(54) ТРЕНАЖЕР ВОДИТЕЛЯ ТРАНСПОРТНЬГХ СРЕДСТВ
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Учебное устройство для дозирования усилия на педаль сцепления транспортного средства при начале движения | 2022 |
|
RU2805237C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| Устройство имитации условий движения транспортного средства для тренажера | 1984 |
|
SU1365109A1 |
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| КОМПЬЮТЕРНЫЙ ТРЕНАЖЕР НАЧАЛЬНОЙ ПОДГОТОВКИ МЕХАНИКА-ВОДИТЕЛЯ | 2001 |
|
RU2190256C1 |
| Тренажер для водителей транспортных средств | 1983 |
|
SU1238135A1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| ТРЕНАЖЕР МЕХАНИКА-ВОДИТЕЛЯ | 2023 |
|
RU2828735C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1999 |
|
RU2155991C1 |
I
Изобретение относится к автоматике и вычислительной технике, в частности к устройствам дпя обучения управления транспортными средствами.
Известен автомобильный тренажер, оборудованный учетным местом, содёр- жаший рычаги переключения передач, педали акселератора, тормоза, сцепления, блок имиташш условий вождения, блок имитации шумовых эффектов Tl 1.
Недостаток этого устройства заклю чается в том, что этот тренажер не позволяет производить обработку навыка синхронного управления педалями акселератора и сцепления в необходимом временном темпе.
Наиболее близким техническим решением к изобретению является автомобильный тренажер, содержащий педали акселератора и сцепления, механически связанные с электроконтактными датчиками, органы управления , рычаги коробки передач, блок моделирования визуальной обстановки 2.
Недостаток данного устройства заключается в том, что при несинхронном уп - равлении педалями электрическая цепь разрьшается и выдается сигнал ошибки.
Электрической схеме этого тренажера свойственны все недостатки, присущие схемам с подвижными элекфическими контактами : искрение, окисление контактов и потеря переходной проводимости, сложные срабатывания лэ-за вибрации контакте при перемещении. Кроме тото, отсутствие имитации шума двигателя не позволяет проводить самоконтроль при работе на транажере, соответствующий реальным условиям , так как в
5 автомобиле шум двигателя $шляе1ся ориентиром для водителя при синхронном управлении педалями. Отсутствие имитации шума двигателя и моделирования визуальной обстановки при движении не
0 позволяют отрабатывать прочие навыки, необходимые для управления автомобилем.
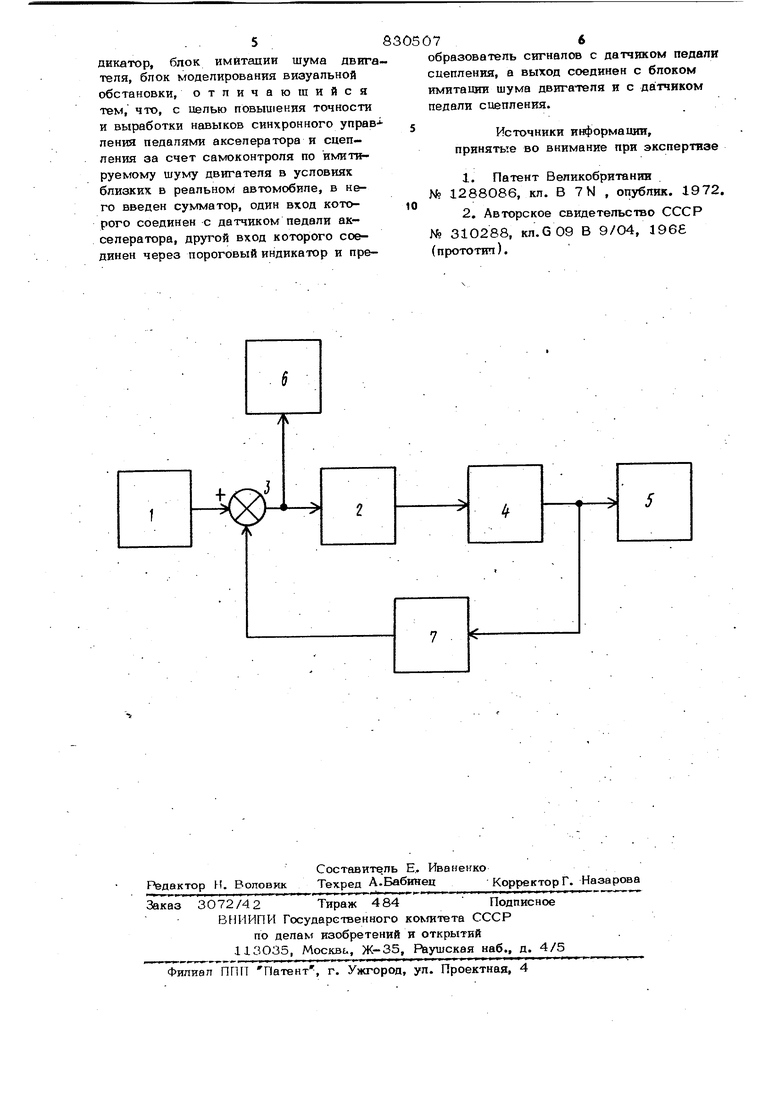
Цель изобретения - повышение точности и выработки навыков синхронного управления педалями акселератора и cuen пеиия за счет самоконтроля по имитируBMONfy шуму двигателя в условиях бпиэккх в реальном автомобиле. Указанная цель достигается тем, что в устройств.о, содержащее датчики педалей-акселератора и сцепления, махани-чески связанные с органами управления, коробку перадач, соединенную с преобрааователем .сигнапаа, пороговый индикатор, блок имитации Шума двигателя, блок моделирования визуальной обстановки, в него введен сумматор, один вход которого соединен с датчиком педали аксеператора, другой вход которого соединен через пороговый индикатор и преобразователь сигналов с датчиком педали сцепления, а в-ыход соединен с блоком имитации шума двигателя и с датчиком педали сцепления. На чертеже представлена блок-схема .устройства. Устройство содержит датчики 1 и 2, механически связанные с педалями соответственно,. акселератора и сцепления (в-качестве датчиков могут быть кспользованы, например, .переменные резисторы), сумматор 3, преобразователь 4 сигналов, коэффициент передачи которого изменяется-переключением рычага коробки передач (не показаны), блок 5 мо делирования визуальной обстановки-, блок 6 имитации шума двигателя , пороговый индикатор 7. Устройство работает следующим обра зом. При включении нейтрали передач сигнал на выходе преобразователя 4 сигналов отсутствует. С выхода сумматора 3 на блок 6 имитации шума двигателя поступает сигнал, соответствующий шуму двигателя при р.аботе .на холостом ходу. При нажатии педали акселератора сигналы на выходе датчика 1 и сумматора 3 . увепичиваются. Блок 6 имитации шума двигателя имитирует шум нарастающ оборотов двигателя. При включенной первой передаче и : . полностью выжатой педали сцепления вы ходные сигналы датчика 2 и преобразователя 4 сигналов также отсутствуют. По мере отпускания педали сцепления появляются и увеличиваются сигна- пы на выходе датчика 2 и преобразователя 4 сигналов, выходной сигнал с преобразователя 4 сигналов поступает на вход бпо.ка 5 моделирования визуаль ной обстановки, вызывая изменение BI уальной обстановки, т.е. имитацию наала движения. Сигнал с выхода датчика 2 поступает на вход сумматора 3. Выходной сигнал сумматора 3 уменьшается и блок 6 имитации шума двигателя имитирует спадание оборотов двигателя. Для ком пенсации спадания оборотов необходрмо дополнительное нажатие педали акселератора, что ведет к увеличению сигнала на выходе датчика 1 и восстановлению уровня сигнала на выходе сумматора 3. При опережающем нажатии педали акселератора увеличивается выходной сигнал сумматора 3 и чрезмерно возрастает имитируемый шум двигателя. При опережающем отпускании педали сцепления выходной сигнал сумматора 3 уменьшается, уменьшается и имитируемый . шум двигателя. Уменьшение выходного сигнала сумматора 3, кроме того, влечет за собой уменьшение входных и соответствен-но выходных сигналов датчика 2 и преобразователя 4сигналов. Если в конце хода педали сцепления сигнална выходе преобразователя 4 сигналов не успевает достигнуть величины порога индикатора 7, последний снимает питание с датчика 1, имитируя заглохший двигатель. При синхронном управлении педалями акселератора и сцепления сигнал на выходе сумматора 3 не изменяется. Аналогично производится переключение с первой передачи на вторую и т.д. Скорость .изменения визуальной обстановки при этом увеличивается из-за возрастания коэффициента передачи преобразователя 4 сигналов, управляемого рычагом переключения коробки передач. Таким образом, производится отработка навыка синхронного управления пед лями дросселя и сцепления при трогании и в движении и самоконтроль по уровню имитируемого шума двигателя, что .соответствует реальным условиям в автомобиле. . Формула изобретения Тренажер водителя транспортных средств, содержащий датчики педалей акселератора и сцепления, механически Обязанные с оргйнами управления, коробку передач, соединенную с преобразователем сигналов, пороговый индикатор, блок имитации шума двига теля, бпок моделирования визуальной обстановки, отличающийся тем, что, с цепью повыиюния точности и выработки навыков синхронного ynpaeJ Ленин педалями акселератора и сцепления за счет самоконтроля по имитируемому шуму двигателя в условиях близких в реальном автомобиле, в него введен сумматор, один вход которого соединен с датчиком педали акселератора, другой вход которого соединен через пороговый индикатор и пре8305076
образователь сигналов с датчиком педали сцепления, а выход соединен с блоком имитации шума двигателя и с да:тчиком педали сцепления.
Источники информации,
принятые во внимание при экспертизе
№ 1288086, кл. В 7N , опублик. 1972.
