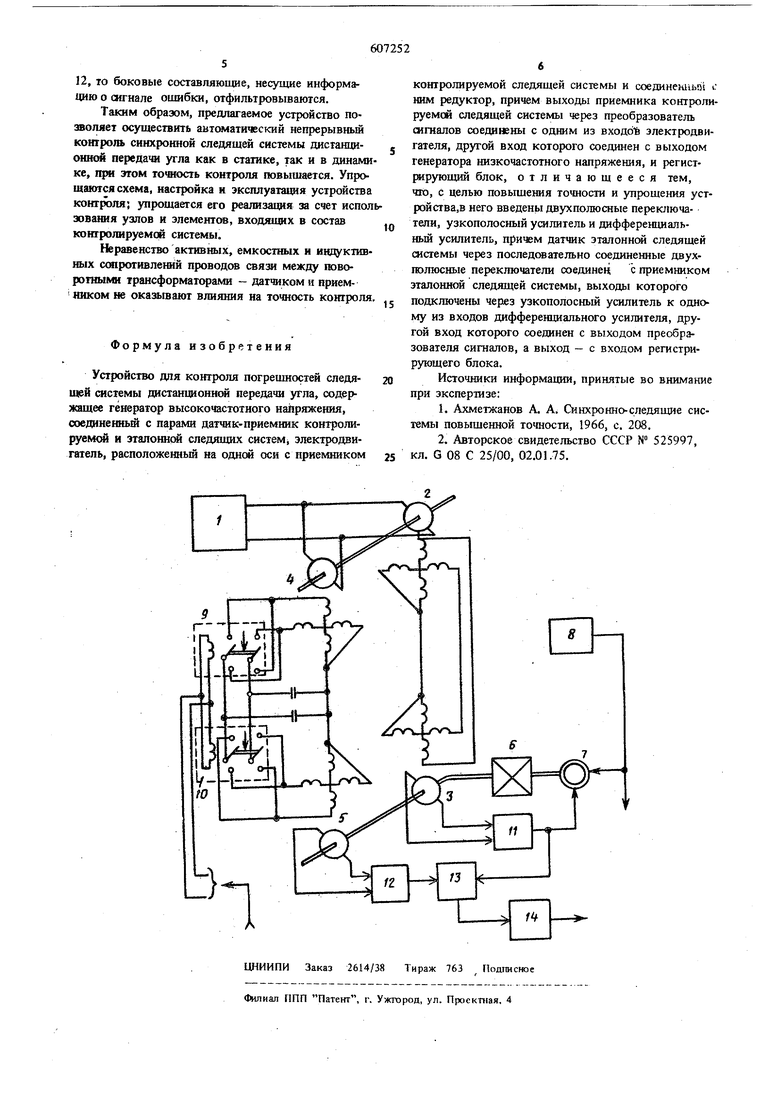
Поставленная цель достигается тем, что в устрой ство для контроля погрешностей следящей системы дистанциониой передачи угла введены двухполюсны 1Бреключатеяи, уэксшолосньш усилитель и дифферен циальный усилитель.Причем датчик эталонной следящ оистемы через последовательно соединенные двухполю ные переключатели соединен с приемником эталонной следящей системы, выходы которого через узко полюсный усилитель подключены к одному из входов дифференииальногоусилителя. Другой вход последнего соединен с выходом преобразователя сигна лов, а выход - с входом регистрирующего блока. На чертеже представлена схема предлагаемого устройства. Устрсйство содержит генератор 1 высокочастотного напряжения, пару датчик 2 - приемник 3 контролируемой следящей системы, пару датчик 4 приемник 5 эталонной следящей системы, редуктор 6, электродвигатель 7, генератор 8 низкочастотного напряжения, двухполюсные переключатели 9 и 10, преобразователь 11 сигналов, узкополосный усилитель 12, дифференииальньш усилитель 13 и регистрирующий блок 14. Пара датчик - приемник контролируемш следящей системы представляет собой двухполюсные поворотные трансформаторы, а пара датчик-приемник эталонной следящей системы пред ставляет собой / -полюсные поворотные трансформа торы. . Устройство работает следующим образом. На выходе приемника 3 контролируемой следящей системы формируется сигнал, пропорциональный утлу рассогласования между датчиком 2 и приемником контролируемся следящей системы. Этот сигнал через преобразователь 1 поступает на управляемую обмотку электродвигателя 7, который приводит во вращение через редуктор 6 вал приемника 3 контролируемой следящей системы до устранения рассогласования. При вращении вала. приелсшкаЗ происходит вращение / -полюсного приемника 5 эталонной следящей системы, который предварительно выставляется таким образом, чтобь сигнал рассогласования между датчиком 4 и приемником эталонной следящей системы при неподв|1жном положении вала датчика 2 был равен нулю. Сигнал с выхода приемника 5 поступает через узкополосный усилитель 12 на вход дифференциального усилителя 13, на вторш вход которого поступает сигнал приемника 3 через преобразова- тель 11. Сигнал рассогласования на выходе приемника 3, поступающий на вход усилителя 13, имеет вид - pac.apj«« au3-«9.npj u3-°uil.npj где .пр.д- действительное значение угла поворота ротора приемника 3; «A.tip идеальное значение утла поворота ротора приемника 3; Ud.npj a.npj- OMj . Д ° оы 3 функция контролируемой ошибки следящей системы дистанционнойпередачи угла. Из уравнения (2) следует, ч1о .npj- u3.npj+ outj (3) Сигнал рассогласования на выходе приемника 5, поступающий на второй вход усилителя 13, имеет вид рас.г.рГ 2 о «из-Р в.прЛ (4) -К/„ - .пр - ouis причем д ОС дщ оы и, следовательно, «а..р., «%e.ap,(5) . Учитывая выражения (3) и (5), на выходе дифференциалыюГо усилителя 13 имеют в«Ф..,сГ W из-«ид.пр,, -К,Г,ЛГра„,.„р ткуда, при и. «„а„р а д„р Ли.р. (бу ч; Из выражения (6) следует, что сигнал на выходе дифференциального усилителя линейно прошрщюнален амплитуде и знаку ощибки контроли1уемой системы передачи угла Величина этой ощибки не зависит от скорости изменения измеряемого вала, что позволяет ос)ацествляп контроль как в статике, так и в динамике. Кроме того, из выражения (6) следует, что использование эталонных поворотных трансформаторов 3, 5 с электрической редукцией NP позволяет в /Г раз уменьшить погрешность контроля, вносимую узкополюсным избирательным усилителем 12, что повышает точность и достоверность контроля. Одной из погрешностей следящей системы дистанционной передачи угла является неравенство активных, емкостных и ийдуктивных сопротивлений проводов связей между поворотШ)1ми трансформаторами датчиков и приемйиков. Для исключения этого недостатка в предлагаемом устройстве применена амплитудная модуляция несущего полезного сигнала высокой частоты низкочастотны сигналом ошибки, при этом на выходе поворотного Трансформатора 5 получается модулированный сигнал, состоящий из несущего полезного сигнала основтой частоты и двух или более боковых частот, амплитуды которых зависят от сигнала ощибки. Так как модутшрованнЫй сигнал поступает с выхода приемника 5 на узкополосный усилитель

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Преобразователь угол-код | 1974 |
|
SU465646A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Устройство для синхронной передачи угла | 1973 |
|
SU446094A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU660072A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| Преобразователь "аналог-код | 1974 |
|
SU519748A1 |
| Двухотсчетный преобразователь уголкод | 1974 |
|
SU482785A1 |
