1
Изобретение относится к автоматике и может быть использовано при управлении летательными аппаратами всевозможных классов, кораблями и судами на воздушной подушке.
Известна система регулирования, содержащая последовательно соединенные измеритель рассогласования, регулятор и исполнительный механизм выход которого соединен со входом объекта регулирования, выход котор ого соединен с одним из входов измертеля рассогласования, и измерители величины возмущения, действующего на объект, выход которого через функциональный преобразователь соединен со вторым входом регулятора, причем измеритель формирует информацию о величине возмущения как пряошм путем (т.е. непосредственным измерением сигнала возмущения), так и косвенным,(т.е. по измерениям сигнала управления и регулируемой координаты) TI ,
Известны системы регулирования, содержащие последовательно соединенные измеритель рассогласования, регулятор и исполнительный механизм, вход которого соединен со входом объекта регулирования и через последовательно соединенные датчик сигнала управления и модель объекта с первым входом блока сравнения, выход объекта регулирования соединен с одним из входов измерителя рассогласования и через датчик регулируемой координаты со вторым входом блока сравнения, шаход которого через фильтр и формирователь корректи0рукицего сигнала соединен либо со вторым входом регулятора, либо со вторым входом исполнительного механизма (место включения компенсирующего сигнала определяется конструк5тивными особенностями выполнения контура формирования компенсирующего сигнала L2, Гз и Г4.
Наиболее близкой по технической сущности к изобретению является система регулирования, содержащая последовательно соединенные регулятор и исполнительный механизм, выход которого соединен со входом объекта регут лирования,и через последовательные
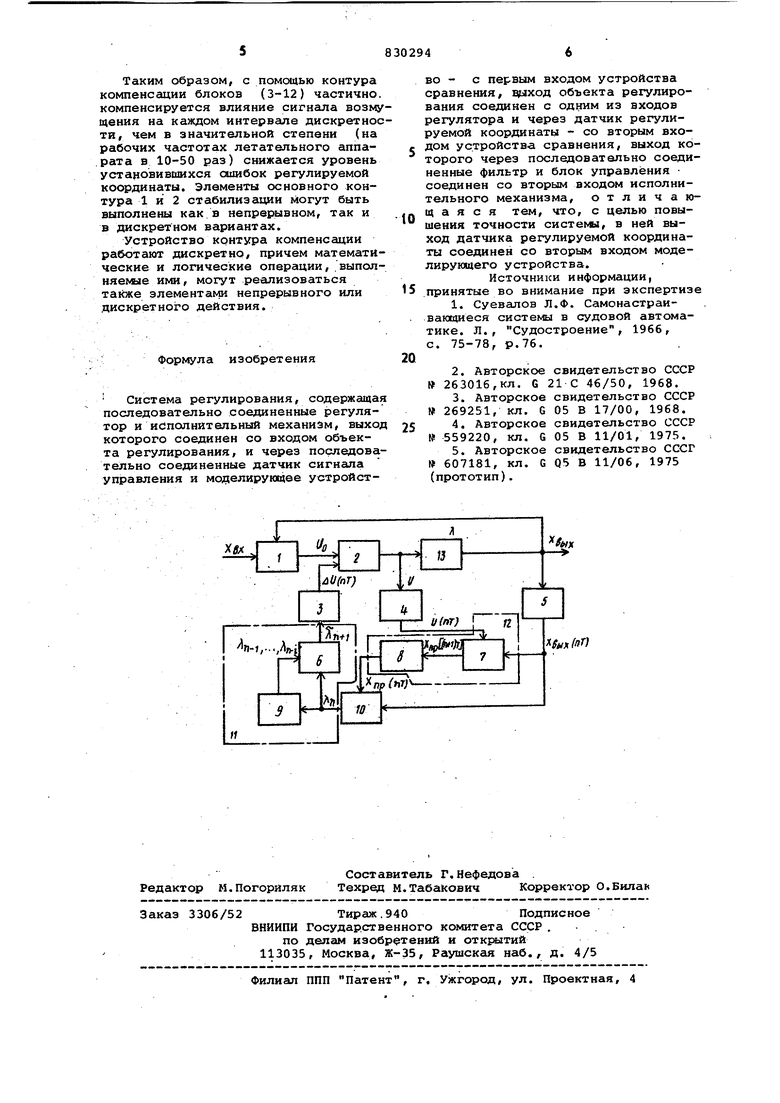
5 соединенные датчик сигнала управления и моделирующее устройство - с первым входом устройства сравнения, выход объекта регулирования соединен с одним из входов регулятора и через датчик регулируемой координаты СО вторым входом устройства сравнен выход которого через последовательно соединенные фильтр и блок управления соединен со вторым входом исполнительного механизма s , Однако данная система обладает низкой точностью. Цель изобретения - повышение точ ности системы регулирования. Поставленная цель достигается те что в систе;;е выход датчика регулируемой координаты соединен со вторы входом моделирующего устройства. Динамика системы описывается ура нением X(t),U)F(i),- (1) где X (t) - вектор фазовых координат объектива; и - вектор управлякхких воздействий Ф - заданная функция, харак теризушцёи динеишческие свойства объекта; F(t)- вектор возмущающих сил. При переходе во временную област решение уравнения (1) может быть записано в виде уравнения параметров состояния X()(nT).(nтhCП F(nT), (2) в правой части которого первая нента характеризует собственное дви жение объекта, вторая - эффект действия управлейия, а третья --эффект действия возмущения на промежутке времени rr)rjj(n-и)т. Компонента (пТ) является случайной величиной, полная компенс ция которой невозможна. Однако возможно построение система, в которой за счет изменения эффекта действия управления осуществляется компенсация некоторой (ххенки возмущения lf(n+l)Tj, полученной в результате ее прогнозирования по оценкам, вычи ленным на предьшущих К шагах измере ния ЛГ(п --i) (i-0,1 2,...К), т.е. обеспечивается выполнение условия (пт)-1()т , (3) где гЦпм)(т)Р(пт)2;(ЛГп-1)тЗ,...-, Д(П-141)Т,...,А.(ПТ), AU(hT) - корректирующее управляющее воздействие. С учетом (3) уравнение (2) записывается в виде X(n+.)((t(H,(f)ЛU(nT))f ARn+ilTj , где UJnT) управляющее воздействие, выработанное регулятором для промеж ка времени ГпТ ,(пч1 )Т, -1(п + 1) сигнал возмущения в момент (п+1)Т. На чертеже представлена блок-схема устройства. Система содержит регулятор 1, исполнительный механизм 2, блок 3 управления, датчик 4 сигнала управления. Датчик 5 регулируемой координаты, первый и второй блоки 6 и 7 прогнозирования, устройство 8 сдвига, блок 9 задержки, устройство 10 сравнения, фильтр 11, моделирующее устройство 12, объект 13 регулирования, Xg- входной сигнал, Ug- выходной сигнал регулятора, U - сигнал управления, Xgyj регулируемая координата, Л - сигнал возмущения, ди - компенсирующий сигнал. Устройство работает следующим образом. Основной контур управления, состоящий из регулятора 1, исполнительного механизма 2 и объекта 13 регулирования, предназначен для ликвидации основных рассогласований между заданным Xgy и текущим Х,значениями регулируемой координаты. К основному сигналу управления Ug на входе исполнительного механизма добавляется компенсирующий сигнал ди(пТ), являющийся постоянным на интервале пТ ti(n-i-1)T, где Т - период дискретности, и формируемой контуром компенсёщий, в состав которого входят блоки 3-12. В конце п-го периода через датчики 4 и 5 информация о величине управляющего сигнала U и регулируемой координате в виде дискретных значений U(nT) и Х(пТ) принимается и фиксируется в моделирующем устройстве 13, где по алгоритму iX pRrHi)(nTHB(T)u(nT), определяется оценка регулируемой координаты для конца ()-го периода. В устройстве 7 сдвига эта оценка задерживается по времени на один период. В момент времени t°nT с выхода устройства 7 сдвига вычисленная при t(n-1)T оценка ) сравнивается с текущим значением параметра Х(пТ) в устройстве 10 сравнения, в результате чего определяется (щенка сигнгша возмущения Я(пТ) за п-й период, т.е. оценка слагаемого CprlF(nT) из (2). По величине Д-(пТ) и К прех(ыдущих оценок АКпОТ/, i-1,2,.. .К, хранящихся в устройстве 7 задержки, прогнозируется оценка сигнала возмущения АГ(| 1)TJ за ( 1)-и период дискретности по определенному алгоритму экстраполяции. В блоке 3 управления по выходному сигналу фильтра 11 определяется и фиксируется на проме-. |Жутке (пТ), (п-«-1}Т корректирующий сигнвл ди(пТ).
Таким образом, с помощью контура компенсации блоков (3-12) частично, компенсируется влияние сигнала возмущения на каждом интервале дискретности, чем в значительной степени (на рабочих частотах летательного аппарата в 10-50 раз) снижается уровень установившихся ошибок регулируемой координаты. Элементы основного контура 1 и 2 стабилизации могут быть выполнены как в непрерывном, так и в дискретном вариантах.
Устройство контура компенсации работают дискретно, причем математические и логические операции, выполняемое ими, могут реализоваться также элементами непрерывного или дискретного действия.
Формула изобретения
Система регулирования, содержащая последовательно соединенные регулятор и исполнительный механизм, выход которого соединен со входом объекта регулирования, и через последовательно соединенные датчик сигнала управления и моделирующее устройство - с первым входом устройства сравнения, цыход объекта регулирования соединен с одним из входов регулятора и через датчик регулируемой координаты - со вторым вхос дом устройства сравнения, выход которого через последовательно соединенные фильтр и блок управления соединен со вторым входом исполнительного механизма, отличающаяся тем, что, с целью повы0шения точности систекы, в ней выход датчика регулируемой координаты соединен со вторым входом моделирующего устройства.
Источники информации,
5 принятые во внимание при экспертизе
1. Суевалов Л.Ф. Самонастраивающиеся системы в судовой автоматике. Л., Судостроение, 1966, с. 75-78, р.76.
0
2.Авторское свидетельство СССР 263016,кл. G 21 С 46/50, 1968.
3.Авторское свидетельство СССР 269251, кл. G 05 В 17/00, 1968.
4.Авторское свидетельство СССР
5 № 559220, кл. G 05 В 11/01, 1975.
5.Авторское свидетельство СССГ № 607181, кл. G Q5 В 11/06, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Устройство для задания и автоматической стабилизации давления | 1988 |
|
SU1621005A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1513416A1 |
| Многоканальная система управления процессом приготовления смесей | 1974 |
|
SU732811A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАСКАДНЫМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 1991 |
|
RU2012032C1 |
| Система автоматического управления температурным режимом наклонной диффузионной установки | 1984 |
|
SU1252340A1 |
