Изобретение относится к весоизмерительной технике и предназначено для взвешивания горной массы при ее транспортировании ленточными конвейерами, преимущественно на горнодобывающих предприятиях, в условиях присутствия на конвейерной ленте крупнокуcковатого груза при высокой скорости ленты.
Все известные конвейерные весы содержат грузоприемный узел в виде грузоприемной платформы с одной или несколькими роликоопорами, выполняющий основную функцию весов - преобразование массы транспортируемого груза, находящегося на измерительном участке весов, в пропорциональный электрический сигнал датчиков силы, входящих в состав грузоприемного узла.
Грузоприемная платформа обычно взаимодействует с двумя датчиками силы, а ее пространственная ориентация на датчиках выполняется различными способами - с помощью плоскопараллельных пружин, рычагов, струнок и так далее, при этом платформа в процессе измерения веса груза имеет одну степень свободы - по оси нагружения датчиков.
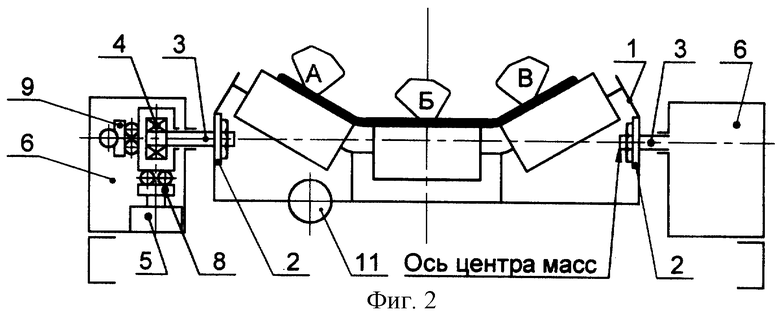
Лента конвейера является основным элементом передачи массы груза через ролики и узлы платформы на датчики силы. Фактически лента всегда взаимодействует с роликами так, как изображено на фиг.1, откуда видно, что в процессе всегда присутствует параметр Е, определяющий динамику наката груза на ролики платформы. В точке Р кинетическая энергия кусковатого груза А, определяемая весом куска и скоростью ленты, переходит в ударное воздействие на узлы платформы и датчики силы, это воздействие еще сильнее сказывается со стороны боковых роликов. Неоднородности ленты - склейки, склепки, заплаты - также вносят свою составляющую в отрицательную динамику процесса. Нужно отметить, что на конвейерах горнорудных предприятий, в частности, на роторных экскаваторах, вес отдельных кусков груза достигает десятков килограмм при скорости ленты до 5 м/сек.
Таким образом, в полезном сигнале о весе груза в известных конструкциях конвейерных весов всегда присутствует ударная динамическая составляющая, искажающая полезную информацию, снижающая точность измерения веса и сокращающая ресурс работы механических узлов и датчиков силы.
В известной конструкции конвейерных весов (авторское свидетельство СССР №1832903, класс G 01 G 11/04, прототип) грузоприемной платформе придана вторая степень свободы - в процессе измерения веса груза платформа может качаться в поперечной плоскости конвейера относительно оси центра масс. Такая установка платформы существенно снижает динамику удара кусковатого груза, так как при накате куска груза на ролики платформа отклоняется по ходу ленты, снимая с механических узлов и датчиков силы кинетическую энергию удара. После прохождения куска реакция ленты восстанавливает исходное состояние платформы.
Известная конструкция имеет ряд недостатков.
1. Верхний и нижний направляющие узлы, обеспечивающие вертикальное движение стоек, отнесены от оси приложения сил на стойках - подшипниковых узлов - на радиусы удаления, и в этих узлах при работе весов появляется трение с нелинейным коэффициентом, зависящим от текущей массы груза.
2. Из фиг.1 видно, что на поверхности контакта ленты с роликом во время движения ленты всегда присутствует сила трения М, которая создает моменты сил трения, опрокидывающие вывешенную по оси центра масс платформу, причем моменты сил трения на роликах, расположенных выше оси центра масс, опрокидывают платформу по ходу ленты, а на роликах ниже оси центра масс - в обратном направлении.
Для компенсации этих моментов в известной конструкции предусмотрена регулировка совмещения центра масс платформы с осью ее вращения при раскрепленных положениях обойм и корпусов, что достаточно просто выполняется в статическом положении платформы при остановленной ленте конвейера, но создает трудности для регулировки при движении ленты, когда и появляется сила трения М, в свою очередь, зависящая от массы текущего груза и, во времени, от состояния ленты. Нелинейный характер сил трения в узлах стоек влияет на точность и стабильность работы конвейерных весов, а наличие радиусов удаления узлов стоек от оси вращения платформы создает в этих узлах повышенные моменты сил трения, что неблагоприятно влияет на надежность механических узлов.
Цель изобретения - повышение точности, стабильности и надежности работы конвейерных весов, защищенных от ударных воздействий транспортируемого груза.
Указанная цель достигается иным, по сравнению с прототипом, взаимодействием стоек с датчиками силы, размещением стоек в корпусах и принципом стабилизации пространственного положения грузоприемной платформы.
Существенные отличия с прототипом заключаются в следующем.
1. Каждая стойка свободно и подвижно опирается через опору скольжения на грузоприемный элемент датчика силы, что предохраняет датчик силы от появления вредных боковых нагрузок.
2. Каждая стойка имеет подвижность по оси нагрузки между тремя самоцентрирующимися опорами скольжения. Одна опора размещена на торцевой поверхности стойки на оси поворота валов, две других размещены по бокам стойки на уровне оси поворота валов, а в опорах устанавливается рабочий зазор. По сравнению с прототипом сократилось количество опор, удерживающих стойки, исчезла нелинейность коэффициента трения, так как опоры размещены в одной плоскости с осью центра масс платформы, значительно снизился коэффициент трения в опорах за счет их сокращения и наличия в них рабочего зазора, так как в рабочем контакте с двумя стойками всегда могут находиться только три опоры - одна центральная в одном из корпусов и в каждом корпусе одна из боковых. Самоцентрирующаяся конструкция опор снимает возможность затира в них стоек и, дополнительно, компенсирует неточности изготовления.
3. Для устранения влияния на платформу сил трения между движущейся лентой конвейера и поверхностями роликов на грузоприемной платформе, со стороны набега ленты, установлен контргруз ниже ее центра масс, то есть платформа искусственно опрокинута в сторону набега ленты, а ее вертикальное положение восстанавливается гибкой стрункой, закрепленной одним концом на боковом откосе платформы выше ее центра масс, а другим концом на ставе конвейера и параллельно ему.
Масса контргруза устанавливается такой, чтобы создаваемый им момент опрокидывания платформы в сторону набега ленты компенсировал обратный момент от силы трения между лентой и поверхностями роликов платформы.
Для пояснения сущности изобретения представлены графические материалы.
На фиг.1 изображено реальное взаимодействие ленты конвейера c любым из роликов грузоприемной платформы при движении ленты с кусковатым грузом.
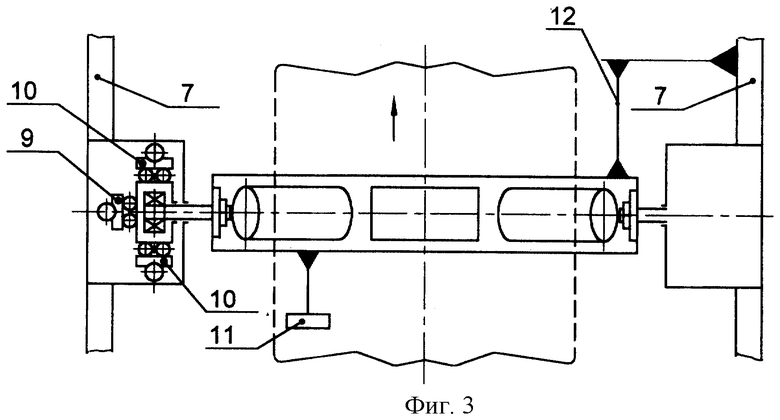
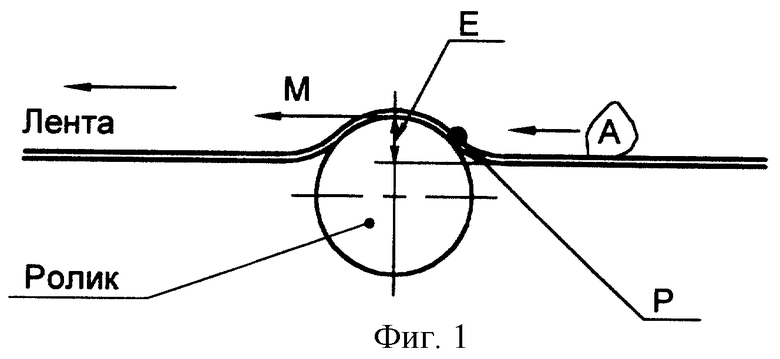
На фиг.2 и 3 изображены соответственно фронтальная и вертикальная проекции однороликовой грузоприемной платформы заявляемых конвейерных весов.
Функционирование заявляемых конвейерных весов происходит следующим образом.
Давление массы груза (нетто) и ленты конвейера (тара) передается на датчики силы через грузоприемную, например, однороликовую платформу 1 на скрепленные с ее боковыми откосами обоймы 2, в которых своими внутренними концами закреплены валы 3. Наружные концы валов 3 закреплены в самоцентрирующихся подшипниковых узлах стоек 4.
Места крепления обойм 2 на платформе 1 конструктивно находятся на одном уровне так, чтобы при закреплении в обоймах 2 валов 3 оси валов разместились на одной прямой в поперечной плоскости конвейера и параллельно ему, причем на этой же прямой находится конструктивно установленный центр масс платформы 1.
Стойки 4 размещены вместе с датчиками силы 5 в корпусах 6, установленных на хребтовых балках 7 става конвейера. Каждая стойка 4 опирается на грузоприемный элемент датчика силы 5 через опору скольжения 8, установленную между нижней плоскостью стойки и плоской поверхностью грузоприемного элемента датчика силы. Опора скольжения выполнена, например, на плоском шариковом сепараторе (аналог - шариковый сепаратор опорного подшипника).
Подвижность каждой стойки 4 по оси нагрузки обеспечивается ее размещением между тремя самоцентрирующимися опорами скольжения - одной осевой 9 и двумя боковыми 10.
Осевая опора 9 контактирует с торцевой поверхностью стойки, и ее центр размещен на оси поворота валов 3, две боковые опоры 10 контактируют с боковыми сторонами стойки, и их центры размещены на уровне оси поворота валов 3 в продольной плоскости конвейера, совпадающей с осью нагрузки стоек.
На фиг.2 и 3 приведен пример выполнения самоцентрирующихся опор скольжения 9 и 10. Из иллюстраций видно, что плоские шариковые сепараторы описанного выше типа размещены соответственно между торцевой и боковыми поверхностями стоек и пластинами, свободно зафиксированными на поверхности шариков, путем частичного заглубления шариков в наружную поверхность пластин, а сами шарики закреплены на внутренних поверхностях корпусов 6 в указанных выше местах. В опорах скольжения 9, 10 изначально устанавливается достаточно малый (0,15...0,3 мм) рабочий зазор.
Представленная фиксация стоек, являющихся основными узлами, удерживающими платформу в заданном пространственном положении, позволяет стойкам занимать в опорах, за счет шариков и рабочих зазоров, оптимальное положение, снимающее возможность появления в опорах 9, 10 затиров и снижающее общий коэффициент трения.
Наличие в стойках 4 самоцентрирующихся подшипниковых узлов, в которых закреплены валы 3, кроме основной функции - обеспечения свободного качания платформы, устраняет возможную несоосность валов 3, возникающую в процессе изготовления или монтажа весов.
Для устранения влияния на грузоприемную платформу 1 сил трения между движущейся лентой конвейера и поверхностями роликов на платформе со стороны набега ленты и ниже оси центра масс платформы установлен контргруз 11, а исходное положение платформы восстанавливается гибкой стрункой 12, например, металлическим тросом ⊘ 03...4 мм, закрепленным между платформой 1 и ставом 7 со стороны схода ленты выше центра масс платформы и параллельно отаву.
Маcca контргруза 11 устанавливается такой, чтобы создаваемый им момент опрокидывания платформы в сторону набега ленты компенсировал обратный момент от сил трения между лентой и поверхностями роликов платформы при любом состоянии ленты (разная степень натяжения, наличие неоднородноcтей на ленте и другое).
Нетрудно видеть, что сохранена подвижность платформы при накате кусковатого груза, а возврат платформы в исходное положение, в отличие от прототипа, обеспечивается не только реакцией ленты, но и влиянием контргруза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерные весы | 1982 |
|
SU1242717A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ КАЛИБРОВКИ КОНВЕЙЕРНЫХ ВЕСОВ | 2004 |
|
RU2361182C2 |
| Конвейерные весы | 1990 |
|
SU1735723A1 |
| Конвейерные весы | 1984 |
|
SU1204951A1 |
| Конвейерные весы | 1976 |
|
SU714160A1 |
| Конвейерные весы конвейеров прямого и реверсивного хода | 2016 |
|
RU2625042C1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2002 |
|
RU2232979C2 |
| РОЛИКООПОРА ДЛЯ ЛЕНТОЧНОГО КОНВЕЙЕРА | 2009 |
|
RU2400418C1 |
| Автоматические конвейерные весы | 1987 |
|
SU1548670A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2005 |
|
RU2289797C1 |
Изобретение относится к весоизмерительной технике, преимущественно для горнодобывающих предприятий, при транспортировании ленточными конвейерами крупнокусковатого груза. Устройство содержит поворотную в поперечной плоскости конвейера грузоприемную платформу, качающуюся относительно оси своего центра масс в двух валах. Валы размещены на одной прямой параллельно конвейеру и скреплены внутренними концами с боковыми откосами платформы, а наружными - с подшипниковыми узлами двух стоек, размещенных в двух корпусах, установленных соответственно по бокам ленты конвейера. Каждая стойка нижней плоскостью через опору скольжения опирается на датчик силы. Подвижность стойки по оси нагрузки датчика силы обеспечивается размещением стойки между тремя самоцентрирующимися опорами скольжения, установленными в плоскости оси центра масс платформы. Качание платформы обеспечено только в сторону движения ленты. Технический результат заключается в повышении точности, стабильности и надежности работы конвейерных весов, защищенных от ударных воздействий транспортируемого груза. 3 ил.
Конвейерные весы, защищенные от ударных воздействий транспортируемого груза, содержащие поворотную в поперечной плоскости конвейера грузоприемную платформу, два корпуса, две обоймы, два вала, при этом в каждом корпусе, расположенном по бокам ленты конвейера, установлен датчик силы и размещена стойка с самоцентрирующимся подшипниковым узлом, причем валы, расположенные на одной прямой в поперечной плоскости конвейера и параллельно ему, закреплены наружными концами в подшипниковых узлах соответствующих стоек, а внутренними - в обоймах, скрепленных с боковыми откосами грузоприемной платформы, центр масс которой совмещен с осью поворота валов, отличающиеся тем, что каждая стойка, ось нагрузки которой совмещена с осью нагрузки соответствующего датчика силы, свободно и подвижно опирается на его грузоприемный элемент через опору скольжения и имеет подвижность по оси нагрузки датчика силы между тремя самоцентрирующимися опорами скольжения, первая располагается на торцевой стороне стойки и ее центр совмещен с осью поворота валов, вторая и третья опоры располагаются по боковым сторонам стойки, а их центры размещены на уровне оси поворота валов в продольной плоскости конвейера, совпадающей с осью нагрузки стоек, и в этих опорах имеется рабочий зазор, причем со стороны набега ленты на грузоприемной платформе ниже ее оси центра масс установлен контргруз, опрокидывающий грузоприемную платформу в сторону набега ленты, а исходное положение грузоприемной платформы, совпадающее с осью нагрузки стоек, восстанавливается гибкой стрункой, закрепленной одним концом со стороны схода груза на боковом откосе грузоприемной платформы выше ее оси центра масс, а другим концом на ставе конвейера и параллельно ему, при этом масса контргруза и создаваемый им момент опрокидывания грузоприемной платформы в сторону набега ленты, соответствует обратному моменту, создаваемому силой трения между роликами грузоприемной платформы и лентой при ее движении.
| Конвейерные весы | 1982 |
|
SU1242717A1 |
| Конвейерные весы | 1989 |
|
SU1682817A1 |
| Контейнер для жидкости | 1972 |
|
SU452958A3 |

