I
Изобретение относится к автоматизации горных машин, а именно к устройствам защиты оборудования экскаватора-драглайна.
Известно устройство для защиты экскаватора-драглайна от растяжки, переподъема и перетяги ковша, содержащее преобразователи углов поворота лебедок в цифровой код, формирователи импульсов, т.1 иггеры и двоичные счетчики. .°
Известно также устройство для защиты стрелы экскаватора-драглайна, включающее блоки регулирования приводов тяги и подъема, блок программного задания скорости привода подъема, первый и второй блоки программного задания скорости привода тяги, блоки ручного задания скорости приводов тяги и подъема и блоки выделения управ- ляющего сигнала приводов тяги и подъема .
Однако известные устройства не обладают -высокой надежностью защиты
стрелы экскаватора-драглайна от растяжки, переподъема и перетяги ковша. Цель изобретения - повышение надежности защиты стрелы от растяжки, переподъема и перетяги ковша.
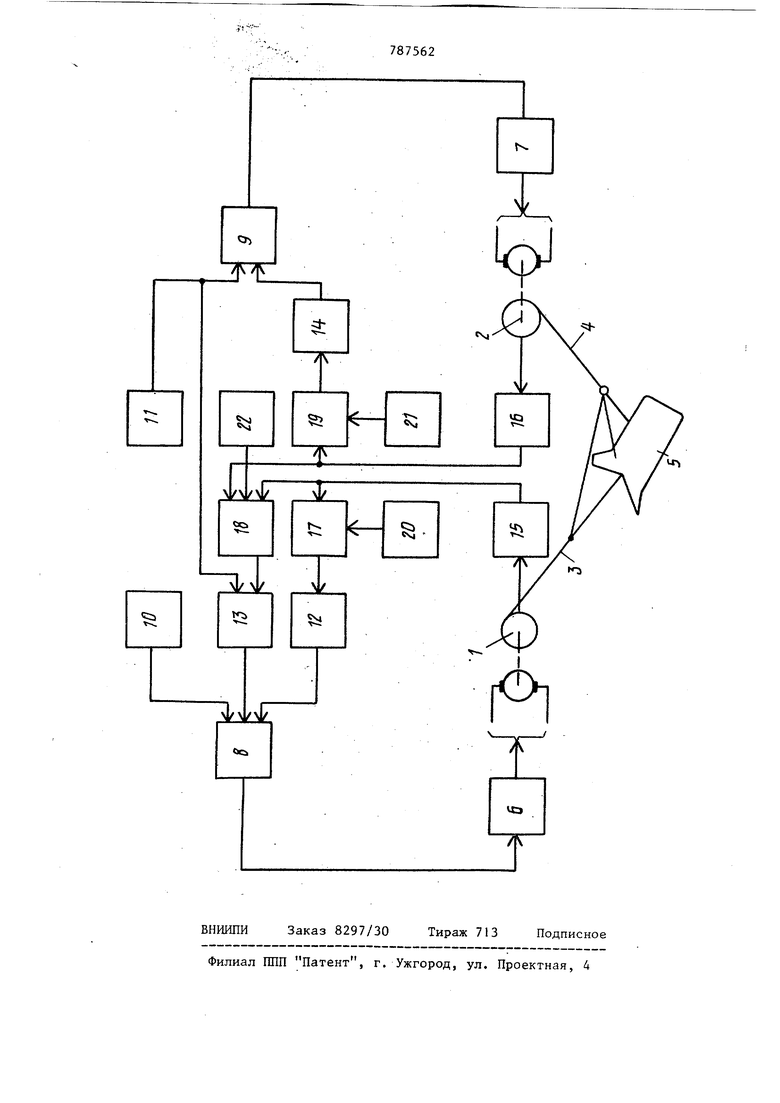
Указанная цель достигается тем, что устройство снабжено датчиками длины тяговых и подъемных накатов, задатчиками минимальной длины тяговых и подъемных канатов, задатчикомминимальной суммы длин тяговых и подъемных канатов, первым, вторым и третьим суммирующими блоками, причем выход датчика длины тяговых канатов соединен с одним из входов первого и вто.рого суммирующих блоков, а выход датчика длины подъемных канатов соединен с одним из входов второго и третьего суммирующих блоков, выход первого суммирующего блока соединен со входом первого блока программного задания скорости привода тяги, выход второго суммирующего блока соединен со входом второго блока программного 378 задания скорости привода тяги, а выход третьего суммирующего блока - со входом блока программного задания скорости подъема, задатчик минимальной длины тяги тяговых канатов соединен с одним из входов первого суммирующего блока, задатчик минимальной длины подъемных канатов соединен с одним из входов третьего суммирующего блока, а задатчик минимальной суммы длин подъемных и тяговых канатов - с одним из входов второго суммирующего блока. На чертеже изображена схема устройства. Устройство содержит тяговую лебедку 1 с приводом, подъемную лебедку 2 с приводом, тяговые 3 и подъемные 4 канаты,несущие ковш 5,блок 6 регулиро вания скорости тяги,блок 7 регулирова ния скорости подъема,блок 8 выделения управляющего сигнала привода тяги, блок 9 выделения управляющего сигнала привода подъема,ручной задатчик 10 скорости привода тяги,ручной задатчик 11 скорости привода подъема,первый 12 и второй 13 блоки программного задания скорости привода тяги,блок 14 программного задания скорости привода подъема, датчик 15 длины тяговых каиатов, соединенный с валом лебедки 1 тяги, датчик 16 длины подъемных канатов , соединенньй с валом лебедки 2 подъема. Выход датчика 15 длины тяговых канатов соединен со входами первого 17 и второго 18 суммирующих блоков. Выход датчика 16 длины подъемных канатов соединен с другим входом второго суммирующего блока 18 и входом третьего суммирующего блока 19. Задатчик 20 минимальной длины тяговых канатов подключен ко второму входу суммирующего блока 17, задатчик 21 минимальной длины подъемник ка натов подключен ко второму входу суммирующего блока 19, а задатчик 22 минимальной суммы длин подъемных и . тяговых канатов подключен к третьему входу суммирующего блока 18. Устройство работает следующим образом.. Предельная ограничительная траекто рия движения ковша для защиты от растяжки имеет вид эллиптической кривой, характеризующейся минимальной суммой длин подъемных и тяговых канатов, и формируется задатчиком 22. Сигналы датчиков 15 и 16 длин тяговых и подъемных канатов суммируются в блоке 18, ,на выходе которого образуется сигнал отклонения этой суммы от минимального значения. По мере приближения ковша к предельной траектории блок 13 формирует в функции отклонения суммы длин канатов и скорости подъема программный сигнал, который вместо сигнала задатчика 10 скорости привода тяги подключается блоком 8 ко входу блока 6 регулирования скорости привода- тяги, обеспечивая плавный выход ковша на предельную траекторию. По мере приближения ковша к головным блокам для защиты от переподъема или к блокам наводки для защиты от перетяги в функции отклонения длин канатов от их минимально допустимого значения блоками 14 и 12 формируются программные сигналы, которые подключаются блоками 9 и 8 вместо сигналов задатчиков 11 и 10 на входы соответствующих блоков 7 и 6 регулирования скорости, что обеспечивает плавный останов лебедок. Использование предлагаемого устройства защиты стрелы исключает аварийные режимы, следствием которых являются длительные простои экскаватора-драглайна . Формула изобретения Устройство для защиты стрелы зкскаватора-драглайна, включающее блоки регулирования скорости приводов тяги и подъема, блок программного задания скорости привода подъема, первый и второй блоки программного задания скорости привода тяги, блоки ручного задания скорости приводов тяги и подъема и блоки выделения управлякщего сигнала приводов тяги и подъема, о тличающееся тем, что, с целью повьщ1ения надежности защиты стрелы от растяжки, переподъема и перетяги ковша, оно снабжено датчиками длинь тяговых и подъемных канатов, задатчиками минимальной длины тяговьгх и подъемных канатов, задатчиком минимальной суммы длин тяговых и подъемных канатов, первым, вторым и третьим суммирующими блоками,причем выход длины тяговых канатов соединен с одним из входов первого и второго суммирующих, блоков, а выход датчика длины,подъемных канатов соединен с одним из входов второго и третьего
суммирующих блоков, выход первого суммирующего блока соединен со входом первого блока программного задания скорости привода тяги, выход второго суммирующего блока соединен со входом второго блока программного задания скорости привода тяги, а выход третьего суммирующего блока - со входом блока программного задания скорости
подъема, задатчик минимальной длины тяговых канатов соединен с одним из входов первого суммирующего блока, задатчик минимальной длины подъемных канатов соединен с одним из входов третьего суммирующего блока, а задатчик минимальной суммы длин подъемных и тяговых канатов - с одним из входов второго суммирующего блока.
fvj
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты стрелы экскаватора-драглайна | 1983 |
|
SU1194972A2 |
| Устройство для контроля положения ковша экскаватора-драглайна | 1980 |
|
SU964061A2 |
| УСТРОЙСТВО для ЗАЩИТЫ ЭКСКАВАТОРА-ДРАГЛАЙНА ОТ РАСТЯЖКИ, ПЕРЕПОДЪЕМА И ПЕРЕТЯГИ КОВША | 1966 |
|
SU181256A1 |
| Устройство для контроля положенияКОВшА эКСКАВАТОРА-дРАглАйНА | 1979 |
|
SU827709A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКОВАТРА-ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543837C1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Способ защиты стрелы экскаваторадраглайна | 1977 |
|
SU717239A1 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| Устройство управления электроприводом тяги экскаватора-драглайна | 1981 |
|
SU956697A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |