Изобретение относится к системам автоматического управления и может быть использовано при управлении ра ботой подъемных машин и лифтов. При движении подъемных сосудов в разгрузочных кривых происходит вы грузка полезного ископаемого, поэто му применяется величина полезной на грузки и приведенная масса движущих ся частей подъемной установки. Точное управление подъемной маши ной при движении сосудов в разгру;Эочных кривых затруднено, Так как система при изменении величины полезной нагрузки становится нестацио Марной, т.е. дифференциальное уравнение/ описывающее движение систеки имеет переменные коэффициенты. Известен способ управления подъе ными машинами, основанный на регули ровании по отклонению перемещения, скорости, ускорения, а также их соч тании 11 . Однако в период дотягивания известный способ не дает достаточной точности из-задействия случайных вЬзмущающих усилий и применения величины полезной нагрузки подъемной машины при движении подъемных сосудов в разгрузочных кривых. Целью изобретения является повышение точности. Цель достигается тем, что допрлнительно измеряют демпфирующее усилие, задаются конечной координатой и конечной скоростью, в соответствии с указанными параметрами рассчитывают коэффициент демпфирования, в соответствии.с которым устанавливают сечение перепускного канала демпфирующего устройства , затем цикл повторяют вплоть до стопорёнйя подъемной машины. В период движения подъемных сосудов в разгрузочных кривых управление подъемной машиной осуществляют при совмещенном режиме с нерегулируювдам движущим усилием, создаваемым асинхронным двигателем, и регулируемым торможением вязким трением, реализуемым демпфирующим устройством с регулируемым козффициентом демпфирования. При этом дафференциальное уравнение движения неуравновешенной системы имеет следующее выражение: m(t) C(t)x-2л (t) - Н S(t)F (t)-KQ(t), (1) где in(t) - масса подвижных частей подъемной машины, приведенная к органу навивки
(масса применяется в про цессе разгрузки) , C(t) - коэффициент демпфировани демпфирующего устройства регулируемый параметр; 4 постоянный коэффициент, характеризующийся раз ; костью веса погонного ме ра хвостовых и головных - -----1 анатов неуравновешенной :..--.,...-.. . системы; Q(t) - полезная нагрузка подъем ной машины, изменяйщаяся rlpoaecce движения подъем ных сосудов в разгрузочн , . кривых; P;«(t) - нёрег лируёмое в периодд дотягивания усилие, создаваемое асинхрбнным дви Тателем;. , . -: К - коэффициент, учитывающий 7 ;сопротийпение двиЖёйию; ; Н - псхлная глубина ствота, шахты; , . X - координата подъемных сос дов; х- Скорост ь; - vj. L : -: ускорение, В nfi оц ее с ё р а 6 оты подъ ёмн ой маши измеряют координату X подъег ых сосудов, ее производные х и х, изме няющуюся величину S(t), а также рас считывгиот соответствующее значение массы m(t), при этом в дифференциал ig ном уравнении (1) остаётся нёизвёст /йый рёгуЛируемый параметр - коэффицйёнт демпфирования C(t). Для решения уравнения (1) необход МО нестационарную систему заменить .эквивалентной стационарной системой : СПостоянными коэффициентами. Методы стационарных: систем исполь зуются дляпромежутка с принятыми постоянными коэффициентами в предполбжёнии, что последующее движение системы будет стационарным. На следующем промежутке после измерения и определения нeoбxoди x параметров р&счёт регулируемого парамётра производится дпя данного промежутка с новыми постоянными параметрами, пред Полагая, что последующее движение стацибнарйым и т.д. вплоть до окойчания процес с огда уравненйё (1) должно быть iipeWdTi BrteHo как стшионарнЬё в вйде« ., ,,,.,.:.. , 1пХ СХ-2Л-Х S 4 Н /(2) где т, с,А - постоянные коэФФициенТЫ. , ..
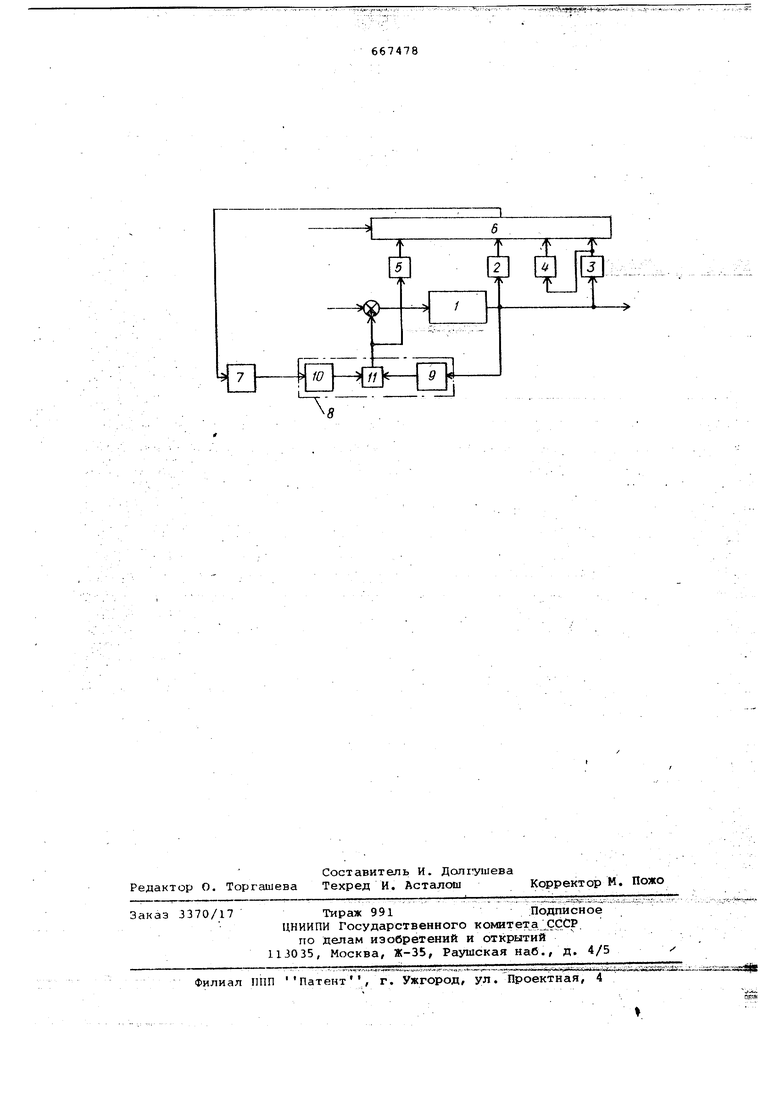
667478 Таким образом, при решении уравнения (2), опЕ)еделяем регулируемый параметр - коэффициент демпфирования (С) демпфирующего устройства. Блок-схема самонастраивающейся системы управления подъемной машиной при Двйхсении подъемных сосудов в разгрузочных кривых, реализующая данный способ, представлена на чертеже. Рабочие параметры подъемной машины 1 (перемещение X) датчи- . ком 2 перемещения, (скорость х ) датчиком 3 скорости, (ускорение х) датчиком 4 ускорения, (усилие, создаваемое демпфирующим устройством, СХ) электрическим манометром 5. Выхода датчиков 2-5 подсоединены к входам вычислительного устройства б расчёта коэффициента демпфирования, выход которого подключен к входу ис|1олнительного механизма 7 установки Коэффициента демпфирования (С) демпфирующего устройства 8, состоящего из дифференцирующего звена 9, звена 10 регулирования коэффициента демпфйроВания и блока 11 перемножения .При движении подъемных сосудов в разгрузочных кривых в соответствии с изменением полезной нагрузки и массы подвижных частей подъемной машины рассчиты вайт новое значение коэффициента демп фирова.ния, в зависимости от KOTop citO демпфирующим устройством создают тормозное усилие - СХ , обеспечивающее управление подъемной машиной . Формула иэобретения Способ управления подъемной машиной при движении сосудов в разгрузочных кривых, основанный на измерении координаты, скорости и ускорения подъёмной машины, от лич а ю щи и с я тем, что, с целью повышения точностей, дополнительно измеряют демпфирующее усилие, задгиотся конечной координатой и конечной скоростью, в соответствии с указанными парамет рамй рассчи гывают коэффициент демпфирования, в соответствии с которым устанавливают сечение перепускного канала демпфирующего устройства, затем цикл повторяют вплоть до стспорения подъемной машины. Источники информации, принятые во внимание при экспертизе IV АвтОрёкбе свидетельство СССР № 217618, кл. В 66В 1/24, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления торможением механизма | 1979 |
|
SU827338A1 |
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Способ регулирования процесса предохранительного торможения шахтной подъемной машины | 1983 |
|
SU1146269A1 |
| СПОСОБ ПОЛУПАССИВНОЙ ТРЕХОСНОЙ СТАБИЛИЗАЦИИ ДИНАМИЧЕСКИ СИММЕТРИЧНОГО ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2006 |
|
RU2332334C1 |
| Нелинейное корректирующее устройство для систем автоматического управления | 1978 |
|
SU752219A1 |
| Устройство для активного демпфирования упругих колебаний элементов конструкции вращающегося объекта | 1983 |
|
SU1134927A1 |
| Устройство для управления скоростным режимом подъемной установки | 1977 |
|
SU715420A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU948869A1 |
| Способ демпфирования колебаний и устройство для его осуществления | 1990 |
|
SU1776896A1 |
| СПОСОБ ПОЛУПАССИВНОЙ СТАБИЛИЗАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2191146C1 |