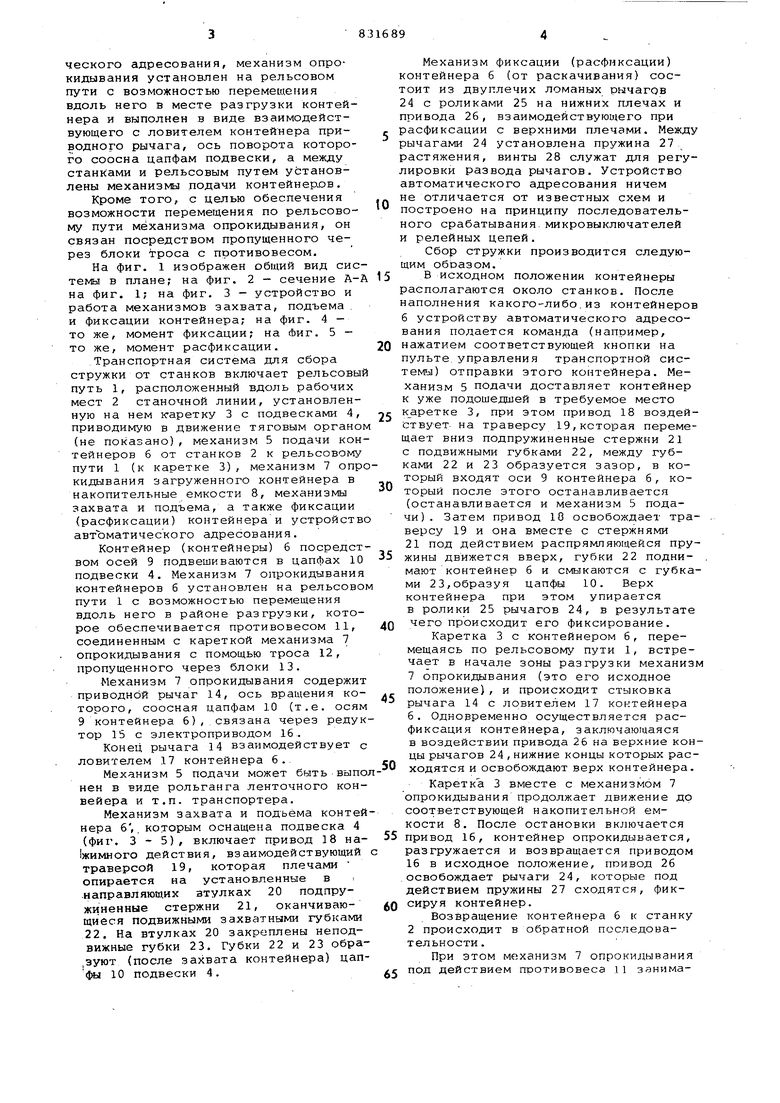
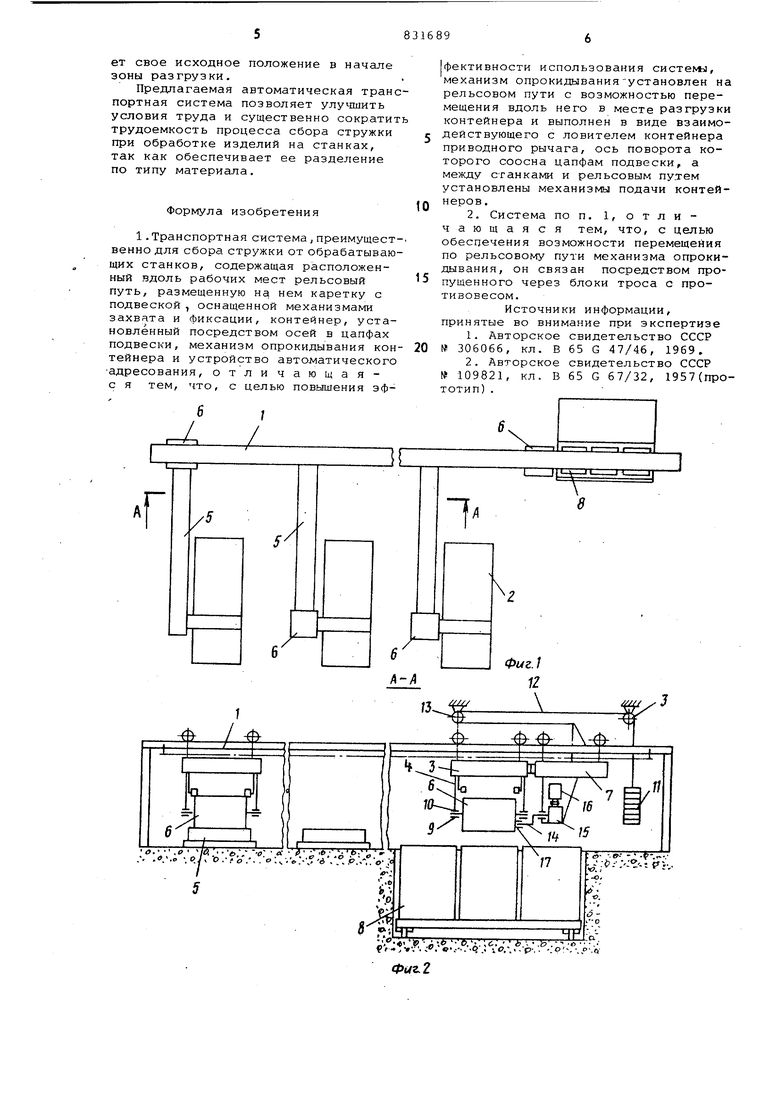
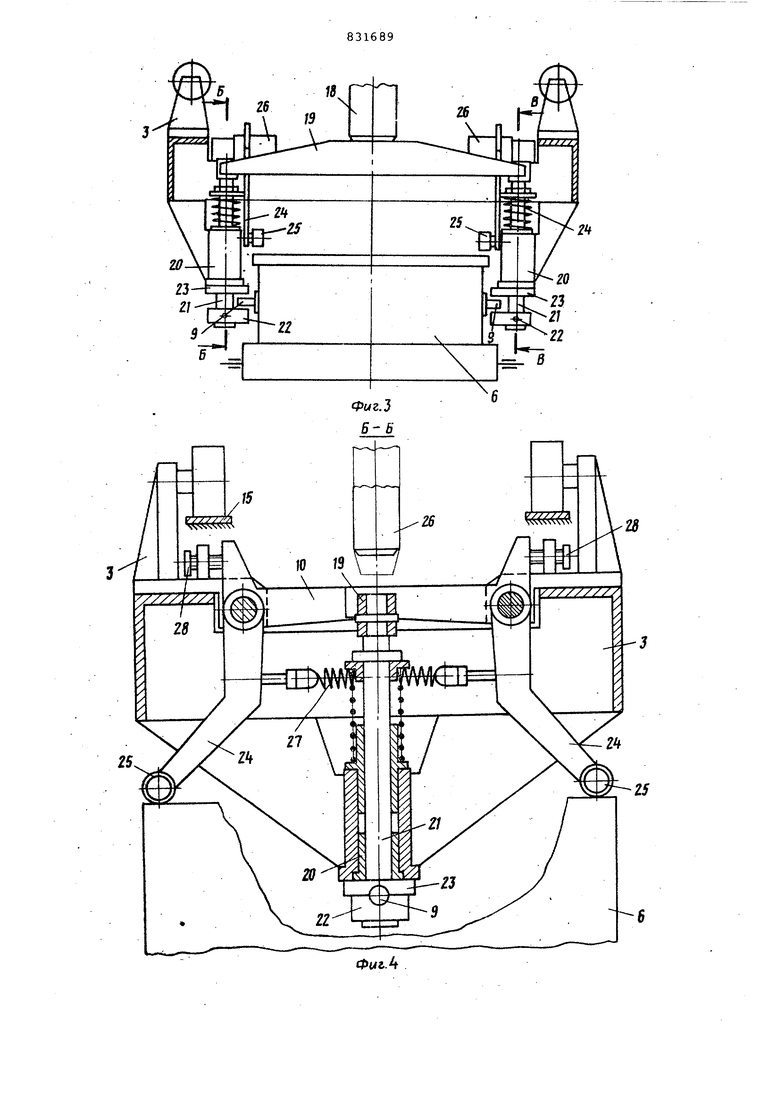
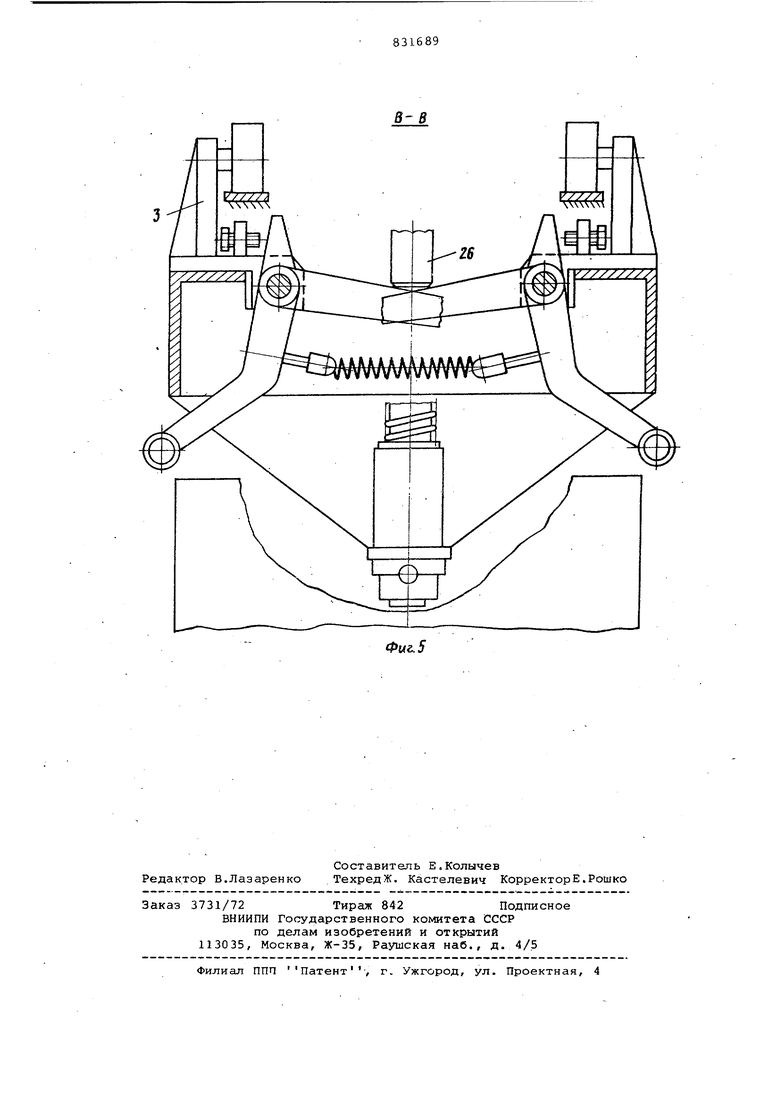
ческого адресования, механизм опрокидывания установлен на рельсовом пути с возможностью перемеюения вдоль него в месте разгрузки контейнера и выполнен в виде взаимодействующего с ловителем контейнера приводного рычага, ось поворота которого соосна цапфам подвески, а между станками и рельсовым путем установлены механизмы подачи контейнер эв, Кроме того, с целью обеспечения возможности перемещения по рельсовому пути механизма опрокидывания, он связан посредством пропущенного через блоки троса с противовесом. На фиг. 1 изображен общий вид сис темы в плане; на фиг. 2 - сечение Ана фиг. 1; на фиг, 3 - устройство и работа механизмов захвата, подъема . и фиксации контейнера; на фиг. 4 то же, момент фиксации; на Фиг, 5 - то же, момент расфиксации, Транспортная система для сбора стружки от станков включает рельсовы путь 1, расположенный вдоль рабочих мест 2 станочной линии, установленную на нем к-аретку 3 с подвесками 4, приводимую в движение тяговым органо (не показано), механизм 5 подачи кон тейнеров б от станков 2 к рельсовому пути 1 (к каретке 3), механизм 7 опр кидывания загруженного контейнера в накопительные емкости 8, механизмы захвата и подъема, а также фиксации (расфиксации) контейнера и устройств автоматического адресования. Контейнер (контейнеры) 6 посредст вом осей 9 подвешиваются в цапфах 10 подвески 4, Механизм 7 опрокидывани контейнеров 6 установлен на рельсово пути 1 с возможностью перемещения вдоль него в районе разгрузки, кото рое обеспечивается противовесом 11, соединенным с кареткой механизма 7 опрокидывания с помощью троса 12, пропущенного через блоки 13, Механизм 7 опрокидывания содержи приводной рычаг 14, ось вращения ко торого, соосная цапфам 10 (т,е, ося 9 контейнера 6), связана через реду тор 15 с электроприводом 16,. Конец рычага 14 взаимодействует ловителем 17 контейнера 6. Механизм 5 подачи может быть вып нен в виде рольганга ленточного кон вейера и т.п. транспортера. Механизм захвата и подъёма конте нера 6,. которым оснащена подвеска 4 (фиг. 3-5), включает привод 18 на 1жимного действия, взаимодействующий траверсой 19, которая плечами опирается на установленные в .направляющих втулках 20 подпружиненные стержни 21, оканчивающиеся подвижными захватными губками 22. На втулках 20 закреплены неподвижные губки 23. Губки 22 и 23 обра ,зуют (после захвата контейнера) цап фы 10 подвески 4, Механизм фиксации (расфиксации) контейнера 6 (от раскачивания) состоит из двуплечих ломаных рычагов 24 с роликами 25 на нижних плечах и привода 26, взаимодействующего при расфиксации с верхними плечами. Между рычагами 24 установлена пружина 27 растяжения, винты 28 служат для регулировки развода рычагов. Устройство автоматического адресования ничем не отличается от известных схем и построено на принципу последовательного срабатывания микровыключателей и релейных цепей. Сбор стружки производится следующим образом. В исходном положении контейнеры располагаются около станков. После Наполнения какого-либо.из контейнеров 6 устройству автоматического адресования подается команда (например, нажатием соответствующей кнопки на пульте управления транспортной системы) отправки этого контейнера. Механизм 5 подачи доставляет контейнер к уже подощедшей в требуемое место к аретке 3, при этом привод 18 воздействует- на траверсу 19,которая перемещает вниз подпружиненные стержни 21 с подвижными губками 22, между губками 22 и 23 образуется зазор, в который входят оси 9 контейнера 6, который после этого останавливается (останавливается и механизм 5 подачи). Затем привод 10 освобождает траверсу 19 и она вместе с стержнями 21 под действием распрямляющейся пружины движется вверх, губки 22 подни- . мают контейнер 6 и смыкаются с губками 23,образуя цапфы 10, Верх контейнера при этом упирается в ролики 25 рычагов 24, в результате чего происходит его фиксирование. Каретка 3 с контейнером 6, перемещаясь по рельсовому пути 1, встречает в начале зоны разгрузки механизм 7 опрокидывания (это его исходное положение), и происходит стыковка рычага 14 с ловителем 17 контейнера 6, Одновременно осуществляется расфиксация контейнера, заключающаяся в воздействии привода 26 на верхние концы рычагов 24 , нижние концы которых расходятся и освобождают верх контейнера. Каретка 3 вместе с механизмом 7 опрокидывания продолжает движение до соответствующей накопительной емкости 8, После остановки включается привод 16, контейнер опрокидывается, разгружается и возвращается приводом 16 в исходное положение, ПРИВОД 26 освобождает рычаги 24, которые под действием пружины 27 сходятся, фиксируя контейнер. Возвращение контейнера 6 к станку 2 происходит в обратной последовательности. При этом механизм 7 опрокидывания под действием противовеса l1 занимает свое исходное положение в начале зоны разгрузки. Предлагаемая автоматическая тран портная система позволяет улучшить условия труда и существенно сократит трудоемкость процесса сбора стружки при обработке изделий на станках, так как обеспечивает ее разделение по типу материала. Формула изобретения 1. Транспортная система, преимущест венно для сбора, стружки от обрабатываю щих станков, содержащая расположенный вдоль рабочих мест рельсовый путь, размещенную на нем каретку с подвеской , оснащенной механизмами захвата и фиксации, конте15нер, установленный посредством осей в цапфах подвески, механизм опрокидывания кон тейнера и устройство автоматического адресования, отличающаяс я тем, что, с целью повышения эффективности использования система, механизм опрокидыванияустановлен на рельсовом пути с возможностью перемещения вдоль него в месте разгрузки контейнера и выполнен в виде взаимодействующего с ловителем контейнера приводного рычага, ось поворота которого соосна цапфам подвески, а между станками и рельсовым путем установлены механизмы подачи контейнеров . 2. Система по п. 1, отличающаяся тем, что, с целью обеспечения возможности перемещения по рельсовому пути механизма опрокидывания, он связан посредством пропущенного через блоки троса с противовесом. Источники информации, принятые во внимание при зкспертизе 1.Авторское свидетельство СССР № 306066, кл. В 65 G 47/46, 1969. 2.Авторское свидетельство СССР № 109821, кл. В 65 G 67/32, 1957(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Мусоровоз | 1985 |
|
SU1265099A1 |
| Крановый захват-кантователь | 1976 |
|
SU704883A1 |
| Захватное устройство для контейнеров с цапфами | 1978 |
|
SU740684A1 |
| Захват-кантователь для контейнеров с цапфами | 1989 |
|
SU1664720A1 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Устройство для подъема и опрокидывания контейнеров | 1980 |
|
SU918189A1 |
| Захват-кантователь для контейнеров с цапфами на боковых стенках | 1986 |
|
SU1379232A1 |
| Устройство для погрузки и разгрузки контейнеров, снабженных цапфами | 1975 |
|
SU536112A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И РАЗГРУЗКИ КОНТЕЙНЕРОВ, СНАБЖЕННЫХ ЦАНФАМИ | 1973 |
|
SU387917A1 |
. .; , -О. .( .., « ..;«.-. o. -.р -.-.Q
Фаг,г
ФмаЛ
Фиг. 5
