причем при достижении К01печной координаты полностью перекрывают перепускной канал демпфирующего устройства.
Принятый способ управлепня основан на параметрическом методе. Регулируемым параметром выбран коэффициент демпфирующего устройства тормоза вязкого трения.
Для случая статически неура вновещеняого механизма, торможение которого осуществляют гидравлическим демпфирующим устройством с регулируемым коэффициентом демпфировадаия, его движение будет происходить в соответстви:и с уравнением
(t)X S(t),(1)
где т - масса двилсущегося механизма; C(t) - коэффициент демпфирования демпфирующего устройства - регулируемый параметр; X - скорость;
S(i) - действующее на механизм внещиее усилие.
Если в процессе работы механизма измерять координату X, ее производную X, изменяющуюся величину ) и принять при расчете массу механизма постоянной, то в рассматриваемо.м дифференциальном уравнеиии остается неизвестным только регулируемый параметр - коэффициент демпфирования C(t).
Для определения коэффициента демпфирования принят метод, когда лестациопариая система, описываемая уравнением (1), заменяется эквивалентной системой с иостоявными коэффициентами. Методы стапионарных систем используются для промежутков с принятыми постоянными коэффициентами, предполагая, что последующее движение системы будет стационарным и на систему не будут действовать случайные возмущения. На следующем промежутке, после измерен ия необходимых параметров движения механизм1а, расчет регулируемого параметра производят для данного промежутка и т. д. вплоть до окончания движения.
Тогда уравнение (1) должно быть представлено как стационарное в виде
(2)
тХ + СХ S,
где т, С - постоянные коэффициенты;
5 - постоянное усилие. Для определения величины коэффициента демпфировапия С, обеспечивающего при его установке на демпфирующем устройстве ПОДХОД механизма .к точке стопорения (конечной координате) с заданной малой окоростью, рещают дифферинциальное уравнение (2) ири следующих условиях:
-начальные условия - значения параметрав движения механизма, измеренные датчиками, например, в точке пути А:
а) текущая координата А„ ХА, б) текущая скорость Х„ VА
-конечные условия - значение параметров движения меха низма, заданные для точки станорения F:
а)координата X,; L,
где L - конечная координата механизма:
б)скорость .-,
где VF - конечная скорость. Решением уравнения (2) будет
А Л.+Лзй (3)
Для определенпя AI и А составляют систему уравнений
с
г
S ,
,-Л.,е
С
(4)
С S,е
-г с т
30 Рещая систему уравнений (4) при указанных Выше Начальных условиях, получают коэффициенты дифференциального уравнения
лС2-| (1/дС-5)те Л, (5)
{VAC-S),n
(6)
При конечных условиях система дифференциальных уравнений преобразуется
-с-°
(7)
L - A,-A.,e
VpC-S
т
(8)
С VAC-S Г
При совместном рещении системы алгебраических трансцендентных уравнений () с применением специальных методов и вычислительной техники находят 55 значение коэффициента дем пфирования С.
Сечение перепускного канала демпфирующего устройства определяют по широко известному выражению
/ 1281та/а
(9) С
где п - коэффициент 3,14;
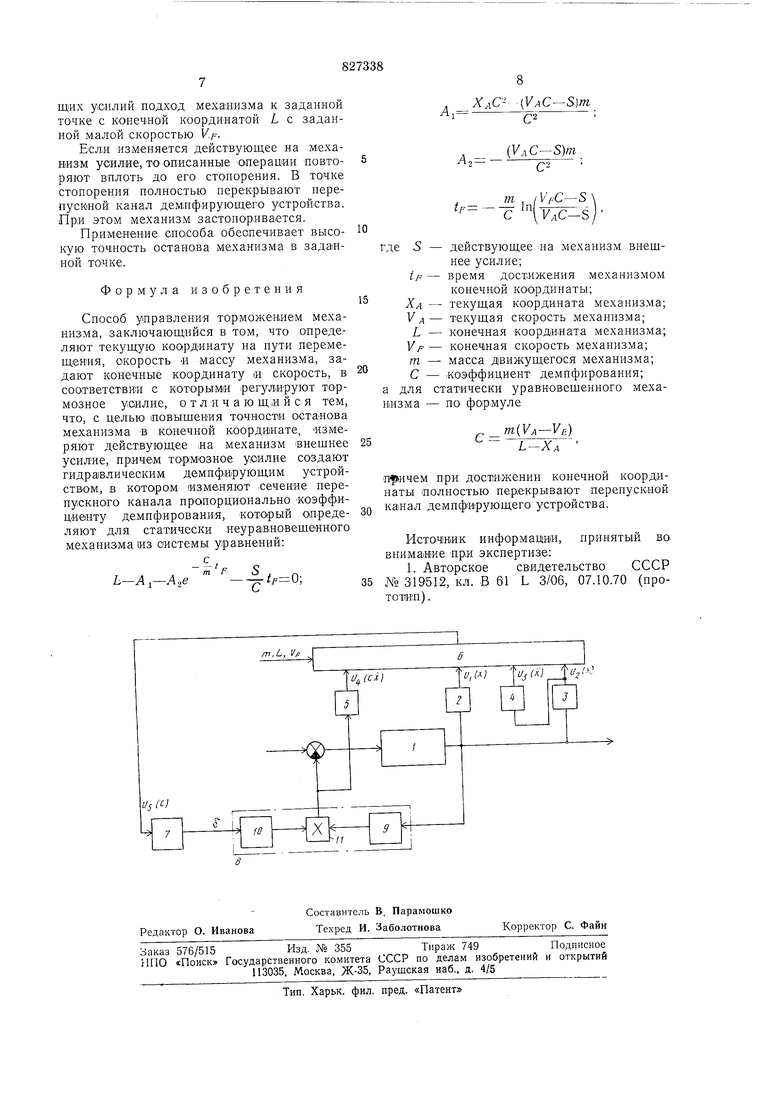
J.I - коэффициент вязкости тормозной 65жидкости; / - длина перепускного канала демпфирующего устройства; а - ллощадь поршня демпфирующего устройства. Для случая статически уравновешенного механизма, тормол ение которого осуществляют гидравлическим демпфирующим устройством с регулируемым коэффиш.ентом демпфирования, его движение будет происходить в соответствш с урав1.епием mX + C(t)X 0. Коэффициент демлфироваяия С, обеспечивающий при его устаповке на демпфирующем устройстве подход механизма к точке стопореиия с заданной малой скоростью, определяют при решении дифференциальпого уравнения (10), учитывая начальные и конечные условия, аналогичные описанном}} выше. Рещением уравнения (10), представленного в стаци-онарном «иде, будет Для получения алгебраического уравнения, при решежи-1 которого может быть определен- коэффициент демпф:ироваиия С демпфирующего устройства тормоза вязкого трения, составляют систему дифференциальных уравнений Л-Л,-А,- С -„ Решая систему дифференциальных уравнений (12) при указанных выше начальных условиях, получают коэффициенты дифференциального уравнения ХлС- Улт С - С При конечных условиях система дифференциальных уравнений (12) преобразуется + A.e г --. ( ят F .,e (10) (11) (13) (14) iOpeoopasyH дифференциальное уравиепие (15) с учетом (13, 14, 16), находят формулу для аналитического расчета коэффициента демпфирования С ni() - Дросселируя перепускной канал так, чтобы величина его сечения соответствовала значению, иайденному .из выражения (9), получают тормозное усилие от сопротивления жидкости движе11;1ю поршня демпфирующего устройства, обеспечивающее подход механизма к конечной координате L с заданной малой скоростью, равной V F. Выбирая скорость в точке стопорения (VF} заранее достаточно малой, осуществляют остановку механизма практически в точке с конечной ксорлииатой L. Кроме того, в момент стопорения автоматически осуществляют полное .перекрытие перепускного канала демпфирующего устройства. Устройство управления, реализующее способ, изображено на чертеже. Для определения координаты J механизма /устройство содержит датчик 2, для определения скорости X - датчик 3, для определения ускорения X. - датчик 4, для определения усилпя, создаваемого демпфирующим устройством,- датчлк 5. Датчики присоединены к вычислительному блоку 6, предназначенному для расчета коэффициента демпфирования С. Для изменения сечения переиускного канала демИфируюн его устройства 1И,меется блок 7. Демпфирующее устройство 8 представляет собой нелинейное звено, состоящее из идеального дифференцирующего звена 9, звена 10 изменения коэффициента демпфировалия и блока перемнол ения //. Для осуществления торможения механизма в одной из точек траектории двилсе«ия механизма, например в точке А, измеряют датчиками координату V(X}-, скорость. Ui(X.} ускорение ) усилие U4(CX), создаваемое демпфирующим устройством. В соответствия с измеренными величинами: ускорением и усилением и заданной массой для статически неуравновещенного механизма вычисляют действующее на него усилие. По измеренным, зада«ным и предварительно рассчитанным величинам вычисляют в вычислительном устройстве 5 величину коэффициента демпфирования f/sCCJ. Посредством блока 7 изменяют сечение 6 перепускного канала де.мпфирующего устройства пропорционально рассчитанному коэфф ициенту демпфирования. Демпфирующим устройством создают тормозное усилие, обеспечивающее при неизменном действующем усиЛИИ S и отсутствии случайных возмущающих усилий подход механизма к заданной точке с конечной координатой L с заданной малой скоростью .
Если изменяется действующее на механизм усилие, то описанные операции повторяют в плоть до его стопорения. В точке стопорения полностью перекрывают перепусмной канал демпфирующего устройства. Прл этом механизм застопоривается.
Применение способа обеспечивает высокую точность останова механизма в заданной точке.
Формула изобретения
Способ управления торможением механизма, заключающийся в том, что определяют текущую координату на пути перемещения, скорость « массу механизма, задают конечные координату и скорость, в соответствии с которыми регулируют тормозное усилие, отличающийся тем, что, с целью повыщения точности оста-нова механизм а в конечной координате, измеряют действующее иа механизм внещнее усилие, причем тормозное усилие создают гидравлическим демпфирующим устройством, в котором изменяют сечение перепускного канала пропорционально -коэффициенту демпфирования, который определяют для статически неуравиовещенного механизма из системы уравнений:
--, 9 L-A,-A,e-- tf---0;
ХлС (
AI С2
л (лС-5)ст А,- :
т
С
действующее иа механизм внещнее усилие;
время достижения механизмом конечн|ой координаты; текущая координата механизма; текущая скорость механизма; конечная координата механизма; конечная скорость механизма; масса движущегося механизма; .коэффициент демпфирования; татически уравновещенного мехапо формуле
rn()
С
L-Хл
при достижении конечной координаты полностью перекрывают перепускной канал демпфирующего устройства.
Источник информации, принятый во внимание при экспертизе:
1. Авторское свидетельство СССР № Э19612, кл. В 61 L ЗЮ6, 07.10.70 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления подъемной машиной при движении сосудов в разгрузочных кривых | 1972 |
|
SU667478A1 |
| Устройство для активного демпфирования упругих колебаний элементов конструкции вращающегося объекта | 1983 |
|
SU1134927A1 |
| Устройство для ограничения динамических усилий механизмов экскаватора | 1990 |
|
SU1788161A1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2011 |
|
RU2490679C1 |
| Гидравлическое тормозное устройство | 1972 |
|
SU502822A1 |
| Устройство для определения характе-РиСТиК упРугОСТи и дЕМпфиРОВАНияНЕлиНЕйНОгО упРугОгО Об'ЕКТА пРипОлуНАТуРНОМ МОдЕлиРОВАНии | 1979 |
|
SU813467A1 |
| СИСТЕМА И СПОСОБ СТЫКОВКИ КОСМИЧЕСКИХ КОРАБЛЕЙ | 2017 |
|
RU2705879C1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ВОЗДУШНЫМ УСТРОЙСТВОМ И ВОЗДУШНОЕ УСТРОЙСТВО С КОНТРОЛЛЕРОМ, ОСУЩЕСТВЛЯЮЩИМ ЭТОТ СПОСОБ | 2015 |
|
RU2695006C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2575368C1 |
| Способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (эвм) и измерительных устройств,смонтированых в путеизмерительном вагоне | 1976 |
|
SU618476A1 |
