(54) ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1979 |
|
SU866679A1 |
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Устройство для управления асинхронным электродвигателем | 1979 |
|
SU864479A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Частотно-регулируемый электропривод | 1978 |
|
SU904174A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
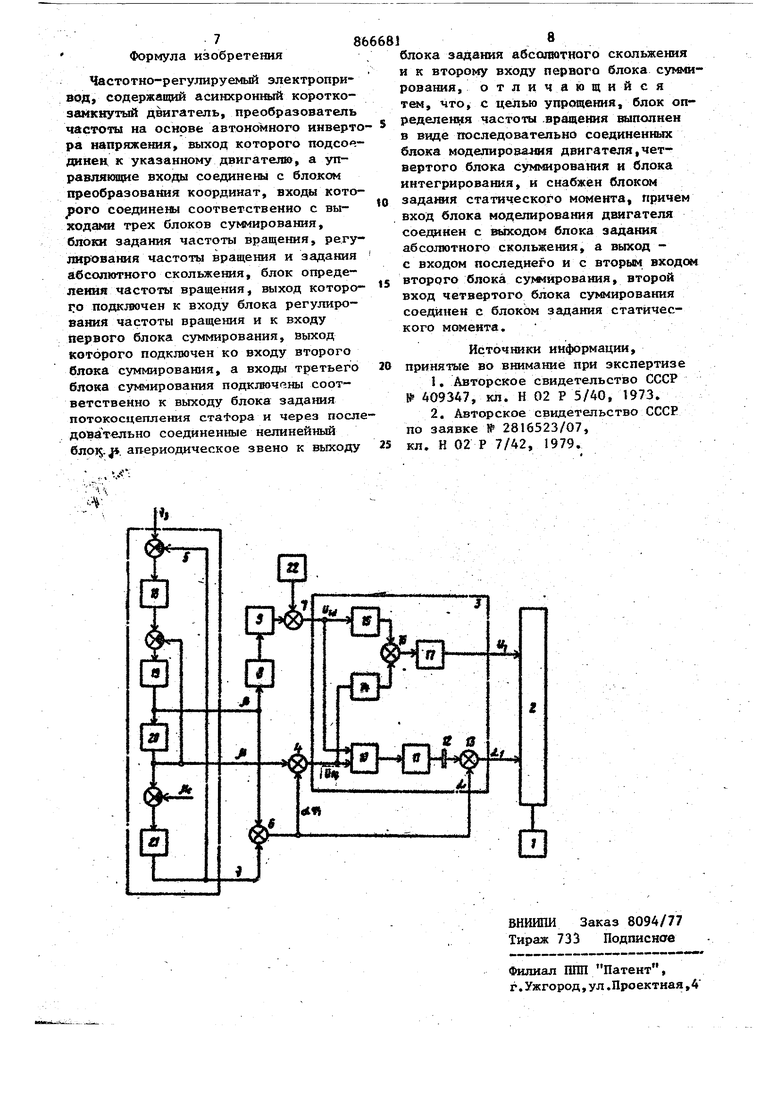
I .... Изобретение относится к электротехнике и может быть использовано в управляемых электроприводах с ти- ристорньв4И npeoбpaзoвaтeля м частоты на основе автономных инверторов напр жения и двигателями с короткозамкнутым ротором. Известен частотно-регулируемый , электропривод, который содержит асин хронный двигатель, преобразователь частоты с автономным инвертором наттр ження, име оиа1й замкнутую систему регулирования амплитуды напряжения, причем вход задания амплитуда на вхо де регулятора напряжения подключен к входу задания частоты через нелинейный элемент, который реализует выбранную зависимость амплитуды иапряжения статора от частоты. Вход зад ния частоты подключен к выходу задат чика интенсивности Dl. Однако нелинейный элемент обеспечивает компенсацию падения напряжения в активных сопротивлениях об- моток статора только при 4иксированном моменте нагрузки. Следовательно, данный привод имеет неудовлетвор1ч- телыме регулировочные характерпсти- ки как в установившемся режиме так и в динамике, поскольку не обеспечивает постоянства потокосцепления двигателя. Недостаток известного электропривода заключается в следующем При работе электропривода рольгангов, выполненного по указанной схеме,- спехщфические особенности рольганговых двигателей, имеющих по вышенное скольжение, и отсутствие в схеме специальных устройств для формипования скольжения двигателей в. динамических режимах приводят;, к низкому качеству регулирования. В частности, при частотном разгоне происходит запаздывание частоты вращения двигател.ей, в момент начала разгона возникает большой бросок тока Преобразователя частоты, который при ограниченной коммутационной способности автономного инвертора напряжения препятствует полному использованию преобразователя для получения больпгах темпов разгона. При частотном торможении отсутствие специального формирования скольжения в генераторном режиме не обеспечивает полного останова двигателей при нуле частояы, Наиболее близким техническим решением к предлагаемому является - астотно-регулируемый асинхронный элект ропривод, содержащий коррткозамкну- тый двигатель, преобразователь часто ты на основе автономного инвертора напряжения, к выходу которого подсое динен упомянутый двигатель, а управляницие входы соединены с блоком преобразования координат, входы которог соеда1нены соответственно с выходами трех блоков суммирования, блоки зада ния частоты вращения, регулирования частоты вращения и задания абсолютного скольжения, соединенные последо вательно, блок определения частоты вращения, зыход которого подключен к входу блока регулирования частоты вращения и входу первого блока сумм рования, а входы третьего блока суммирования подключены соответственно к выходу блока задания потокосцепления статора и через последовательно соединенные нелинейный блок и апе риодическое звено к выходу блока зад ния абсолютного скольжения и к второму входу первого блока суммирования U2. Недостаток известного устройства состоит в том, что блок определения частоты вращения двигателя выполнен .виде тахогенератора, сочлененного с валом двигателя, что усложняет реализацию. Цель изобретения - упрощение. Поставленная цель достигается тем что в устройстве блок определения частоты вращения вьтолнен в виде последовательно соединённых блока моделирования двигателя, четвертого блока суммирова шя и блока интегриро вания, и снабжен блоком задания статического MOMiBHTa, причем вход блока моделирования двигателя соединен с выходом блока задания абсолютного скольжения, а выход - с входом последнегд и с вторым входом второго блока суммирования, второй вход четвертого блока суммирования соединен. 4 с блоком задания статического момента.. На чертеже приведена структурная схема электропривода. ЭлекФропривод содержит асинхронный короткозамкнутый двигатель 1, йоторьй подключен к выходу преобразователя 2 частоты на основе автономного инвертора напряжения. Входы управления.частотой и амплитудой напряжения преобразователя 2 подключены к соответствующим выходам блока 3 преобразования координат. Вход и блока 3 подключен через сумматор 4 к выходу сигнала момента блока 5 модели, второй вход сумматора 4 подключен к входу сигнала oL блока 3 и пыходу блока 6 суммирования, один из входов которого подключен к выходу сигнала абсолютного скольжения |Ь блока 5 модели, а второй вход - к выходу сигнала частоты вращения блока 5. Вход блока 3 подключен к быходу сумматора 7. К второму входу сз мматора 7 подключен выход сигнала и блока 5 через последовательно включенные нелинейный элемент 8 и апериодическое звено 9. В блоке 3 преобразования координат входы Щд и и подключены к входам элемента 10 деления, выход которого подключен через последовательно включенные функциональный элемент 11 с характеристикой arctg и конденсатор 12 к блоку 13 суммирования, второй вход которого подключен к входу сигнала i- , а выход сзгмматора служит вьгходом сигнала L управления частотой преобразователя 2 частоты. Входы Ща и Ц подключены также через квадраторы 14 и 15 и блок 16 сзтчмировання к элементу 17 извлече- ния корня квадратного. Выход элемента 17 служит выходом сигнала U. управления .амплитудой: напрйжения преобразователя 2 частоты. Блок 5 модели представляет модель системы электропривода с двигателем 1, замкнутой по частоте вращения с подчиненным регулятором момента |tt , Он содержит последовательно включённые регулятор 18 чае тоты вращения, регулятор 19 момента, звено 20, моделирующее двигатель и интегратор 21, моделирующий маховую массу двигателя 1 с нагрузкой. Выход звена 20 по цепи отрицательной обратной связи подключен к входу регулятора 19 момента и служит выходом сигнала момента (Л блока модепи. Выход интегратора 21 подключен по цепи отрицательной обратной связи к входу регулятора 18 частоты вращения и служит выходом сигнала частоты а вход интегратора 21 подключен также к источнику сигнала, имитирующего постоянный статический момент Д-с на валу двигателя 1. Регуляторы J8 и J9 астатически, пропорционально-интегральные, вьшолнены на операционных усилителях, шун тированных RC-Цепями. Регулятор 18 имеет регулируемое ограничение выхода. Звено 20 моделирует передаточную функцию М(р) двигателя 1 в соответствии с передаточной функцией апериодического звена, что существенно упрощает устройство. Это апери дическое звено реализуется операцион ным усилителем, шунтированньши по цепи обратной связи резистором и кон денсатором, включенными параллельно. Постоянная времени интегратора выбирается равной инерционной постоянной двигателя 1 с нагрузкой Блок 22 задания потокосцепления статора подсоединен к входу блока 7 сзгммирования и выполнен в виде потенциометра, подключенного к источнику постоянного напряжения. Электропривод работает следукяцим образом. Предположим, требуется ра зогнать двигатель 1 до частоты вращения 4 с заданным темпом. Задается определенное значение ig на входе блока 7 су шрования, соответствующее, выбран ному потокосцепленного статора, например, номинальному. Задается сигна статического момента /t-c на входе интегратора 4 блока модели с учетом реального статического момента на sajiy двигателя 1, например создаваемого металлической заготовкой, транс портируемой рольгангом. По заданному темпу разгона определяется требуемый динамический момент задание момента ji Я.5 с- которое настраивается ограничением выхода регулятора 18. Задание частоты враще ния п на входе блока 5 -подается скачком. Это задание отрабатывается замкнутой системой блока 5, При этом регулятор 18 на/ упоре, на выходе регулятора 19 - сигнал (5 , соответствующий скольжению двигателя 1, а н выходе звена 23 - постоянный заданный момент. Интегратор 21 интегрирует момент и его выходной сигнал V , соответствзгющий частоте вращения двигателя 1, складывается в блоке 6 с ммирования с сигналом р , образуя сигнал cL Одновременно из выходных сигналов блока модели формируются сигналы проекции вектора напряжения и U на выходе блоков 4 и 7 суммирования и производится вычисление сигнала амплитуды напряжения . помощью квадраторов 14 и 15, блока 16, элемента 17, блока 3, и указанный сигнал поступает на вход пегулятора напряжения преобразователя частоты. Частота вращения d вектора Д корректируется в функции производной соотношения сигналов 0, помощью элементов 10 и 11 и конденсатора 12 блока 3, обеспечивая условие Ц (jone-fc в проходном процессе. Результирующий сигнал частоты d вращения вектора напряжения в неподвижной системе координат поступает с выхода блока 13 суммирования на вход управления частотой преобразователя 2 частоты. Происходит разгон двигателя 1. Следовательно, блок модели является не только источником сигналов момента, скольжения и частоты вращения, но и вьшолняет функцию задатчика интенсивности. Процесс разгона заканчивается по достижении сигналом У на выходе интегратора 21 заданного значения Vj . При зтом г.игнал момента на выходе блока 20 снижается до величины jbtg, а скольжение - до соответствующего значения (J . g установившемся режиме сигнал ci.. dl. Таким образом, данный частотнорегулируемый электропривод обеспечивает высокие показатели качества регупировангя за счет того, что модель обеспечивает необходимые данные для формирования напряжения в функции частоты и момента таким образом, что в любом режиме % сопз-1 , а также обеспечивает управление частотой преобра-зователя, соответствунлцее формированию желаемого момента. Щ)и этом пе требуются датчики выходных величин преобразователя, а число двигателей может быть произвольным. Отсутствие тахометрического датчика частоты вращения упростило реализацию.
