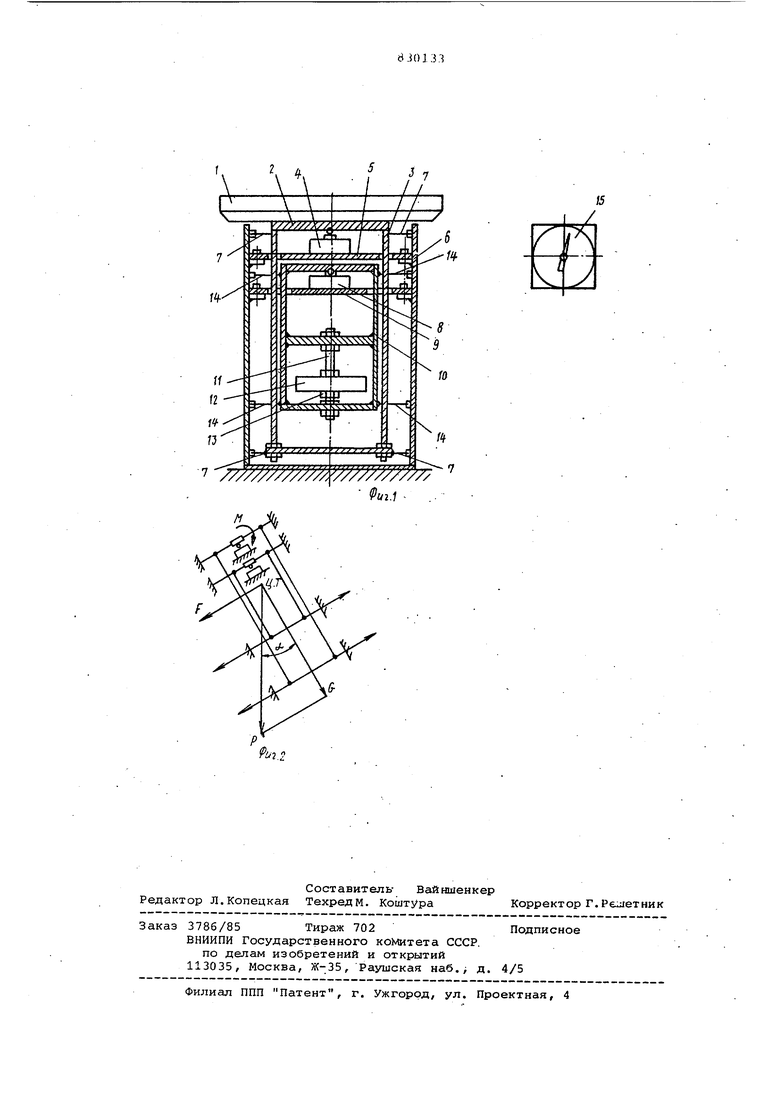
укрепленной на верхней 2, прострг1нственной рамы 3, охватывающей силонзмерительный датчик 4 измеряемой массы, установленный на основании 5. Рама 3 зафиксирована в корпусе б гибкими по вертикали элеманми-отруяками 7. Внутри рамы 3 расположен силоизмернтельный датД1к 8 образцовой массы, опирающийся на осТювание 9. Датчик 8 охвачен нагрузочной пространственной рамой 10, в которой на тяге 11 расположен образцовый груз 12 таким образом, что центр тяжести рамы находится в определенном месте. Тяга 11 снабжена регулятором 13 положения центра тяжести и имеет метки положения груза 12. в зависимости от номинального значения измеряемой массы. Рама 10 зафиксирована в корпусе б гибкилш струнками 14. Для фиксации результатов измерения используется индикатор 15. Датчики 4 и 8 подключены к измерительной схеме (не показана), которая вычисляет отношение сигналов датчиков измеряемой и образцовой массы.
При помещении на платформу 1 изме ряемого груза центры тяжести рам 3 и 10 совместятся и произойдет нагруж ние датчиков 4 и 8, сигнал с которых поступает к измерительной схеме, а результат измерения фиксируется индикатором 15. При наклоне весового устройства на угол об сила веса Р разлагается на составляющие силу G, направленную вдоль оси устройства и воспринимаемую датчиками, и силу F, перпендикулярную этойоси и созддающу вращающий момент. Этот момент воспринимается струнками 7 и 14 и компенсируется -моментом, равным силе натяжения струнок на плечо образуемое расстоянием от точки приложения нагрузки до плоскости нижних фиксирующих струнок. При изменении величины номинальной массы изменится положение центра тяжести пространственной рамы грузоприемной платформы. Для того, чтобы центры тяжести рам совпадали, соответствующий номинальный массе груз 12 образцовой массы с помощью регулятора 13 на тяге 11
устанавливается таким образом, что центр тяжести, рамы образцового груза смещается в ту же сторону , что и центр тяжести рамы грузоприемиой платформы, и на ту же величину. Например, для поднятия центра тяжести груз располагается ближе к верхней перемычке пространственно рамы, для опускания, ближе к нижней перемычке, на которой сделаны метки положения груза 12 при различном номинальном значении взвешиваемой .массы.
Формула изобретения
Весовое устройство, содержащее грузоприемную платформу и образцовый груз, упруго связанные с корпусом и опирающиеся на силоизмерильные датчики, подключенные к индикатору, отличающееся тем, что, .с целью повышения ..ТОЧНОСТИ взвешивания, в него введены две размещенные одна внутри другой пространстве-ные рамы, связанные с корпусом гибкими элементами, на внешней из которых установлена грузоприемаая платформа, а на внутренней с возможностью регулирования по высоте установки образцовый груз, причем, пространственные рамы закреплены на корпусе так, что их центры тяжести при ненагруженных весах расположены ниже точек приложения нагрузки на датчики, при этом отношение расстояния от точки приложения нагрузки на датчик до центра тяжести к расстоянию от той же точки до плоскости нижних гибких элементов, связываюLUHX внвлнюю пространственную раму с корпусом, равно отношению соответствующих расстояний внутренней пространственной рамы.
Источники информации, принятые во внимание при экспертизе
1.Щедровицкий С.М.Техника измерения массы . М. , .Стандартгиз, 1966, с. 263.
2.Авторское свидетельство СССР № 451918, кл. G .01 G 19/22, 1973 (прототип) .
IS
Vf
| название | год | авторы | номер документа |
|---|---|---|---|
| Весодозирующее устройство | 1977 |
|
SU691695A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ, ЗАЩИЩЕННЫЕ ОТ УДАРНЫХ ВОЗДЕЙСТВИЙ ТРАНСПОРТИРУЕМОГО ГРУЗА | 2003 |
|
RU2247335C1 |
| Платформенные рычажные весы | 1984 |
|
SU1339634A1 |
| Весовое устройство | 1989 |
|
SU1770767A1 |
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ КОНВЕЙЕРНЫХ ВЕСОВ | 2005 |
|
RU2289798C1 |
| Конвейерные весы | 1978 |
|
SU798498A1 |
| ВЕСОВОЙ ПОРЦИОННЫЙ ДОЗАТОР | 1990 |
|
RU2018789C1 |
| Устройство для взвешивания | 1989 |
|
SU1732174A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2001 |
|
RU2193759C1 |
| Весоизмерительное устройство | 1987 |
|
SU1500844A1 |