1
Изобретение относится к области автоматизации землеройно-транспортных машин, а именно к устройствам контроля положения ковша в рабочем пространстве.
Известно устройство для контроля положения ковша экскаватора-драглайна, которое включает блок регулирования скорости тяги, задатчик скорости тяги, блок регулирования скорости подъема, задатчик скорости подъема, блок программного задания скорости подъема, блок выделения управляюш;его сигнала скорости подъема, два блока программного задания скорости тяги, блок выделения управляюш,его сигнала скорости тяги, подъемную и тяговую лебедки 1.
Недостатком этого устройства является невысокая точность задания зон ограничения приближения ковша к стреле из-за механической связи блоков программного задания скорости тяги и подъема с барабанами лебедок подъема и тяги через дифференциальный редуктор и зубчатые передачи, а также то, что в устройстве отсутствует приборный контроль положения ковша в рабочем пространстве.
Известно также устройство для контроля положения ковша экскаватора-драглайна, включаюшее датчик длины тяговых канатов, датчик длины подъемных канатов 2.
Данное устройство осуществляет вычисление величины отклонения движения ковша от опасной зоны в каждый текущий момент времени, однако данный параметр не
содержит информации о дальнейшем, ближайшем будушем движения ковша, что может создать аварийную ситуацию.
Целью изобретения является повышение надежности работы экскаватора.
Для этого устройство снабжено задатчиками маневра тяги и подъема, четырьмя интеграторами, тремя сумматорами, тремя блоками памяти, блоком выделения минимального сигнала и индикатором, причем
выход задатчика маневра тяги подключен через последовательно соединенные первый и второй интеграторы к одному из входов первого и второго сумматоров, выход задатчика маневра подъема через последовательно соединенный третий и четвертый интеграторы подсоединены к одному из входов второго и третьего сумматоров, выход каждого из сумматоров через соответствующий блок памяти соединен с одним из
входов блока выделения минимального сигнала, выход которого соединен с иидикатором, выход датчика скорости привода подъема соединен со входом начальных условий третьего интегратора, а выход датчика длины подъемных канатов соединен
со входом начальных условий четвертого интегратора, выход датчика скорости нривода тяги соединен со входом начальных условий нервого интегратора, а выход датчика длины тяговых канатов соединен со входом начальных условий второго интегратора.
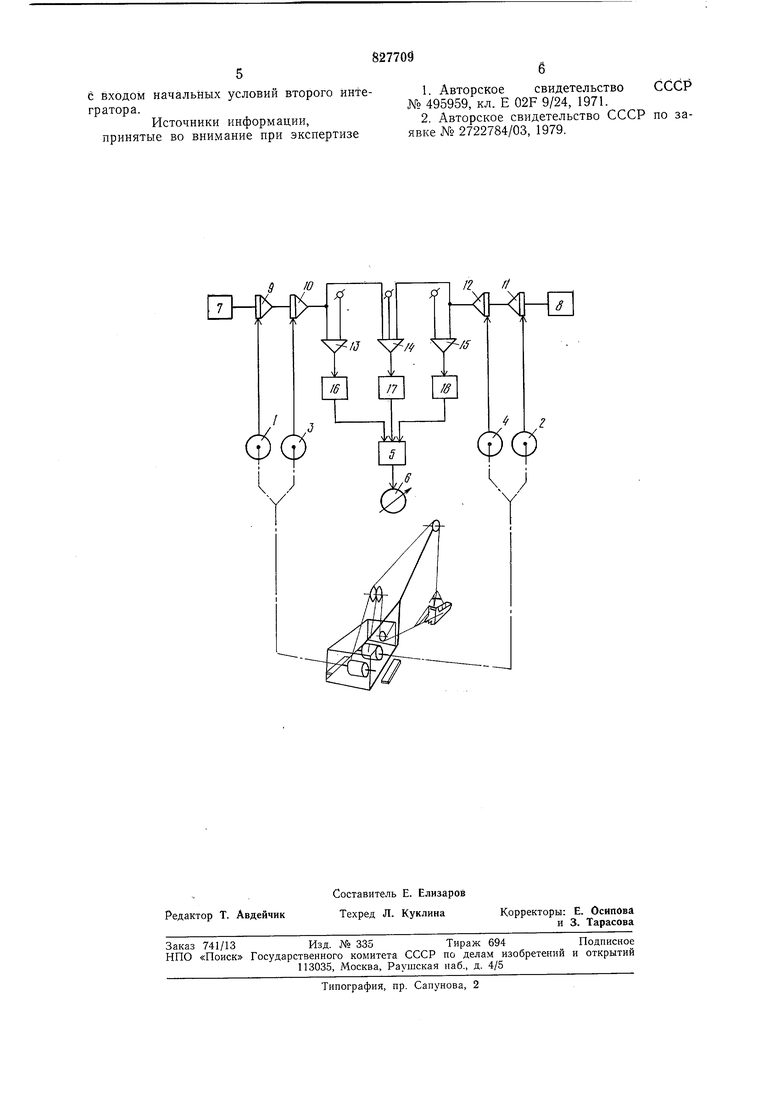
Схема устройства нриведена иа чертеже.
Устройство содержит датчики 1, 2 скорости движения лебедок тяги и нодъема, датчики 3, 4 длин тяговых и нодъемных канатов, блок 5 выделения минимального сигнала, индикатор 6, задатчик 7 маневра тяги, задатчик 8 маиевра подъема, интеграторы 9, 10, И, 12, сумматоры 13, 14, 15, блоки намяти 16, 17, 18. Датчики 1, 3 соединены с валом лебедки тягового механизма, а датчики 2, 4 с валом лебедки иодъемного механизма. Выходы датчиков 1, 3 подключены соответственно к входам начальных условий интеграторов 9, И, соединенных последовательно, и вход первого из пих соединен с выходом задатчика маневра тяги 7, а выход последнего подключен к входам сумматоров 13, 15. Выходы датчиков 2, 4 подключены соответственно ко входам начальных условий интеграторов 10, 12, соединенных последовательно, и вход первого из них соединен с выходом задатчика маневра подъема, а выход последнего подключен к входам сумматоров 14, 15. На дополнительные входы сумматоров 13, 14, 15 подается напряжение постоянного тока. Выходы сумматоров 13, 14, 15 подключены на входы блоков намяти соответственно 16, 17, 18, выходы которых подключены ко входам блока выделения минимального сигнала 5, а его выход подключен на вход индикатора 6.
Устройство работает следующим образом.
На сумматоры 13, 14, 15 подаются постоянные напряжения, пропорциональные значениям констант, характеризуюнд,их границы онасных зон. Граница трех зон, в которую не должен попадать ковш, состоит из дуги эллипса с фокусами в точках схода канатов нодъема и тяги, и дуг окружностей с центрами соответственно в голове и пяте стрелы экскаватора-драглайна.
Во время движения ковша в рабочем пространстве текущие значения длин канатов подъема и тяги, и их скоростей ностунают на начальные условия интеграторов 9, 10, И, 12. Задатчики маневра тяги 7 и подъема 8 формируют сигналы управления для вывода ковша из аварийной ситуации. Эти сигналы поступают на входы интеграторов 9, 10, работающих в ускоренном масштабе времени. На интеграторах 11, 12, работающих также в ускоренном масштабе времени, вырабатываются сигналы, пропорциональные будущим значениям длин канатов подъема и тяги, начиная с текущих значений. Тем самым прогнозируется возможное попадание ковша в опасную зону. Сумматоры 13, 14, 15 вырабатывают сигналы, пронорциональные расстоянию до опасных зон. В блоках памяти 16, 17, 18 формируются сигналы наименьших расстояний за время прогнозирования до опасных зон. Блок выделения минимального сигнала 5 определяет в каждый текущий момент времени ближайшую опасную зону
и расстояние до нее. По индикатору 6 машинист определяет расстояние и критический момент времени, при котором необходимо осуществить вывод ковша из опасной зоны.
Использование устройства нозволит повысить точность определения опасных зон за счет более полного учета динамических свойств движения ковша, а также позволяет приборной индикацией предупредить машиниста о будущем положении ковща относительно опасных зон при выводе из аварийной ситуации, кроме того, устройство указывает тот момент времени, когда необходимо осзществить вывод ковша из опасНОИ зоны.
Использование предлагаемого изобретеиия на экскаваторе-драглайне типа ЖШ15-90А позволит снизить число аварий, следствием которых являются длительные простои экскаватора-драглайна.
Формула изобретения
Устройство для контроля положения ковша экскаватора-драглайна, включающее датчик длины тяговых канатов, датчик длины подъемных канатов, датчик скорости привода подъема и датчик скорости привода тяги, отличающееся тем, что, с целью повышения надежности работы экскаватора, оно снабжено задатчиками маневра тяги и подъема, четырьмя интеграторами, тремя сумматорами, тремя блоками памяти, блоком выделения минимального
сигнала и индикатором, причем выход задатчика маневра тягн подключен через последовательно соединенный первый и второй интеграторы к одному из входов первого н второго сумматоров, выход задатчика маневра подъема через последовательно соединенные третий и четвертый интеграторы подсоединены к одному из входов второго и третьего сумматоров, выход каждого из сумматоров через соответствующий блок памяти соединен с одним из входов блока выделения минимального сигнала, выход которого соединен с индикатором, выход датчика скорости привода подъема соединен со входом начальных условий
третьего интегратора, а выход датчика скорости привода тяги соединен со входом начальных условий первого интегратора, выход датчика длины нодъемных канатов - с входом начальных условий четвертого интегратора, а выход длины тяговых канатов-
с входом начальных условий второго интегратора.
Источники информации, принятые во внимание ири экспертизе
1.Авторское свидетельство СССР № 495959, кл. Е 02F 9/24, 1971.
2.Авторское свидетельство СССР по заявке № 2722784/03, 1979.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля положения ковша экскаватора-драглайна | 1980 |
|
SU964061A2 |
| Устройство для защиты стрелы экскаватора-драглайна | 1983 |
|
SU1194972A2 |
| Устройство для защиты стрелы экскаватора-драглайна | 1979 |
|
SU787562A1 |
| Устройство управления процессом транспортирования ковша драглайна | 1988 |
|
SU1544898A1 |
| Устройство защиты стрелы от растяжки ковша экскаватора-драглайна | 1977 |
|
SU777157A1 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2130998C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКОВАТРА-ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543837C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ДРАГЛАЙНА ПРИ КОПАНИИ | 2006 |
|
RU2326212C1 |
