буферной памяти знака, БПЗ) в ряде случаев погрешность не будет корректироваться, а инструмент не будет возвращаться точно в исходное положение.
Рассмотрим эти случаи: между кад|рами программы, содержащими информацию о перемещении с противоположными знаками, имеется кадр с паузой или кадр с информацией о перемещении по другим координатам. При отработке промежуточного кадра РПЗ данной координаты оказывается сброшенной, т.е. информация о знаке последнего перед паузой перемещения теряется, и триггер коррекции не взводится-. Tie. коррекции люфта не будет; если число реверсов подачи по координате при отработке данной программы нечетно, каждая новая прогpa 1мa должна начинаться с коррекции люфта (в случае повторения программы, т.е. для изготовления такой же детали), иначе исходное положение инструмента по этой координате каждый раз будет смещаться на величину люфта.
В связ-и с тем, что по окончании программы производится общий сброс всех блоков устройства, в РПЗ не остается информации о знаке последнего перемещения по данной координате закончившейся программы и, если число коррекций нечетное, происходит смещение исходного положения инструмента на величину- люфта.
Цель изобретения - расширение области применения.
Указанная цель достигается тем, что в устройство для числового программного управления, содержащем последовательно соединенные генератор импульсов, счетчик импульсов, блок управлэния, первый элемент И, блок ввода программы,- блок буферной памяти, блок рабочей памяти и интерполятор, последовательно соединенны блок коррекции, блок перезаписи информации и первый логический блок, выход которого соединены со вторыми входами блока рабочей памяти, последовательно соединенные блок анализа координат, блок триггеров коррекции и второй элементен, выходом йодключенный ко второму входу блока перезаписи информации, а также третий элемент И, первым входом соединенны со вторым выходом блока триггеров коррекции, вторым входом - со вторы выходом блока управления, а выходом со вторым входом блока буферной памти, введены четвертый, и пятый элементы И, блок шестых элементов И и второй логический блок, первым .входом через четвертый элемент И соединен со вторыми входами блока анализа координат, первыми входами блока шестых элементов И и выходами блока буферной памяти, второй вход
четв,ертого элемента И соединен со вторым выходом блока управления, третий выход которого соединен со вторыми входами блока рабочей памяти, четвертый выход - с первым входом пятого элемента И, вторым входом соединенного со вторым входом второго логического блока, третьи входы которого подключены к выходам блока рабочей памяти, а выходы - ко второму входу- интерполятора, выходы блока шестых элементов И соединены с четвертыми входами блока рабочей памяти.
Эти изменения предназначены для запрета сброса РПЗ тех координат, по которым в следующем кадре отсутствует информация о знаке перемещения, для запрета сброса РПЗ всех координат при поступлении команды Конец программы, а также для нормальной отработки пауз (т.е. в случае, когда по всем координатам .нет информации о знаке перемещения).
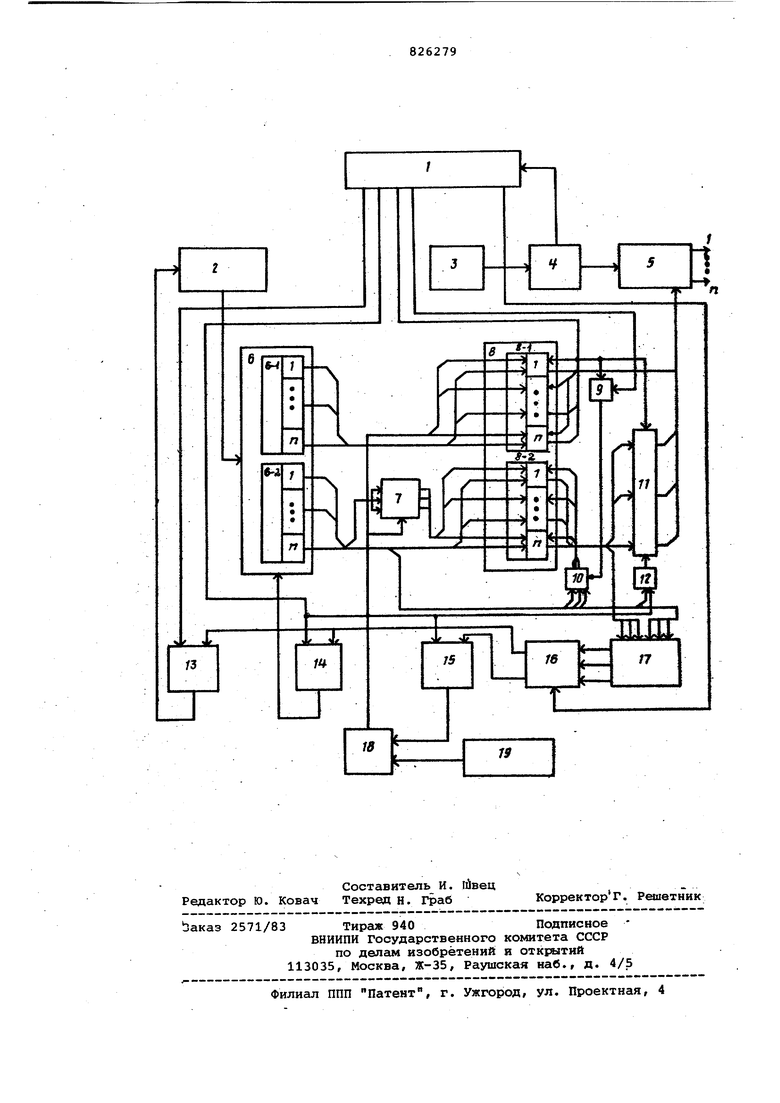
На чертеже представлена структурная схема устройства.
Устройство содержит: блок 1 управления, блок 2 ввода программы, генератор 3 импульсов, счетчик 4, интеполятор 5, блок 6 буферной памяти, состоящей из буферной памяти 6-1 перемещений, и из буферной памяти 6-2 знака, содержащих п областей (где п - число координат), первый логический блок 7, блок 8 рабочей памяти , содержащий рабочую память 8-1 перемещений и рабочую память 8-2 знака, пятый элемент И 9, блок 10 шестых элементов И, второй логический блок 11, четвертый 12, первый 13, третий 14 и второй 15 элементы И, блок 16 триггеров коррекции, содержащих п триггеров, блок 17 анализа координат, блок 18 перезаписи информации и блок 19 коррекции.
Программа обработки считывается кадр за кадром блоком 2 в буферную память, а далее, по мере отработки кадров, содержащихся в рабочей памяти, переписывается из буферной памяти в рабочую.
Назначение элемента И 3 - запрет сброса рабочей памяти 8-2 знака после окончания программы, открытый для прохождения сигнала Сброс в кадра на сброс рабочей памяти 8-2 знака при отсутствии сигнала Конец. программы - на втором ее выходе. При наличии сигнала Конец программы сброс рабочей памяти 8-2 знака запрещенБлок 10 элементов И служит для запрета сброса в рабочей памяти 8-2 знака той координаты, по которой в буферной памяти 6-2 знака нет информации о знаке (т.е. по этой координате в следующем кадре не будет перемещения). Если в буферной памяти какой-либо координаты нет информации о знаке перемещения по этой координате в следующем кадре не будет перемещения, а сигнал Сброс в конце кадра с выхода элемента 9 не пройдет на сброс рабочей памяти 8-2 знака этой же координаты (т.е. сохранится знак последнего перемещения). Блок 11 служит для исключения выдачи импульсов с выхода интерполятора в тех случаях, когда в программе имеется кадр с паузой, т.е. отсутствует перемещение по всем координатам. Если в буферной памяти кадр-пауза то при переходе на вход элемента 12 сигнала Перепись взводится триггер 16, который перекрывает все элементы И, и знаковая информация, имею щаяся в рабочей памяти знака 8-2 после записи туда кадра-паузы, не проходит к интерполятору. Блок 17 анализа координат служит для определения координат, по которым предполагается смена направления подачи. Она представляет собой набор логических схем, число которых равно числу координат. Каждая такая логическая схема выдает сигнал для запус ка соответствующего триггера коррек ции блока 16 в том случае, если в бу ферной и рабочей памяти знака коорди наты, к которой относится логичёс кая схема, имеется противоположная информация о знаке перемещения (т.е по этой координате будет реверс). Блок 18 служит для переписи корректирующих кодов каждой координаты записанных в блоке 19, в рабочую память 8-1 перемещений. Она содержит столько групп элементов И, сколь ко ячеек в рабочей памяти перемещени каждой координаты. Интерполятор 5 за один цикл работы счетчика 4 выдает число импульсов равное числу, записанному в рабочей памяти 8-1 перемещений. При переполнении счетчика 4 (т.е по окончании отработки кадра), блок 1управления сбрасывает рабочую памя и, в зависимости от состояния триггеров коррекции блока 16, производит перепись корректирующих кодов в рабо чую память перемещений одной или . несколько коориднат (в зависимости от того, по каким из координат производится реверс подачи), или перепись следующего кадра из буферной памяти в рабочую память с одновременным сбросом буферной памяти, после чего производится запись нового кадра в буферную память через блок 2ввода программы 2. Положение триггеров коррекции в блоке 16 зависит от состояния триггеров знака буферной памяти 6-2 и триггеров знака рабочей памяти 8-2 каждой координаты. Если по каждой координате триггера знака находятся в одинаковом состоянии (например, по одной координате взведены оба триггера знака минус, по другой - оба триггера знака плюс и т.д.), то смены направления движения инструмента по всем координатам не будет, все триггера коррекции останутся в исходном состоянии, элементы И 13 и 14, управляемые блоком 16, будут открыты, все элементы И блока 15, также управляемые выходами триггеров кор-, рекции, будут закрыты, и работа схемы при переходе от кадра к кадру будет происхоидть без ввода кадра, корректирующего люфт. Если в буферной и рабочей памяти 6-2 и 8-2 знака перед сбросом последней хотя бы по одной из координат окажутся взведены противоположные триггера знака (например, по одной из координат в буферной памяти - знак минус, в рабочей - плюс, и т.п.), то при переходе к отработке следующего кадра будет реверс подачи по данной координате (или по нескольким в зависимости от состояния триггеров знака каждой координаты), и необходима коррекция люфта В этом случае через блок 17 взводятся триггера коррекции блока 16 тех координат, по которым взведены противоположные триггера знака. При этом элементы И 33 и 14 перекрыты, а в блоке 15 открыты те элементы И, которые подключены к взведенным триггерам коррекции (остальные элементы И блока 15 закрыты), и после сброса рабочей памяти в нее через блок 18 с блока 19 вводится корректирующий кадр по тем координатам, по которым запрограммирован ревере подачи, а информация о знаке коррекции переписывается в рабочую память через блок 7 из буферной памяти без последней. Таким образом, корректирующий кадр содержит информацию о знаке коррекции и ее величине, по тем координатам, по которым запрограммирован реверс подачи по остальным координатам информация нулевая. После записи корректирующего кадра сигналом Конец переписи с блока 1 все триггера коррекции блока 16 возвращаются в исходное состояние и происходит отработка коррекции. По окончании отработки корректирующего кадра триггера коррек- , ции находятся в исходном состоянии, элементы И блока 15 перекрыты, элементы 13 и 14 открыты, и после сброса рабочей памяти по команде Конец кадра сигнёшом Сброс-перепись через элемент И 14 производится сброс буферной памяти с одновременной ее nepejjHCbro в рабочую память после чего через элемент И 13 Опок производит запись в буферную память следующего кадра и отработку кадра.
перерисаиного из буферной памяти в рабочую.
Если по одной или нескольким координатам реверс подачи происходит не сразу, а, например, через один или несколько кадров, содержащих информацию о перемещениях по дргим координатам, то по окончании КсЩра при помощи блока 10, связанно с выходами буферной памяти знака и через блок 9 с выходом Сброс по концу кадра блок 1, разрешается
1сброс рабочей памяти знака лишь тех координат, по которым в следующем кадре, записанном в буферной памяти предполагается перемещение,
.рабочая память знака тех координат, по которым в буферной памяти знака нулевая информация, не сбрасывается, за счет чего в рабочей памяти знака при выполнении программы сохраняется информация о знаке последнего перед паузами перемещения, и коррекция в этих случаях будет проводиться.
Если в программе предусмотрен кадр с паузой, т.е. по всем координтам информация о знаках нулевая, а по одной из координат в память перемещения введена информация, задающая длительность паузы, элемент И 12 фиксирует наличие нулевой знаковой информации в буферной памяти знака, перекрывает блок 11, ус-, тановленный между выходами рабочей памяти знака и соответствующими входами интерполятора, и вся знаковая информация, содержащаяся в рабочей памяти при отработке паузы (рабочая память знака не будет сброшена из-з наличия блока 10), будет воспринята как информация без знака, т.е. как пауза.
Если при отработке программе число реверсов подачи по одной или нескольким координатам будет нечетно, информация о знаках последних перемещений каждой координаты по окончании программы сохранится из-з наличия блока 9, установленной в цепи сброса рабочей памяти знака и перекрываемой сигналом Конец программы, и смещения исходного положения инструмента не произойдет.
Применение предлагаемого устройсва позволяет существенно расширить область применения подобных уст , .
Формула изобретения
Устройство для числового программного управления,содержащее последовательно соединенные генератор импульсов, счетчик импульсов, блок управления, первый элемент И, блок ввода программы, блок буферной памяти, блок рабочей памяти и интерполятор, последовательно соединенные
Q блок коррекции, блок перезаписи
информации и первый логический блок, выходы которого соединены со вторыми входами блока рабочей ,памяти, последовательно соединенные блок анализа координат, блок триггеров коррекции и второй элемент И, выходом подключенный ко второму входу блока перезаписи информации, а также третий элемент И, первым входом соединенный со вторым выходом блока триггеров коррекции, вторым входом - со вторым выходом блока управления, а выходом - со вторым входом блока буферной памяти, отличающеес я тем, что, с целью расширения
5 функциональных возможностей устройЪгва, в него введены четвертый и пятый элементы И, блок шестых элементов И и второй логический блок, первым входом через четвертый элемент И
п соединен со вторыми входами блока анализа коориднат, первыми входами блока шестых элементов И и выходами блока буферной памяти, второй вход четвертого элемента И соединен со вторым выходом блока управления, третий выход которого соединен со вторыми входами блока рабочей памяти, четвертый выход - с первым входом пятого элемента И, вторым входом соединенного со вторым входом второго
0 логического блока, третьи входы
которого подключены к выходам блока рабочей памяти, а выходы - ко втоpONjy входу интерполятора,- выходы блока шестых элементов И соединены
5 с четвертыми входами блока рабочей памяти.
Источники информации, принятые во внимание при экспертизе
1.Устройство числового программного управления Контур ЗП-68.
Инструкция по экплуатации ПеЗ, 053, ОООМ5, 1968.
2.Авторское свидетельство СССР по заявке № 2514645/18-24,
кл. G 05 В 19/18, 1977 (прототип). Ж- n
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1979 |
|
SU862116A1 |
| Устройство числового программного управления металлорежущими станками | 1979 |
|
SU857934A1 |
| Устройство для программного управления | 1985 |
|
SU1275373A1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1981 |
|
SU1004974A1 |
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| Устройство для числового программного управления станком | 1978 |
|
SU744465A1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1980 |
|
SU959036A1 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |