения кареток добычной мащины и нагрузку на ее приводе и выдвижку секций базы агрегата осуществляют со скоростью определяемой соотношением
у„ (t) A-.VitCtJ
ВС l-K(i)
где VB.C (t) -скорость выдвижки- секций базы агрегата, м/с;
Л -величина стружки разрущаемого угля для каждой каретки, м;
VfiCi)- скорость движения кареток добычной мащины, м/с: -расстояние между каретками,M К({)-коэффициент загрузки привода добычной мащины. Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата, содержащее датчик режима работы агрегата, пульт управления, включающий формирователь временных интервалов, дешифратор, генератор, выход которого соединен с первым входом трехвходовой смены совпадения, к выходу которой подключен первый вход счетчика, и соединенные е пультом управления при помощи магистральной линии связи управляющие блоки, каждый из которых состоит из электрогидроклапана и датчика перемещения секций базы, соединенного со счетчиком пути, снабжено датчиком нагрузки агрегата и датчиком перемещения струга, пульт управления снабжен двумя пороговыми элементами, логической схемой «эквивалентность, второй трехвходовой схемой совпадений, трехфазным триггером и двухвходовой схемой совпадения, каждый управляющий блок дополнительно снабжен схемой И, вход которой соединен с выходом счетчика пути, а выход каждой схемы И соединен с электрогидроJ клапаном, причем датчик нагрузки агрегата соединен с входами пороговых элементов пульта управления, единичный выход первого из которых соединен с вторым вхо- дом первой трехвходовой схемы совпадения, а нулевой выход подключен к первому входу
0 логической схемы «Эквивалентность, к второму входу которой подключен единичный выход второго порогового элемента, нулевой выход которого соединен с вторым входом второй трехвходовой схемы совпадения, выход последней соединен с вычитающим
5 входом счетчика, суммирующий вход которого соединен с выходом первой трехвходовой схемы совпадения, а вход установки на нуль соединен с выходом логической схемы «Эквивалентность, выход счетчика соединен с входом дешифратора, а выходы де0 шифратора соединены с входами трехфаз- , ного триггера, один из выходов которого соединен с третьим входом второй трехвходовой схемы совпадения, второй выход трехфазного триггера соединен с первым входом двухвходовой схемы совпадения и
5 с третьим входом первой трехвходовой схемы совпадения, третий выход триггера соединен с управляющим входом формирователя временных интервалов, к информационному входу которого подключен датчик перемещения струга, а ко входу установки на нуль
0 подключен датчик режима работы агрегата, к которому также подключен второй вход двухвходовой схемы совпадения, а ее выход через магистральную линию связи соединен с входом схем И в управляющих блоках, при этом первый вход второй трехвходовой схемы совпадения соединен с выходом генератора, а выход формирователя временных интервалов через магистральную линию связи соединен с входом установки на нуль счетчика пути
0 каждого управляющего блока.
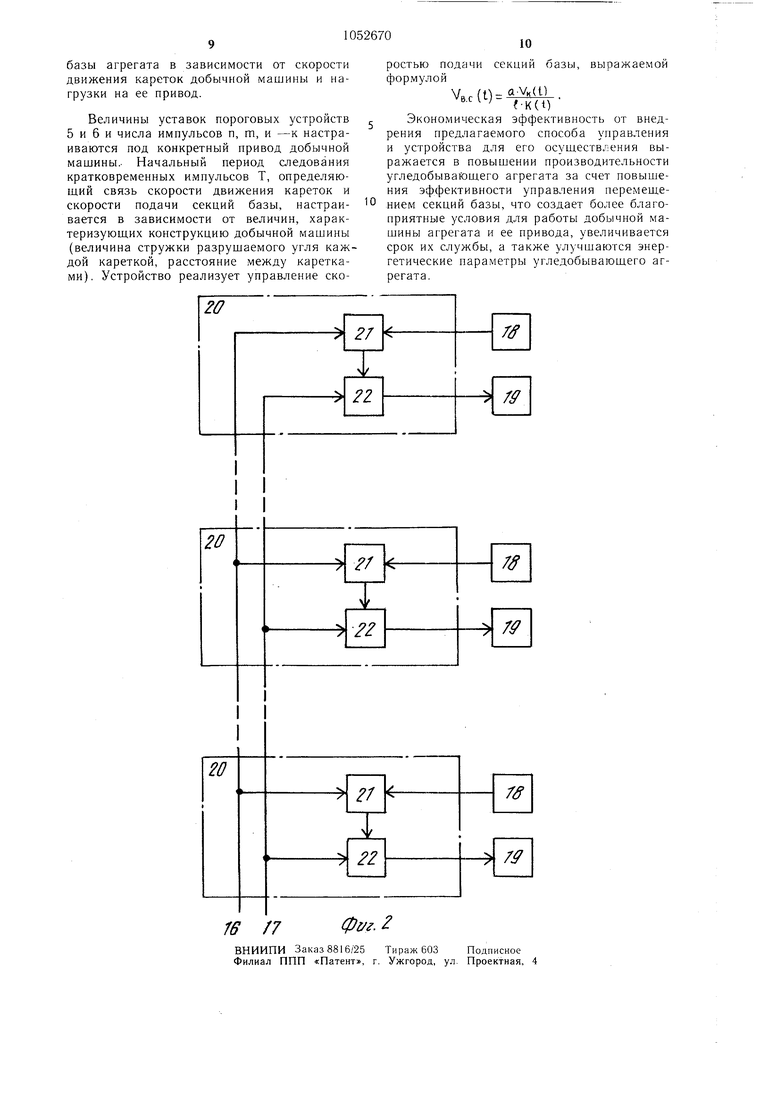
На фиг. 1 изображена функциональная схема пульта управления с датчиками; на фиг. 2 - функциональная схема управляющих блоков.
Устройство (фиг. 1) содержит датчик 1
5 режима работы, датчик 2 перемещения струга, датчик 3 нагрузки агрегата и пульт 4 управления. Датчик 3 нагрузки подключен к входам первого 5 и второго 6 пороговых элементов. Единичный выход первого порогового элемента 5 соединен с вторым вхоQ дом первой трехвходовой схемы 7 совпадения, ,а нулевой выход соединен с первым входом логической схемы 8 «Эквивалентность ; второй вход которой соединен с единичным выходом второго порогового элемента 6. Нулевой выход второго порогового элемен5 та 6 соединен с вторым входом второй трехвходовой схемы 9 совпадения. Выходы первой 7 и второй 9 трехвходовых схем совпадения соединены соответственно с суму1ирую1цим и вычитающим входами реверсивного счетчика 10, вход установки на нуль которого соединен с выходом логической схемы, 8 «Эквивалентность. Выходы реверсивного счетчика 10 соединены с входами дешифратора 11, а выходы дешифратора 11 соединены с входами трехфазного триггера 12. Первый выход трехфазного триггера 12 соединен с третьим входом второй трехвходовой схемы 9 совпадения. Второй еяход трехфазного триггера 12 соединен с первы.м входом двухвходовой схемы 13сов 1адения и с третьим входом первой трехвходовой схемы 7 совпадения. Первые входы первой 7 и второй 9 трехвходовых схем совпадения соединены с выходом генератора 14. Третий выход трехфазного трр ггера 12 соединен с управляющим входом управляемого формирователя 15 временных интервалов, информационный вход которого подключен к датчику 2 перемещения кареток, а вход установки на нуль подключен к выходу датчика 1 режима работы, к которому также подключен второй вход двухвходовой схемы 13 совпадения. Выход управляемого формирователя 15 временных интервалов соединен с магистральной линией 16 связи, а выход двухвходовой схемы 13 совпадения с магистральной линией 17 связи. Аппаратура, размещаемая на агрегате в лаве (управляющие блоки, фиг. 2), содержит датчики перемещения секций базы 18, электрогидроклапаны 19 и управляющие блоки 20. Датчики перемещения секций базы 18 подсоединены в соответствующих им управляющих блоках 20 к информационным входам счетчиков пути 21, выходы установки на ноль которых соединены с магистральной линией связи 16. Один из выходов счетчика 21 пути каждого управляющего блока 20 соединен с одним из входов логической схемы И 22. Вторые входы логических схем И 22 всех управляющих блоков 20 соединены с магист ральной линией 17 связи, а их выходы соединены с соответствующим им электрогидроклапанами 19. Способ с помощью устройства осуществляется следующим образом. При статическом состоянии агрегата датчик 1 режима работы своим сигналом удерживает в нулевом состоянии управляемый формирователь 15 временных интер валов, а также через двухвходовую схему 13 совпадения, магистральную линию 17 связи и логические схемы И 22 удерживает в закрытом состоянии все электрогидроклапаны 19. Управляемый формирователь 15 временных интервалов своим сигналом через магистральную линию 16 связи удерживает в нулевом состоянии все счетчики 21 пути. После запуска привода добычной машины и включения гидросистемы на подачу базы датчик 1 режима работы своим сигналом растормаживает управляемый формирователь 15 временных интервалов и через двухвходовую схему 13 совпадения,, магист ральную линию 17 связи и логические схемы И 22 открывает все электрО1идрок,,:1апаны 19. Секции базы начинают перемеп ать сЯ на забой. Датчик 2 перемещения струга (кареток) формирует импульсы, пропорциональные скорости движения кареток добычной машины. Обрабатывая эту инфор,мацию, управляемый формирователь 15 временных интервалов формирует кратковременные и,мпульсы с периодом Т, пропорциональны, скорости движения кареток. Величину пропорциональности задает трехфазный т)иггер 12. Кратковре,1енные импульсы сбрасывают в нулевое состояние счетчики 21 пути всех управляющих блоков 20, Датчики перемещ.ения секций базы 18 формируют импульсы, пропорциональные пройденному пути, которые суммируют соответствующие им счетчики 21 пути. Если какие-то счетчики 21 иу1и vciieBaют просчитать заданное количество и.чпу.тьсов до истечения периода Т, то они своими схемы И 22 сигналами через логические закрывают соответствуюшие им электрогидроклананы 19. Секции базы останавли зают СП. По истечении периода Т счетчики 21 пути сбрасываются в нуль и закрьгвшиеся электрогидроклапаны 19 открываются. Таким образом осушествляется синхронизация скоростей движения кареток добычной машины и всех секций базы arpei-ava, Датчик 3 нагрузки привода ,д()бычи(,м машины измеряет нагрузку, кoтop ю фиксируют два пороговых элемента 5 и 6, Первый пороговый элег 1ент 5 настроек на зсличину нагрузки, превышающую номинальну,ю, а второй пороговый элемент 6 настроен на нагрузку, меньшую номинальной. Дешифратор 11 настроен на три числа п, ш()и-к. При номинальной нагрузке перв,ь;й пороговый элемент 5 находится в нулегзо,ч состоянии, а второй пороговый элемент 5 Б единичном состоянии. Свои,ми сигналами пороговые эле.менты 5 и 6 удерживают ъ запертом состоянии обе трехвходовые схемы 7 и 9 совпадения, а также через „логическую схему 8 „«Эквивалентность удерживают в нулевом состоянии реверсинньж счетчик 10. Трехфазный триггер 12 устап лпен в первом состоянии и СРАМИМИ си jiia;ia,-v;H поддерживает зависимость периода c.ie.aoвания кратковременных и,мпул1 сов Т от числа импульсов, формируе,1ых датчиком пере.1ещения кареток 2, соответствуюгцую номинальной нагрузке, а также поддерживает в заперто,м состоянии вторую- трехвходовую схему 9 совпадения. При превь(П е11ии нагрузки па привод ,ц(,., бычной ,маи1ины уровня первого nopoiOBoro элемента 5, последний срабатывае и своим сигналом через логическую схему 8 «Эквивалентность растор,1аживает реверсивный счетчик 10 п отпирает трехвходовую схему 7 совпадения. Реверсивный счетчик 10 начинает суммировать импульсы, поступающие от генератора 14 через первую трехвходовую схему 7 совпадения. Если нагрузка на привод снижается ниже уровня настройки первого порогового элемента 5, а реверсивный счетчик 10 не просчит-ал п импульсов,то он опять сбрасывается в нулевое состояние сигналом первого порогового элемента 5, а также запирается первая трехвходовая схема 7 совпадения. Если же реверсивный счетчик 10 просчитал п импульсов, что фиксирует дешифратор 11, то трехфазный триггер 12 устанавливается во второе состояние и своим сигналом управляет управляемым формирователем 15 временных интервалов, который увеличивает длительность периода следования кратковременных импульсов Т, тем самым, снижается скорость движения секций базы на забой, а значит снижается и нагрузка на привод добычной машины.
При снижении нагрузки ниже уровня настройки первого порогового элемента 5 реверсивный счетчик 10 затормаживается в нулевом состоянии, запирается первая трехвходовая схема 7 совпадения, а трехфазный триггер остается во втором состоянии, т. е. секции базы перемещаются на забой с пониженной скоростью. Если нагрузка на привод снижается ниже уровня настройки второго порогового элемента 6, то последний срабатывает и своим сигналом через логическую схему 8 «Эквивалентность растормаживает реверсивный счетчик 10 и отпирает вторую трехвходовую схему 9 совпадения, через которую начинают прохо дить импульсы от генератора 14 на вычитающий вход реверсивного счетчика 10. Если нагрузка возрастает до номинальной, а реверсивный счетчик не просчитает - к импульсов, то реверсивный счетчик 10 затормаживается в нулевом состоянии и запирается вторая трехвходовая схема 9 совпадения. Секции базы продолжают движение на пониженной скорости. Если же реверсивный счетчик 10 просчитает -к импульсов, то дешифратор 11 своим сигналом установит трехфазный триггер 12 в первое состояние. Трехфазный триггер 12 своим сигналом запирает вторую трехвходовую схему 9 совпадения, а также управляет управляемым формирователем 15. временных интервалов, уменьщая период следования кратковременных импульсов Т, вследствие чего увеличивается скорость движения секций базы на забой.
При увеличении нагрузки до номинальной величины затормаживается в нулевом состоянии реверсивный счетчик 10 и поддерживается запертое положение второй/трехвходовой схемы 9 совпадения.
При превышении нагрузки ве.лимшы настройки первого порогового элемента 5 реверсивный счетчик 10 начинает суммировать импульсы, поступающие от генератора 14. При просчете п импульсов дешифратор 11 устанавливает трехфазный триггер 12 во второе состояние, что приводит к снижению, скорости подачи секций базы. Если же и снижение скорости подачи секций базы не приводит к снижению нагрузки до номинальной величины, то при просчете реверсивным счетчиком 10 ш импульсов дешифратор 11 своим сигналом устанавливает трехфазный триггер 12 в третье состояние, который своим сигналом запирает первую трехвходовую
схему 7 совпадения, а также через двухвходовую схему 13 совпадения, магистральную линию 17 связи и логические схемы И 22 закрывает все электрогидроклапаны 19. Движение секций базы на забой прекращается, а добычная мацгина продолжает свою
работу. В результате этого снижается нагрузка на привод добычной машины. При снижении нагрузки до номинальной величины реверсивный счетчик 10 затормаживается в нулевом состоянии и поддерживается запертое состояние первой трехвходовой схемы 7 совпадения. Движение секций базы возобновится только после того, как нагрузка на приводе добычной машины снизится ниже уровня настройки второго порогового элемента 6, а реверсивный счетчик 10 просчитает - к импульсов. Дешифратор 11 установит в первое состояние трехфазный триггер 12, вследствие чего последний своим сигналом через двухвходовую схему 13 совпадения, магистральную линию 17 связи и логические схемы И 22 откроет все электрогидроклапаны 19. Секции базы продолжат свое движение на забой.
Таким образом осушествляется регулирование скорости подачи секций базы на забой в зависимости от нагрузки на привод добычной машины.
При завершении цикла подачи включает ся привод добычной машины и отключается гидросистема подачи базы, вследствие чего
датчик 1 режима работы своим сигналом через двухвходовую схему 13 совпадения, магистральную линию 17 связи и логические схемы И 22 всех управляющих устройств 20 закрывает электрогидроклапаны 19. Секции базы агрегата останавливаются. Кроме того, затормаживается в нулевол состоянии управляемый формирователь 15 временных 1нтервалов и счетчики 21 пути всех г . ляющих устройств 20. Устройство г ,о1-1 следующему цик.1у подачи базы.
Таким o6pajr ., тройство осуществляет регулирование с. рости подачи секций
базы агрегата в зависимости от скорости движения кареток добычной машины и нагрузки на ее привод.
Величины уставок пороговых устройств 5 и 6 и числа импульсов п, т, и -к настраиваются под конкретный привод добычной машины.. Начальный период следования кратковременных импульсов Т, определяюший связь скорости движения кареток и скорости подачи секций базы, настраивается в зависимости от величин, характеризуюш,их конструкцию добычной машины (величина стружки разрушаемого угля каждой кареткой, расстояние между каретками). Устройство реализует управление скосекции оазы, выражаемой
ростью подачи формулой
Ve.c(t)
ГК()
Экономическая эффективность от внедрения предлагаемого способа управления и устройства для его осушествления выражается в повышении производительности угледобывающего агрегата за счет повышения эффективности управления перемещением секций базы, что создает более благоприятные условия для работы добычной машины агрегата и ее привода, увеличивается срок их службы, а также улучшаются энергетические параметры угледобывающего агрегата.
20
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сафохин М | |||
| С | |||
| и др | |||
| Испытания системы поддержания прямолинейности базы крепи | |||
| - «Горные машины и автоматика, 1972, № 8, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Л | |||
| Синхронизация передвижения забойных конвейеров и агрегатных крепей | |||
| В кн.: Вопросы разработки и изучения месторождений полезных ископаемых | |||
| Научные труды МИРГЭМ | |||
| М., 1964, с | |||
| Деревянное стыковое скрепление | 1920 |
|
SU162A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
