31544898
Изобретение относится к горной промышленности и может быть использовано для управления рабочим обору- дованием экскаваторов-драглайнов. с
Цель изобретения - повышение надежности за счет снижения динамическим нагрузок рабочего оборудования при транспортировании ковша.
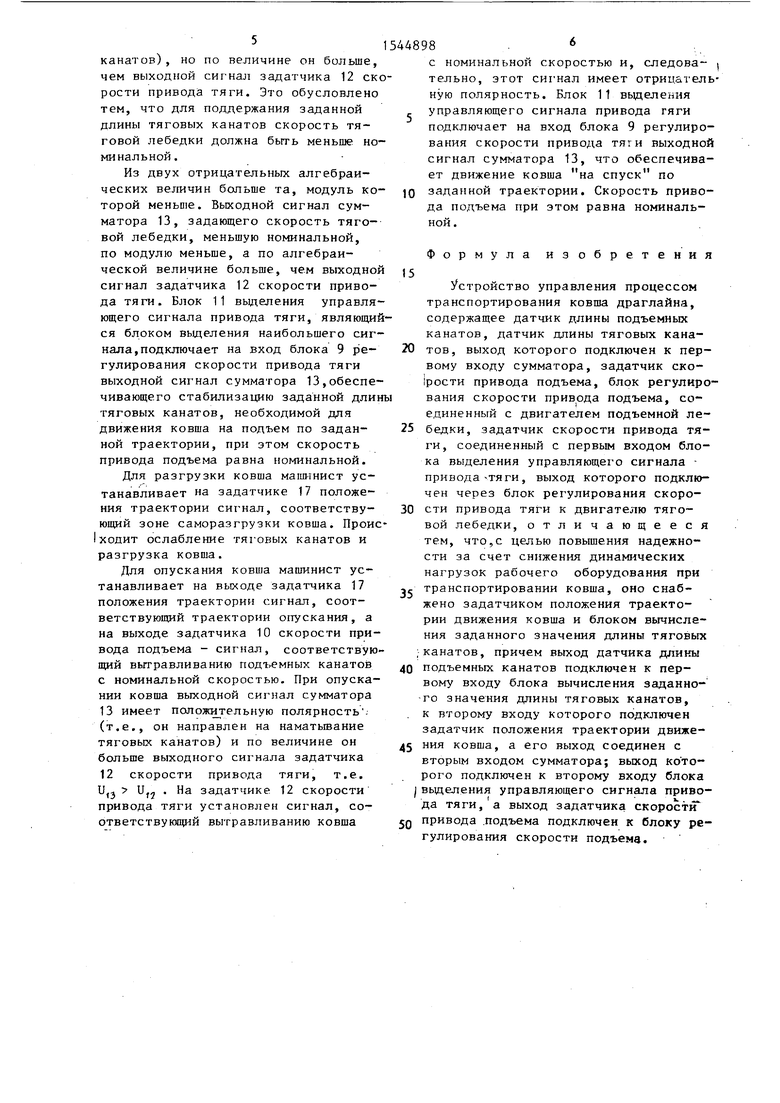
На фиг.1 представлена блок-схема ю устройства управления процессом транспортирования ковша драхлайна; на фиг.2 - траектории движения ковша.
Устройство содержит ковш 1 с подъемными 2 и тяговыми 3 канатами, 15 (подъемную 4 и тяговую 5 лебедки с двигателями 6 и 7 приводов подъема и тяги, подключенные к блокам 8 и 9 регулирования скорости приводов подъема и тяги. На вход блока 8 регули- 20 рования скорости привода подъема поступает сигнал с задатчика 10 скорости привода подъема. На вход блока 9 регулирования скорости привода тяги поступает сигнал от блока 11 выде- 25 ления управляющего сигнала привода тяги, на первый вход которого поступает сигнал от задатчика 12 скорости привода тяги, а на второй его
L, Ln - длины стрелы и подъем ных канатов;
- угол между осью стрелы и подъемными канатами (угол саморазгрузки ковша).
При постоянных значениях тра ектории движения ковша будут представлять собой прямые линии, проходящие через головные блоки стрелы. Поэтому, формируя заданную длину тяговых канатов в соответствии с формулой (1), возможно осуществлят автоматическое управление транспортированием ковша по любым прямолине ным траекториям, принадлежащим области рабочих траекторий движения ковша. Эти траектории выбираются с учетом паспорта ведения горных работ.
Для подъема груженого ковша маринист устанавливает на задатчике 1 положения траектории движения ковша сигнал, соответствующий заданному углу саморазгрузкн, который определяет заданную траекторию движения ковша. Если позволяет паспорт ведения горных работ, траектория может
вход - от сумматора 13 К первому BXO--JQ быть выбрана вблизи линии самораэду сумматора 13 подключен датчик 1-4 Ьлины тяговых канатов,, а к второму входу - выход блока 15 вычисления заданного значения длино тяговых канатов, входы которого соединены с датчиком 16 длины подъемных канатов и задатчиком 17 положения траектории движения ковша.
Устройство работает следующим образом.
Известно, что оптимальная траектория по критерию минимума энергозатрат представляет собой прямую линию, проходящую вблизи линии саморазгрузки. В плоскости стрелы между линиями, образованными стрелой, тяговыми и подъемными канатами, может быть выделен треугольник (фиг.2). При известных длинах стрелы L и подъемных канатов Ln драглайна можно, задавая значения , вычислить длин/ тяговых канатов в соответствии с теоремой косинусов
35
40
грузки, чтобы удовлетворить энергетическому критерию оптимальности по минимуму энергозатрат. Так как на вход блока 15 вычисления, производящего вычисление по формуле (1), также поступает сигнал от датчика 16 длины подъемных канатов, соответ ствующий их длине в точке окончания операции копания,то на его выходе будет сформирован сигнал задан ной длины тяговых канатов LT дл движения ковша по заданной траектории. После отрыва ковша от поверхно сти забоя машинист устанавливает на д задатчике 10 скорости привода подъе ма сигнал, соответствующий номиналь ной скорости привода на подъем ковша, а на задатчике 12 скорости привода тяги - сигнал, соответствующий номинальной скорости привода тяги н вытравливание тяговых канатов, кото рый имеет отрицательную полярность по отношению к потенциалу операцион ной земли.
50
L, Ln - длины стрелы и подъемных канатов;
- угол между осью стрелы и подъемными канатами (угол саморазгрузки ковша).
При постоянных значениях траектории движения ковша будут представлять собой прямые линии, проходящие через головные блоки стрелы. Поэтому, формируя заданную длину тяговых канатов в соответствии с формулой (1), возможно осуществлять автоматическое управление транспортированием ковша по любым прямолинейным траекториям, принадлежащим области рабочих траекторий движения ковша. Эти траектории выбираются с учетом паспорта ведения горных работ.
Для подъема груженого ковша маринист устанавливает на задатчике 17 положения траектории движения ковша сигнал, соответствующий заданному углу саморазгрузкн, который определяет заданную траекторию движения ковша. Если позволяет паспорт ведения горных работ, траектория может
быть выбрана вблизи линии самораэ
грузки, чтобы удовлетворить энергетическому критерию оптимальности по минимуму энергозатрат. Так как на вход блока 15 вычисления, производящего вычисление по формуле (1), также поступает сигнал от датчика 16 длины подъемных канатов, соответствующий их длине в точке окончания операции копания,то на его выходе будет сформирован сигнал заданной длины тяговых канатов LT для движения ковша по заданной траектории. После отрыва ковша от поверхности забоя машинист устанавливает на задатчике 10 скорости привода подъема сигнал, соответствующий номинальной скорости привода на подъем ковша, а на задатчике 12 скорости привода тяги - сигнал, соответствующий номинальной скорости привода тяги на вытравливание тяговых канатов, который имеет отрицательную полярность по отношению к потенциалу операционной земли.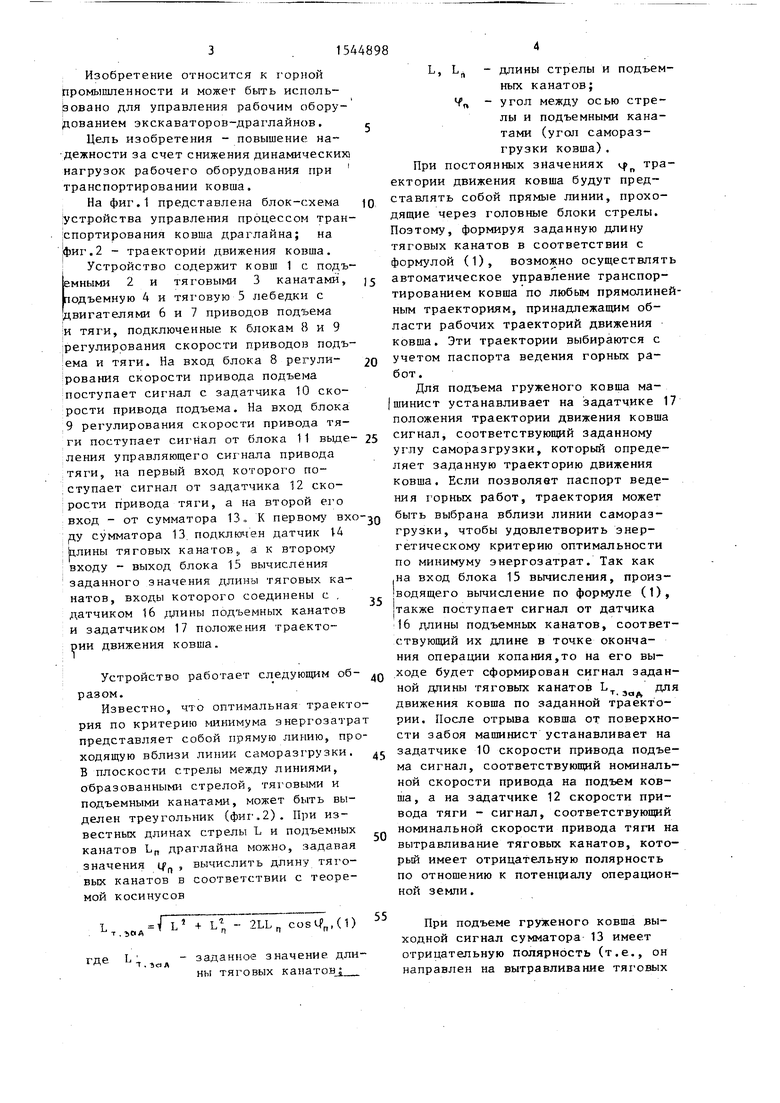
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| Устройство управления электроприводом тяги экскаватора-драглайна | 1981 |
|
SU956697A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ автоматического управления процессом транспортировки ковша драглайна | 1970 |
|
SU627219A1 |
| Устройство для защиты стрелы экскаватора-драглайна | 1983 |
|
SU1194972A2 |
| Устройство защиты стрелы от растяжки ковша экскаватора-драглайна | 1977 |
|
SU777157A1 |
| Устройство для контроля положенияКОВшА эКСКАВАТОРА-дРАглАйНА | 1979 |
|
SU827709A1 |
| Способ управления процессом черпания экскаватора-драглайна и устройство для его осуществления | 1980 |
|
SU910957A1 |
Изобретение относится к горной промышленности и предназначено для управления рабочим оборудованием экскаваторов-драглайнов. Цель - повышение надежности за счет снижения динамических нагрузок рабочего оборудования при транспортировании ковша. Устройство содержит блоки 8 и 9 регулирования скорости приводов подъема /ПП/ и привода тяги (ПТ), подключенные соответственно к двигателям 6 и 7 лебедок 4 и 5 подъемного каната 2 и тягового каната (ТК) 3. На вход блока 8 поступает сигнал с задатчика 10 скорости ПП, а на вход блока 9 сигнал от блока 11 выделения управляющего сигнала ПТ, на входы которого поступают сигналы от задатчика 12 скорости ПТ и сумматора 13. Последний суммируют сигналы с датчика 14 длины ТК 3 и с блока 15 вычисления заданного значения длины ТК 3. Последнее вычисляется на основании сигналов с датчика 16 длины подъемных канатов и задатчика траектории движения ковша. Блок 11 является блоком выделения наибольшего сигнала и подключает на вход блока 9 выходной сигнал сумматора, обеспечивающий стабилизацию заданной длины ТК 3, необходимой для движения ковша на подъем или спуск по заданной трактории. При этом скорость ПП будет минимальной. 2 ил.
т гол
4 L
„ - 2LLn cos.d)
где
Т . 3d А
- заданное значение длины тяговых KanaTOBj
При подъеме груженого ковша выходной сигнал сумматора 13 имеет отрицательную полярность (т.е., он направлен на вытравливание тяговых
канатов), но по величине он больше, чем выходной сигнал задатчика 12 скорости привода тяги. Это обусловлено тем, что для поддержания заданной длины тяговых канатов скорость тяговой лебедки должна быть меньше номинальной .
Из двух отрицательных алгебраических величин больше та, модуль которой меньше. Выходной сигнал сумматора 13, задающего скорость тяговой лебедки, меньшую номинальной, по модулю меньше, а по алгебраической величине больше, чем выходной сигнал задатчика 12 скорости привода тяги. Блок 11 выделения управляющего сигнала привода тяги, являющийся блоком выделения наибольшего сигнала, подключает на вход блока 9 регулирования скорости привода тяги выходной сигнал сумматора 13,обеспечивающего стабилизацию заданной длины тяговых канатов, необходимой для движения ковша на подъем по заданной траектории, при этом скорость привода подъема равна номинальной.
Для разгрузки ковша машинист устанавливает на задатчике 17 положения траектории сигнал, соответствующий зоне саморазгрузки ковша. Происходит ослабление тяговых канатов и разгрузка ковша.
Для опускания ковша машинист устанавливает на выходе задатчика 17 положения траектории сигнал, соответствующий траектории опускания, а на выходе задатчика 10 скорости привода подъема - сигнал, соответствующий вытравливанию подъемных канатов с номинальной скоростью. При опускании ковша выходной сигнал сумматора 13 имеет положительную полярность (т.е., он направлен на наматывание тяговых канатов) и по величине он больше выходного сигнала задатчика 12 скорости привода тяги, т.е. и,э Uf2 . На задатчике 12 скорости привода тяги установлен сигнал, соответствующий вытравливанию ковша
5
0
с номинальной скоростью и, следова- тельно, этот сигнал имеет отрицательную полярность. Блок 11 выделения управляющего сигнала привода гяги подключает на вход блока 9 регулирования скорости привода тяги выходной сигнал сумматора 13, что обеспечивает движение ковша на спуск по Q заданной траектории. Скорость привода подъема при этом равна номинальной .
Формула изобретения
Устройство управления процессом транспортирования ковша драглайна, содержащее датчик длины подъемных канатов, датчик длины тяговых канатов, выход которого подключен к первому входу сумматора, задатчик ско- рости привода подъема, блок регулирования скорости привода подъема, соединенный с двигателем подъемной ле5 бедки, задатчик скорости привода тяги, соединенный с первым входом блока выделения управляющего сигнала привода-тяги, выход которого подключен через блок регулирования скоро-
0 сти привода тяги к двигателю тяговой лебедки, отличающееся тем, что,с целью повышения надежности за счет снижения динамических нагрузок рабочего оборудования при транспортировании ковша, оно снабжено задатчиком положения траектории движения ковша и блоком вычисления заданного значения длины тяговых канатов, причем выход датчика длины подъемных канатов подключен к первому входу блока вычисления заданного значения длины тяговых канатов, к второму входу которого подключен задатчик положения траектории движе5 ния ковша, а его выход соединен с вторым входом сумматора; выход которого подключен к второму входу блока I выделения управляющего сигнала привода тяги, а выход задатчика скорости
Q привода подъема подключен к блоку регулирования скорости подъема.
5
0
Фие.ё
Ґлс.
Зоне
саморелгруу ки
| СПОСОБ АВТОМАТИЧЕСКОГО УЧЕТА ОСНОВНЫХ ПОКАЗАТЕЛЕЙ РАБОТЫ ДРАГЛАЙПА | 0 |
|
SU343043A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для защиты стрелы экскаватора-драглайна | 1979 |
|
SU787562A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
