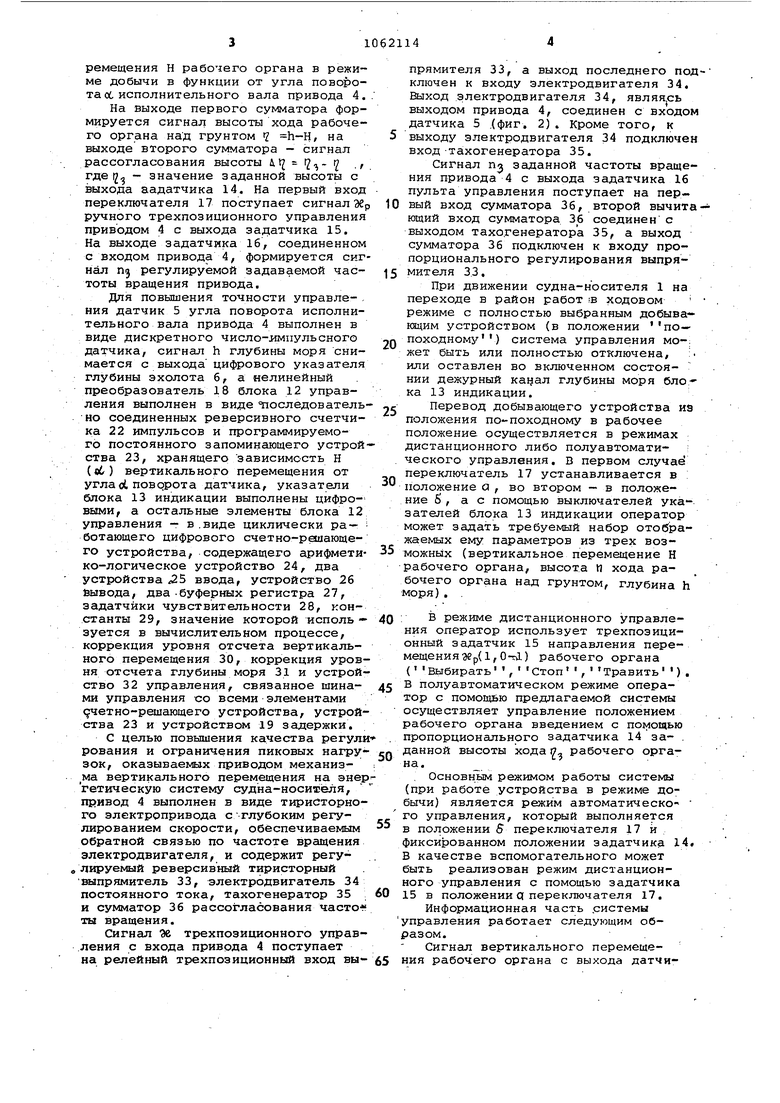
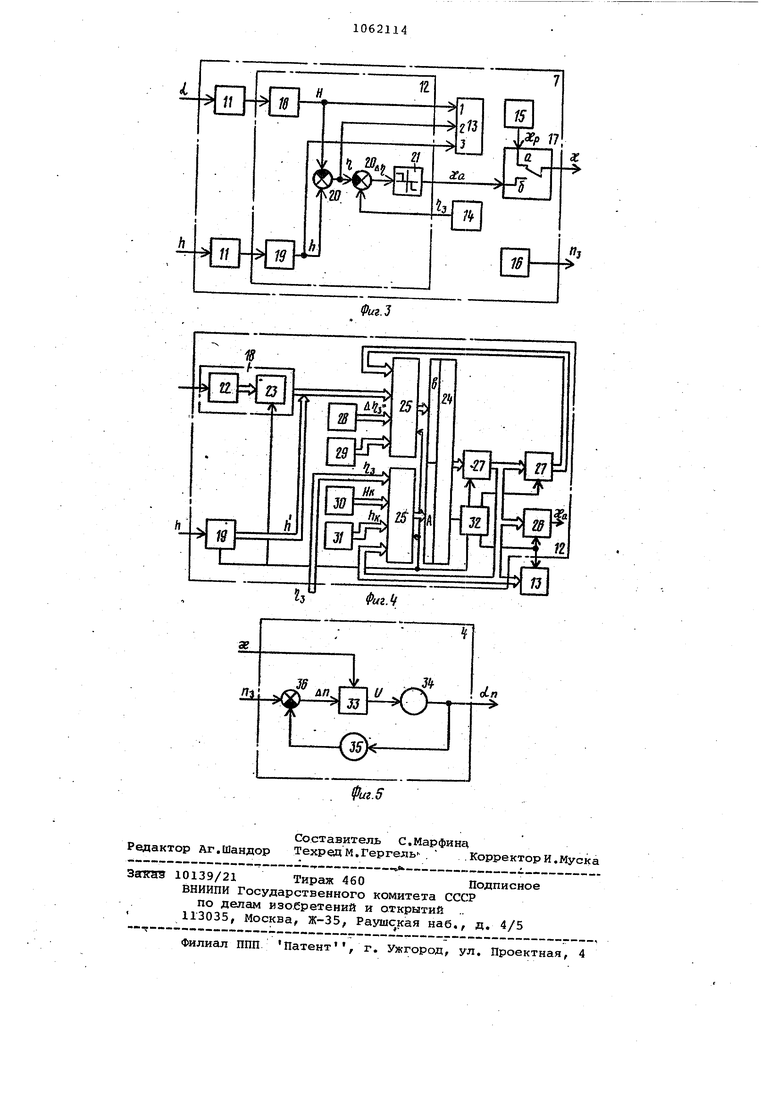
Изобретение относится к судостроению, в частности к системам управления высотой хода над грунтом рабочего органа подводного добывагац го устройства. Известна система управления высотой хода над грунтом рабочего органа подводного добывающего устройства, содержащая надводное судноноситель с силовой установкой, а также имеющий привод механизм верти кального перемещения рабочего органа и блок управления If .. Недостатком этой системы является недостаточная надежность ее в работе. Цель изобретения - повышение .надежности системы в работе, .Цель достигается тем, что сист.ема управления высотой хода над грун том рабочего органа подводного добы вающего устройства, содержащая надводное судно-носитель ;с силовой установкой, а также имеющий привод ме ханизм вертикального перемещения .рабочего opraria и блок управления, снабжена эхолотом, датчиком угла поворота вала привода механизма вар тикального перемещения, задатчиком ВЕхгсоты, задатчиком частоты вращения привода, задатчиком направления перемещения рабочего органа и подключенным к последнему переключатет. лем режима работы, а блок управления включает последовательно соеди нённые нелинейный преобразователь, первый сумматор, второй сумматор и трехпозиционный релейный элемент, подключенный к переключателю режима работы, а также устройство регулиру мой временной задержки, выход которого подключен- к первому сумматору а вход - к эхолоту, привод механйзма вертикального перемещения рабочего органа включает пойледовательн соединенные третий сумматор, реверсивный тиристорный выпрямитель, эле тродвигатель постоянного тока и тах генератор, выход которого подключен к третьему сумматору, при этом выхо датчика угла поворота вала привода механизма вертикального перемещения соединен с входом нелинейного преоб разователя, выход задатчика высоты подключен к входу второго сумматора выход эадатчика частоты вращения пр вода связан с входом третьего сумматора, а выход переключателя режим работы - с входом реверсивного тиристорного выпрямителя. На фиг, 1 приведено псэдвЬдйое добывающее устройство и расположени основных элементов системы управления на судне-носителе, общий вид; на фиг, 2 - схема системы управлени высотой хода над грунтом рабочего органа; на фиг, 3 - схема пульта управления;: на фиг, 4 - схема блока управления пульта; на фиг. 5 - схема привода. Система управления содержит судно-носитель 1, оборудованное силовой установкой, и добывающим устройством рабочий орган 2 которого представляет собой движущийся непрерывный гибкий несущий элемент конвейерного типа, оснащенный разнообразными ра-бочими приспособлениями для добычи доьных биологических. продуктов и полезных ископаемых, В состав системы управления входят также механизм 3 вертикального перемещения рабочего 2, снабженный приводом 4 и датчиком 5 угла поворота .привода механизма вертикального перемещения, эхолот б и пульт 7 управления . Механизм 3 вертикального перемещения представляет собой лебедку, на барабан которой намотана гибкая механическая связь 8, второй конец, которой закреплен к вращающемуся при движении рабочего органа.барабану 9 «натяжения, .который.с помощью связи 8 может перемещаться по .горизонтальным направляющим 10, ... . . Выходы датчика 5 иэхолота 6 coef динены соот,ветстввнно с первым и вторым входами пульта 7 управления, . Выходы пульта 7 управления, на-кото рых формируются сигналы Эв трехпозиционного управления приводом и регулируемой задаваемой частоты nj его вращения, подключены к соответствующим входам привода 4, выход которого соединен с входом механизма 3 вертик,ального перемещения и входом датчика 5, Пульт 7 управления содержит устройства И согласования сигналов h эхолота и датчика угла с6 поворота, блок 12 управления, блок 13 индикации с тремя управляемыми по вызову оператора указ ателями:вертикального перемещения,, высоты хода рабочего органа и глубины моря, а также пропорциональный задатчик 14 высоты, трекпозиционный задатчик 15 направления перемсацения рабочего органа, . пропорциональный задатчик 16 частоты вращения привода и переключатель 17 режима ргсботы. . в состав блока 12 управления входят нелинейный преобразователь 18, У|:тройство 19 регулируемой временной задержки сигнала эхолота 6, два cy a«Iaтopa 20 и трехпозиционный релеьйний элемент 21 с регулируемой по ширине зоной нечувствительности, на выходе которого формируется сигналэСа .управления приводом 4, поступающий н второй вход переключателя 17, Налинейный преобразователь 18 воспро-, изводит зависимость вертикального пе ремещения Н рабочего органа в режиме добычи в функции от угла поворота оС исполнительного вала привода 4..
На выходе первого сумматора формируется сигнал высоты хода рабочего органа над грунтом 7 h-H, на 5 выходе второго сумматора - сигнал рассогласования высоты i 7i- ./ . где 1 - значение заданной высоты с выхода аадатчика 14. На первый вход переключателя 17 поступает сигнал Эбр 10 ручного трехпозиционного управления приводом 4 с выхода за,цатчика 15, На выходе задатчика 16, соединенном с входом привода 4, формируется сигнал nj регулируемой задаваемой час- 5 тоты вращения привода.
Для повышения точности управле- , ния датчик 5 угла поворота исполнительного вала привода 4 выполнен в виде дискретного число-ямпульсного датчика, сигнал h глубины моря снимается с выхода цифрового указателя глубины эхолота б, а нелинейный преобразователь 18 блока 12 управления выполнен в виде последователь- -с но соединенных реверсивного счетчика 22 импульсов и программируемого постоянного запоминающего устройства 23, хранящего зависимость Н (вб-) вертикального перемещения от угласт поворота датчика, указатели 30 блока 13 индикации выполнены цифровыми, а остальные элементы блока 12 управления - в.виде циклически ра- ботающего цифрового счетно-решающего устройства, содержащего арифмети- 35 ко-логическое устройство 24, два устройства 5 ввода, устройство 26 йывода, два-буферных регистра 27, задатчйки чувствительности 28, константы 29, значение которой исполь - 40 зуется в вычислительном процессе, коррекция уровня отсчета вертикального перемещения 30, коррекция уровня отсчета глубины моря 31 и устройство 32 управления, связанное шина- 45 ми управления со всеми элементами 9четно-решающего устройства, устройства 23 и устройством 19 задержки,
С целью повышения качества регули . рования и ограничения пиковых нагру- CQ зок, оказываемых приводом механиз- : ма вертикального перемещения на энер гетическую систему судна-носителя, привод 4 выполнен в виде тиристорного электропривода с;глубоким регулированием скорости, обеспечиваемым обратной связью по частоте вращения электродвигателя, и содержит регулируемый реверсивный тиристорный выпрямитель 33, электродвигатель 34 постоянного тока, тахогенератор 35 60 и сумматор 36 рассогласования часто ты вращения.
Сигнал % трехпозиционного управления с входа привода 4 поступает на релейный трехпозиционный вход вы- 65
прямителя 33, а выход последнего подключен к входу электродвигателя 34, йлход электродвигателя 34, являя сь выходом привода 4, соединен с входом датчика 5 .(фиг. 2) . Кроме того, к выходу электродвигателя 34 подключен вход-тахогенератора 35,
Сигнал nj заданной частоты вращения привода 4 с выхода задатчика 16 пульта управления поступает на первый вход сумматора 36, второй вычитающий вход сумматора 36 соединен с выходом тахо.генератора 35, а выход сумматора 36 подключен к входу пропорционального регулирования выпрямителя 33,
При движении судна-носителя 1 на переходе в район работ IB ходовом режиме с полностью выбранным добывающим устройством (в положении по- походному) система управления мо-; жет быть или полностью отключена, : или оставлен во включенном состояНИИ дежурный глубины моря бло ка 13 индикации.
Перевод добывающего устройства иэ положения ПО походному в рабочее положение осуществляется в режимах дистанционного либо полуавтоматического управления, в первом случае переключатель 17 устанавливается в : положение а, во втором - в положение б, а с помощью выключателей указателей блока 13 индикации оператор может задать требуемый набор отображаемых ему параметров из трех возможных (вертикальное перемещение Н рабочего органа, высота И хода рабочего органа над грунтом, глубина h моря), .
; В режиме дистанционного управления оператор использует трехпозиционный задатчик 15 направления перемещения эСр(1,Ота) рабочего органа (Выбирать,Стоп,Травить), В полуавтоматическом режиме оператор с помощью предлагаемой системы осуществляет управление положением рабочего органа введением с помощью пропорционального задатчика 14 за- . данной высоты ,. рабочего органа.
Основным режимом работы системы (при работе устройства в режиме добычи) является режим автоматического управления, который выполняется в положении 6 переключателя 17 и фиксированном положении задатчика 14, В качестве вспомогательного может быть реализован режим дистанционного управления с помощью задатчика 15 в положенииQ переключателя 17,
Информационная часть .системы управления работает следующим образом.
Сигнал вертикального перемещения рабочего органа с выхода датчика 5 угла поворота вала механизма 3 вертикального перемещения в виде число-импульсного кода через устройство 11 согласования поступает на вход счетчика 22. Состояние выходов счетчика соответствует углу поворота датчика 5 в двоичном коде,. Значение вертикального перемещения н рабочего органа в двоично-десятичном коде хранятся в ячейках памяти устройства 23 по адресам, код которых соответствует углу ( поворота для данного значения перемещения Такой принцип позволяет реализовать любую зависимость н f (ot) , при подаче на адресные входы устройства 23 с выхода счетчика 22 кода угла поворота на выходе устройства -23 .считывается сигнал вертикального перемещения Н в двоично-десятичном коде, который поступает на вход устройства 25.
Сигнал глубины моря h в виде дво ичйо-десятичного кода с выхода Цифрового указателя глу бины эхолота б через устройство 11 согласования поступает на вход устройства 19 ре- гулируемой временной задержки,осуществляеющего привязку измеряемой глубины моря к местоположению нижней части рабочего органа во время движения судна в добывающем режиме.
Устройство 32 управления управляет работой элементов счетно-решающего устройства, организуя последовательный ряд вычислений в соответствии с алгоритмом. При этом используются сигналы н и h , а также сигналы задатчиков высоты , коррекции уровней отсчета вертикального перемещения Нц; и глубины моря h регулируемой ширины зоны нечувстви тельности ii, которые через устройство 25 поступают на входы устЕ5ойства 24.
В результате вычислений с помощью устройства 24 определяются вертикальное перемещение рабочего органа -Е глубина Моря высота хода рабочего органа над ; грунтом h-Н; рассогласование высоты 12 1 j знак пре.вЕлиения, рассогласования высоты -Л г относительно заданной ширины зоны
нечувствительности
singii2 sing (/Л / ). Полученные в ходе реализации алгоритма значения величин h, Н и tj передаются в блок 13 индикации,
По значению sing г с помощью уст ройства 24 и 26 в соответствии с алгоритмом на выходе устройства 16 формируется релейный трехпозиционный управляющий сигнал К(1,0 -1) который поступает на второй вход переключателя 17. Реализация алгоритма циклически повторяется, что
обеспечивает постоянный контроль всех параметров системы и своевременную выдачу управляющих воздействий на исполнительный привод,
Регулиров-анием с помощью задат5 чика 28 ширины зоны нечувствитель й| достигается необходимая точность управления при обеспечении требуемой устойчивости процессов регулирования высоты хода рабочего
10 органа над грунтом.
Таким образом, на выходе переключателя 17 режима работы как в режиме дистанционного управления, так : и в полуавтоматическом и автомати15 ческом режимах, формируется сигнал трехпозиционного управления ЭС -(1,0, -1).- направления перемещения рабочего органа (Выбирать,Стоп, Травить) с регулируемой шириной
0 зоны нечувствительностий -в канале , обратной свя&и.
Сигнал Э управления с выхода пульта 7 управления (фиг. 2. и 3) поступает на вход привода 4, который
25 выполнен в виде тиристорного электропривода постоянного тока с глубоким регулированием скорости, обеспечи- ваемым обратной связью по частоте вращения электродвигателя 34,реализуемой с помощью тахогенератора 35. Пропорциональный задатчик 16 частоты вращения устанавливается на пульте 7 управления. С его помощью осуществляется установка заданной скорости отработки привода 4. Сигнал..
nj поступает на вход сумматора 36, на второй вычитающий вход которого подается сигнал обратной связи по частоте вращения привода. На выходе сумматора 36 формируется сигнал
0 рассогласования частоты вращения U - -п ,
.1 сигнал эе управляет включением pe-t версивного выпрямителя 33, а сигнал дп поступает на вход пропорционального ред улирования выпрямителя и используется в канале регули-. рования его выходного напряжения U, управляющего исполнительным электро.двигателем 34, причем singff sing36.
0 Канал пропорционального регулирования выпрямителя 33 обеспечивает оптимальный выход привода заданную регулируемую скорость отработки с ограничением токовых нагрузок,
5 оказываемых электроприводом на бортовую сеть судна-носителя.. С помощью пропорционального задатчика 16 пульта управления устанавливается необходимая для заданной скорости движе-.
0 ния судна и рельефа дна скорость отработки привода 4, обеспечивающая точное И устойчивое управление высотой хода рабочего органа. Привод 4 управляет углом поворота барабана 5 механизма 3 вертикального перемещения, а, тем сакели, и длиной вытравленной части гибкой механическсй связи 8 - положением барабана 9 напряжения на направляющих 10 а слёдова-г тельноу вертикальным перемещением Н и высотой хода рабочего органа 2 - нижней части движущегося гибкого несущего элемента.. . Основными преимуществ 1ми предлагаемой системы управления являются по«
вышенная надежность функционирования системы и высокая живучесть управления, обусловленные отсутствием подводных датчиков и исполнительных . механизмов автономностью и раДио нальной структурой системы с реализацией как автсянатического, так и .;папуава о14атического, а также дистан- « ционного способов управления. 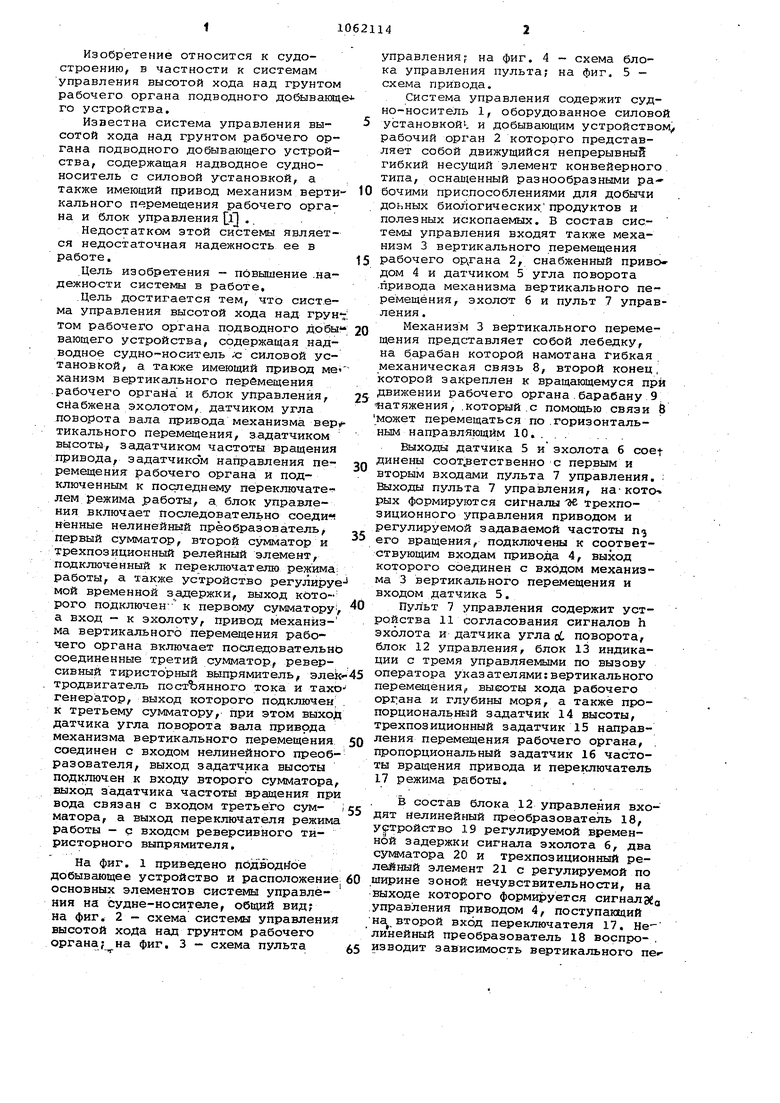
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| ПЛАВУЧАЯ ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2173280C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| Система управления многовальной судовой силовой установкой | 1976 |
|
SU612849A1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1988 |
|
SU1601020A1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ |ХОДА НАД ГРУНТОМ РАБОЧЕГО ОРГАНА ПОДВОДНОГО ДОБЫВАЮЩЕГО УСТРОЙСТВА, содержздая надводное судно-носитель с силовой установкой, а также имеющий привод механизм вертикального перемещения ра:бочего органа и блок .управления, отличающаяс я тем, что, с целью повышения надежности ее в работе, она снабжена эхолотом, датчиком угла поворота вала привода механизма вертикального перемещения, задатчиком высоты, задатчйком частоты вращения приво.да, задатчиком направления перемещеjHHH рабочего органа и подключенным к последнему переключателем режима работы, а блок управления включает последовательно соединенные нелинейный преобразователь, первЫй сумматор, второй сумматор и трехпозиционный релейный-злемент, подключенный к переключателю режима работы, а также устройство регулируемой временной задержки, выход которого подключен к первому сумматору, «а вход к эхолоту, привод механизма вертикального перемещения рабочего органа включает последовательно соединенные третий сумматор, реверсивный тйристорный выпрямитель, электродвигатель постоянного тока и тахогенератор, выход которого подключен к Дретьему сумматору, при этом выход дат(Л чика угла поворота вала при вод а .механизма вертикального перемещения со-г единен с входом нелинейного преобра зователя, выход задатчика высоты . подключен к входу второго суммато- : ра, выход задатчика частоты враще- ; ния привода связан с входом третьего сумматора, а выход переключателя о режима работы - с входом реверсивно OJ го тиристорного выпрямителя. KD
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР ,№ 644432, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
