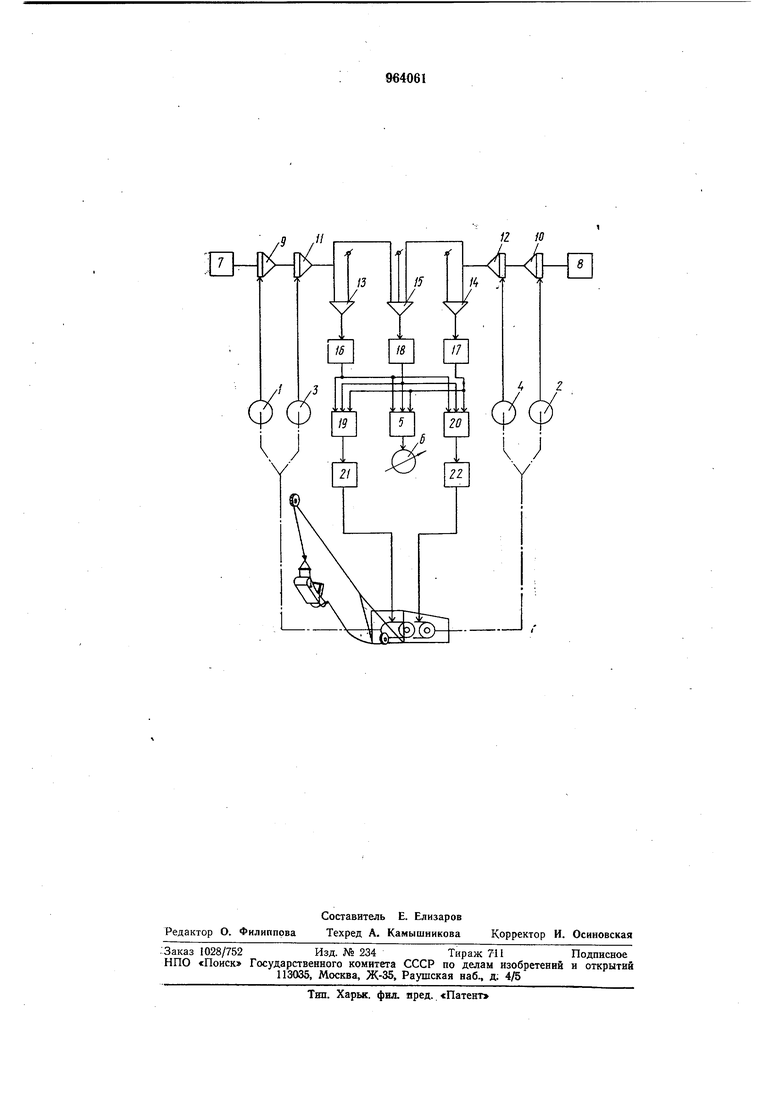
Устройство содержит датчики 1 и 2 скорости движения лебедок тяги и подъема соответственно, датчики 3 и 4 длин тяговых и подъемных канатов соответственно, блок 5 выделення минимального сигнала, индикатор 6, задатчнк 7 маневра тягн, задатчик 8 маневра подъема, интеграторы 9, 10, 11 и 12, сумматоры .13, 14 и .15, блокипамяти 16, 17 и 18, блок 19 формирования сигналов управления привода тяги, блок 20 формирования сигналов управления привода подъема, блок 21 регулирования скорости тяги и блок 22 регулирования скорости подъема.
Датчики 1 и 3 соединены с валом лебедки тягового механизма, а датчики 2 и 4 - с валом лебедки подъемного механизма. Выходы датчиков 1 и 3 подключены соответственно к входам начальных условий интеграторов 9 и 11, соединенных последовательно, вход первого из них соединен с выходом задатчика 7 маневра тяги, а выход последнего подключен к входам сумматоров 13 и 15. Выходы датчиков 2 и 4 подключены соответственно к входам начальных условий интеграторов 10 и 12, соединенных последовательно, вход первого из них соединен -с выходом задатчика 8 маневра подъема, а выход последнего подключен к входам сумматоров 14 и 15. На дополнительные входы сумматоров 13, 14 и 15 подается напряжение постоянного тока. Выходы сумматоров 13, 14 и 15 подключены на входы блоков 16, 17 и 18 памяти соответственно, выходы которых подключены на входы блока 5 выделення минимального сигнала соответственно, и блоков 19 и 20 формирования сигналов управления приводами тяги и подъема. Выход блока 5 выделения минимального сигнала подключен на вход индикатора 6, а выходы блоков 19 и 20 формирования сигналов управления приводами тяги и подъема соответственно на входы блоков 21 и 22 регулирования скорости тяги и подъема.
Устройство работает следующим образом.
На сумматоры 13, 14 и 15 задаются постоянные напряжения, пропор циональные значениям констант, характеризующих границы опасных зон. Во время движения ковша в рабочем пространстве текущие значения длин канатов подъема и тяги и их скоростей поступают на начальные условия интеграторов 9, 10, 11 и 12. Задатчики 7 и 8 маневра тяги и подъема формируют сигналы управления дл.я вывода ковша из аварийной ситуации. Эти сигналы поступают на входы интеграторов 9 и 10, работающих в ускоренном масштабе времени. На интеграторах Ни 12, работающих также в ускоренном масштабе времени, вырабатываются сигналы, пропорциональные будущим значениям длин канатов подъема и
тяги, начиная с текущих значений. Тем самым прогнозируется возможное попадание ковща в опасную зону. Сумматоры 13, 14 и 15 вырабатывают сигналы, пропорциональные расстоянию до опасных зон.
В блоках памяти 16, 17 и 18 формируются сигналы наименьших, за время прогнозирования, расстояний до опасных зон.
При приближении ковша к зоне переподъема с блока памяти 17 и оступает сигнал на блоки 19 и 20 формирования сигналов управления приводами тяги и подъема, которые вырабатывают сигнал на блоки 21 и 22 регулирования скорости тягн и подъема, тем самым осуществляется остановка привода подъема и последующая остановка привода тяги. Аналогичное управление производится и при режиме перетяги. С блока памяти 16 поступает сигнал наблоки 19 и 20 формирования сигналов управления тяги и подъема, которые вырабатывают сигнал на блоки 21 и 22 регулирования скорости тяги и подъема, н
производится остановка привода тяги и последующая остановка привода подъема.
При приближении ковша к зоне растяжки блок памяти 18 вырабатывает сигнал на блоки 19 и 20 формирования сигналов управления тяги и подъема, которые задают программные сигналы управления на блоки 21 и 22 регулирования скорости тяги и подъема. Тем самым движение ковща происходит по заданной внутренней траектории в точку разгрузки ковша.
Устройство позволяет повысить надежность работы экскаватора-драглайна и его безаварийность за счет более полного учета динамики движения конша в рабочем
пространстве.
Формула изобретения
Устройство для контроля положения ковша экскаватора-драглайна по авт. св. № 827709, отличающееся тем, что, с целью повышения надежности экскаватора в ;р.аботе, устройство снабжено блоками формирования сигналов управления приводами тяги и подъема и последовательно соединенными с ними двумя блоками регулирования скорости приводов тяги и подъема, причем входы блоков формирования сигналов управления приводами тяги и подъема соединены с выходами блоков памяти, а выходы блоков регулирования скорости приводов тяги и подъема соединены с приводами тяги и подъема.
Р1сточник информации, принятый во внимание при экспертизе:
1. Авторское свидетельство
СССР № 827709, кл. Е 02 F 3/48, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля положенияКОВшА эКСКАВАТОРА-дРАглАйНА | 1979 |
|
SU827709A1 |
| Устройство защиты стрелы от растяжки ковша экскаватора-драглайна | 1977 |
|
SU777157A1 |
| Способ управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1989 |
|
SU1671801A1 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКОВАТРА-ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543837C1 |
| Устройство для управления приводом механизма поворота экскаватора-драглаина | 1978 |
|
SU905382A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2130998C1 |
| Электропривод лебедки экскаватора-драглайна | 1991 |
|
SU1775832A1 |
| Устройство управления процессом транспортирования ковша драглайна | 1988 |
|
SU1544898A1 |