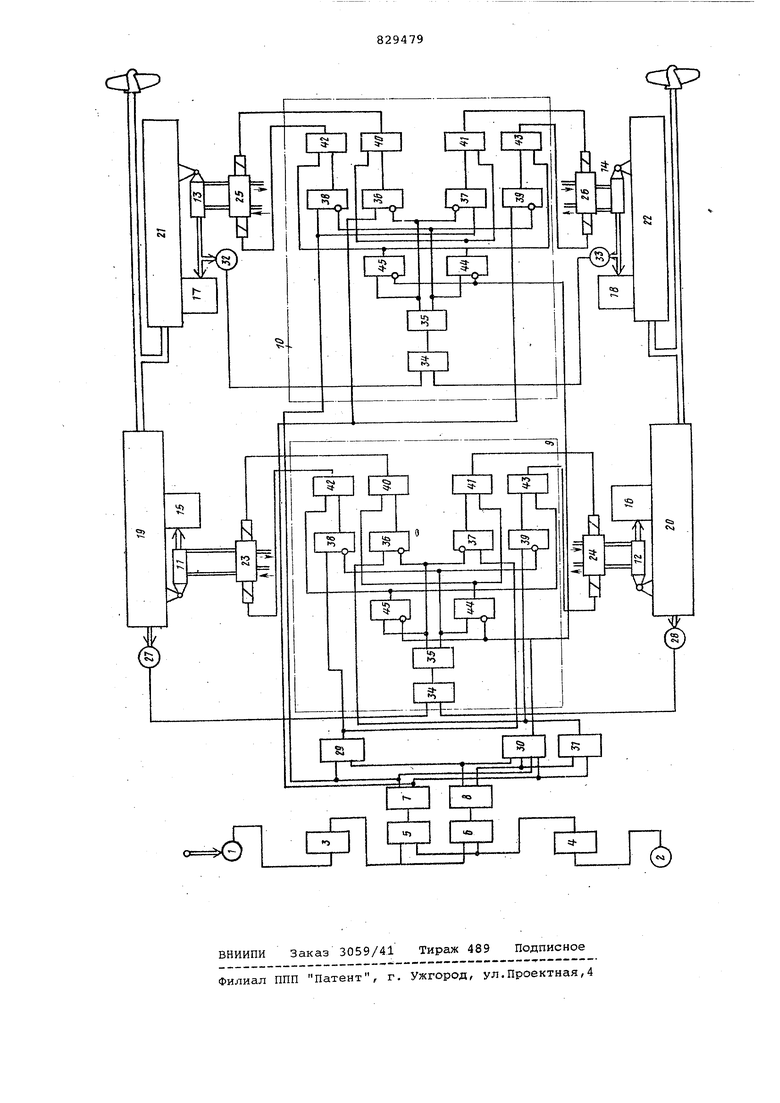
управления исполнительными механизмами 11, 12, 13 и 14 регуляторов 15, 16, 17 и 18 соответственно дизелей 19 и 20 и газотурбийНых двигателей 2 и 22 судовой установки через преобразователи 23, 24, 25 и 26. Датчики 27 и 28 частоты вращения дизелей 19 и 20 подключены к другим входам логического блока 9. Между выходами знакочувствительных элементов 7 и 8 и входами блока 9 включены логические элементы 29, 30 и 31 ИЛИ.
Исполнительные механизмы 13 и 14 снабжены датчиками 32 и 33 обратной связи. Каждый из блоков 9 и 1 выполнен на подключенном на его входе сумматоре 34, включенном последовательно с ним знакочувствительHfOM элементе 35 , - выхода которого подключены к одним из входов элементов 36, 37 и 38, 39 И. Другие входы указанных элементов И соединены с выходами элементов 29 и 31 ИЛИ а их выходы соединены соответственно с одними из входов элементов 40, 41, 42 и 43 ИЛИ. Другие входы элементов 40 и 41 подключены к выходу элемента 44 И, а другие входы элементов 42 и 43 к выходу элемента 45 И. Входы элементов 44 и 45 подключены соответственно к выходам элемента 35 и элемента 31. Другие входы элементов 36, 37, 38 и 39 в блоке 10 подключены к выходам знакочувствительного элемента 7.
Система работает следующим образом.
При перемещении задатчика 1 на йходе блоков 5 и 6 возникает разност сигналов между сигналом от задатчика 1 и датчика 2 скорости судна. Знакочувствительные элементы 7 и 8 имеют два выходных канала, которые пропускают сигнал рассогласования в зависимости от его знака, т.е. В зависимости от того, какой из сигналов от задатчика 1 или датчика 2 больше.Сигнал с выхода элемента 7, сопряженного с блоком 5, имеющим более широкую зону нечувствительности по сравнению с зоной блока 6, поступает на входы блока 10 и через элементы 29 и 31 также на входы блока 9. Сигнал с выхода элемента 8 поступает через элемент 29 и 31 на входы только блока 9. В блоке 9 сигналы от элементов 7 и 8 поступают на входы элементов 36 и 37. Если на инверсных входах этих элементов нет сигнала рассинхронизсщии дизелей 19 и 20, то сигнал с их выхода поступает на управляющие обмотки преобразователей 23 и 24. Преобразователи 23 и 24 подают силовую среду от источника (на чертеже не показан) к исполнительным механизмам 11 и 12, заставляя их выходные штоки изменять настро0ку регуляторов 15 и 16 дизелей 19 и 20 в сторону увеличения частоты их вращения. В блоке 10 сигнлы от элементов 7 и 8 поступают на входы элементов 37 и 38 или на входы элементов. 36 и 39.
При поступлении сигнала на элементы 37 и 38 и отсутствии на их инверсных входах сигнала рассинхронизации исполнительных механизмов 13 и 1 сигнал с выхода элементов 37 и 38 поступает на управлягацие обмотки преобразователей 25 и 26, которые подают силовую среду к исполнительным механизмам 13 и 14, заставляя их выходные штоки изменять настройку регуляторов 17 и 18 в сторону увеличения подачи топлива в двигатели 21 и 22. При отсутствии на инверсных входах элементов 36 и 37 сигнала рассинхронизации механизмов сигнал с их выхода поступает на управляющие обмотки преобразователей 25 и 26, которые подают силовую среду к исполнительным механизмам 13 и 14, заставляя их выходные штоки изменять настройку регуляторов 17 и 18 в сторону уменьшения подачи топлива в двигатели 21 и 22. Работа блоков 9 и 10, связанных с ними механизмов 11, 12 и 13, 14 продолжается до тех пор, пока скорость судна не увеличится (уменьшится) до такой величины, когда сигнал на выходе датчика 2 сравняется на входе блока 5 в пределах его зоны нечувствительности с сигналом от згщатчика 1. При этом прекращается отработка блока 10. Но отработка блока 9 продолжается до тех пор, пока не сравняются сигналы на входе блока 6 в пределах его зоны нечувствительности, которая уже зоны блока 5. Когда это произойдет, отработка блока 9 также прекратится. Разная ширина зоны нечувствительности у блока 5, управляющего двигателями 21 и 22, и блока 6, управляющего дизелями 19 и 20, выбрана для того, чтобы предотвратить перерегулирование двигателей 21 и 22, имеющих меньшую приемитость по сравнению с дизелями, и одновременно более точно отрегулировать скорость движения судна.
Если в процессе отработки блоков 9 и 10 или после отработки происходит рассинхронизация частоты вращения дизелей 19 и 20 или рассинхронизация отработки механизмов 13 и 14, сумматоры 34 блоков 9 и 10, на входы которых подаются сигналы соответственно от датчиков 27, 28 и 32, 33, выдают блокировочно-корректирующий сиЬнал на выходные элементы 36-39 И соответствующих блоков. Если рассогласование между однотипными двигателями возникает в процессе изменения ркорости судна, сигнал с выхода сумматора 34 через энакочувствительный элемент 35 блокирует отработку опережающего исполнительного механизма, запирая через инверсный вход соответствующий элемент 36-39 И до тех пор, пока сигналы на входах элемента 34 не сравняются. Бели рассогласование происходит при установившейся скорости судна, при отсутствии блокирующего сигнала с выхода элемента 30 ИЛИ, сигналы с выхода сумматора 34 через знакочувствительный элемент 35 поступают через входные элементы 40-43 на соответствующие обмотки преобразователей, вызывая тем самым увеличение или уменьшение подачи топлива в двигатель, пока сигналы на входе сумматора 34 не сравняются.
Формула изобретения
Система автоматического дистанционного управления многовальной судовой энергетической установкой, состоящей из работающих на гребной
рал дизелей и газотурбинных двигателей, содержащая блок сравнения, ко.входам которого через фильтры подключены задатчик и датчик скорости, а выходы соединены с выпол. ненными по числу пар однотипных дви гателей логическими блокг ми управления исполнительными механизмами регуляторов газотурбинных двигателей и дизелей, отличающаяся тем, что, с целью экономии
О ресурса установки, система снабжена дополнительным блоком сравнения с зоной нечувствительности, отличной от зоны нечувствительности блока сравнения, и энакочувствительным11
5 элементами, через которые блоки сравнения с более широкой и более узкой зонами нечувствительности соответственно подключены к логическим блокам управления исполнительными
0 механизмами регуляторов газотурбинных двигателей и дизелей. Источники информации принятые во внимание при экспертизе 1. Авторское свидетельство СССР
5 381066, кл. G 05 D 13/34, 02.12.69 (прототип).
dp
ciP
1
f
2J 1
Г--I Liq
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая дистанционная система управления для двигателя внутреннего сгорания | 1980 |
|
SU926341A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД | 2003 |
|
RU2256106C1 |
| Устройство управления многодвигательной энергетической установкой | 1978 |
|
SU779178A1 |
| Устройство автоматического регулирования толщины прокатываемой полосы | 1990 |
|
SU1731321A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2466288C1 |
| Система автоматического и дистанционного управления многодвигательной силовой установкой | 1980 |
|
SU924418A1 |
| Система регулирования диаметра жил на бумагомассной машине | 1986 |
|
SU1472879A1 |
| Регулятор мощности дуговой электропечи | 1984 |
|
SU1264379A1 |
| Адаптивная система управления параллельно работающими дизельными установками | 1984 |
|
SU1183939A1 |
| Система управления высотой хода над грунтом рабочего органа подводного добывающего устройства | 1982 |
|
SU1062114A1 |
r
R
Ca
«V
5
зт
:У
н
.
