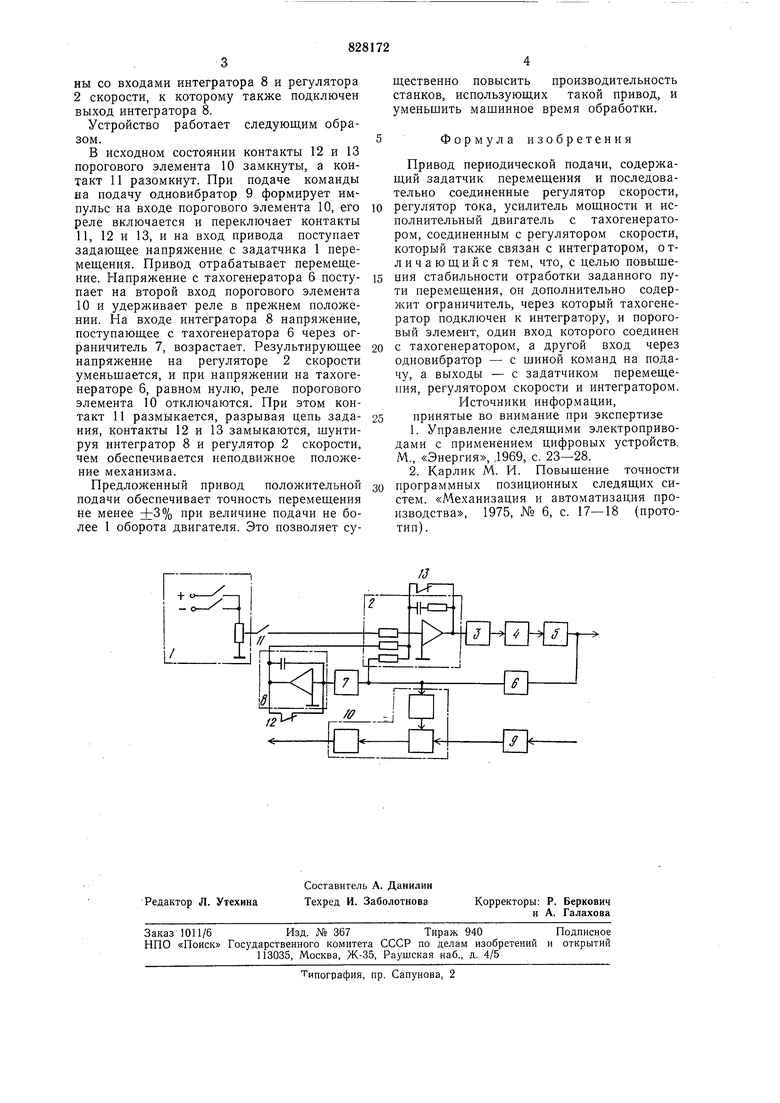
ны со входами интегратора 8 и регулятора 2 скорости, к которому также подключен выход интегратора 8.
Устройство работает следующим образом.
В исходном состоянии контакты 12 и 13 порогового элемента 10 замкнуты, а контакт 11 разомкнут. При иодаче команды на подачу одновибратор 9 формирует импульс на входе порогового элемента 10, его реле включается и переключает контакты 11, 12 и 13, и на вход привода поступает задающее напряжение с задатчика 1 перемещения. Привод отрабатывает перемещение. Напряжение с тахогенератора 6 поступает на второй вход порогового элемента 10 и удерживает реле в прежнем положении. На входе интегратора 8 напряжение, поступающее с тахогенератора 6 через ограничитель 7, возрастает. Результирующее напряжение на регуляторе 2 скорости уменьшается, и при напряжении на тахогенераторе 6, равном нулю, реле порогового элемента 10 отключаются. При этом контакт 11 размыкается, разрывая цепь задания, контакты 12 и 13 замыкаются, шунтируя интегратор 8 и регулятор 2 скорости, чем обеспечивается неподвижное положение механизма.
Предлол енный привод положительной подачи обеспечивает точность перемещения не менее +3% при величине подачи не более 1 оборота двигателя. Это позволяет существенно повысить производительность станков, использующих такой привод, и уменьшить машинное время обработки.
Формула изобретения
Привод периодической подачи, содержащий задатчик перемещения и последовательно соединенные регулятор скорости,
регулятор тока, усилитель мощности и исполнительный двигатель с тахогенератором, соединенным с регулятором скорости, который также связан с интегратором, отличающийся тем, что, с целью повышения стабильности отработки заданного пути перемещения, он дополнительно содержит ограничитель, через который тахогенератор подключен к интегратору, и пороговый элемент, один вход которого соединен
с тахогенератором, а другой вход через одновибратор - с шиной команд на подачу, а выходы - с задатчиком перемещения, регулятором скорости и интегратором. Источники информации,
принятые во внимание при экспертизе
1.Управление следящими электроприводами с применением цифровых устройств, М., «Энергия, ,1969, с. 23-28.
2.Карлик М. И. Повышение точности программных позиционных следящих систем. «Механизация и автоматизация производства, 1975, № 6, с. 17-18 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Устройство для защиты электропривода | 1979 |
|
SU864475A1 |
| Устройство для отбора от кип волокнистого материала | 1985 |
|
SU1258924A2 |
| Следящий электропривод | 1974 |
|
SU607178A1 |
| Регулятор давления для насосной станции магистрального трубопровода | 1979 |
|
SU773585A1 |
| Устройство для регулирования мощности дуговой электропередачи | 1974 |
|
SU559470A1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |
| ПРОГРАММНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ | 1968 |
|
SU231242A1 |
| Устройство для демпфирования колебаний грузозахватного органа крана | 1977 |
|
SU1053443A1 |
/ff
