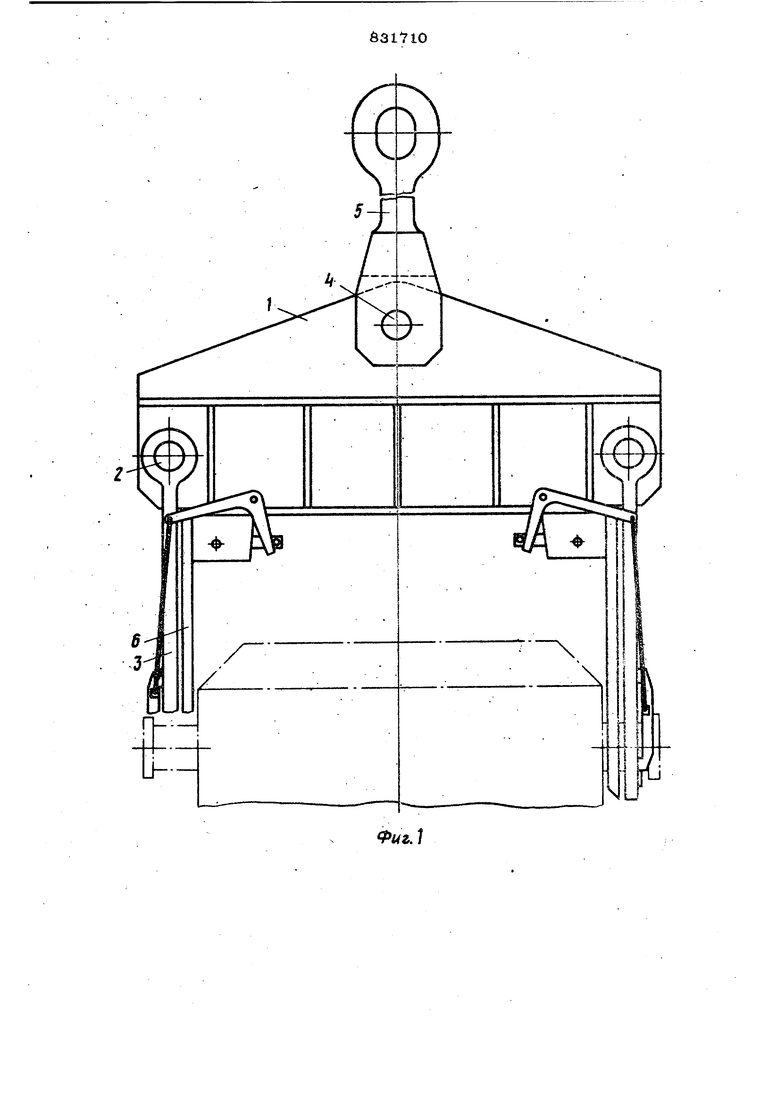
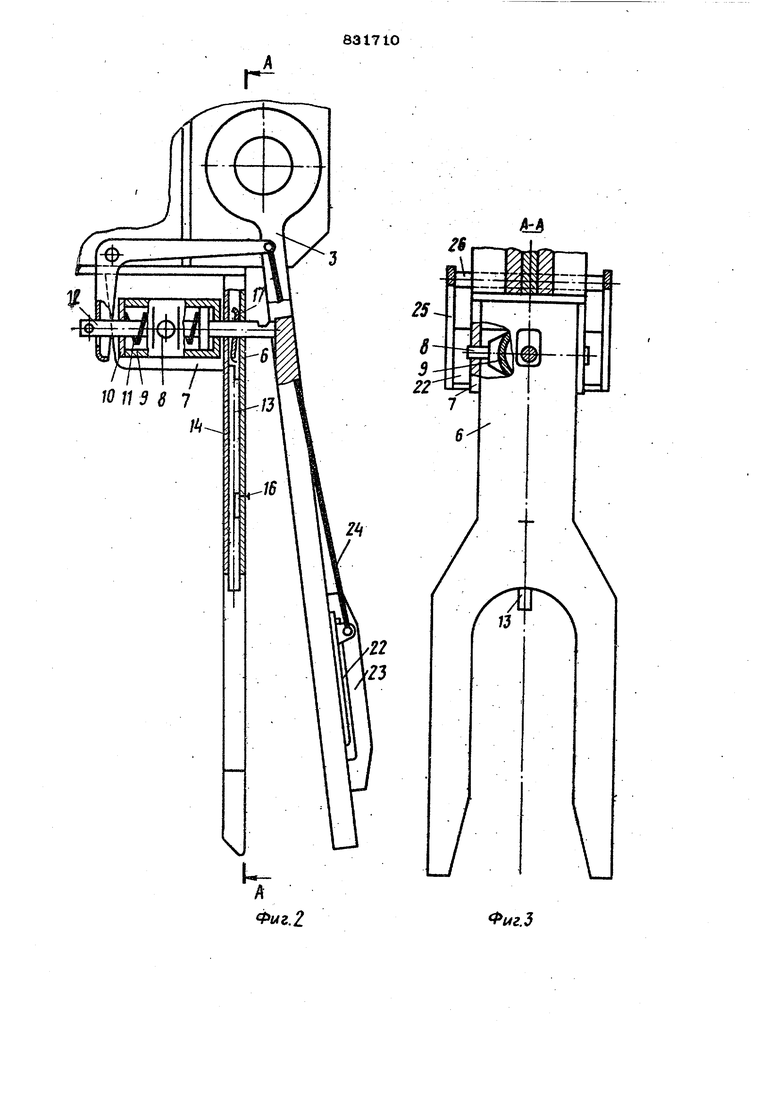
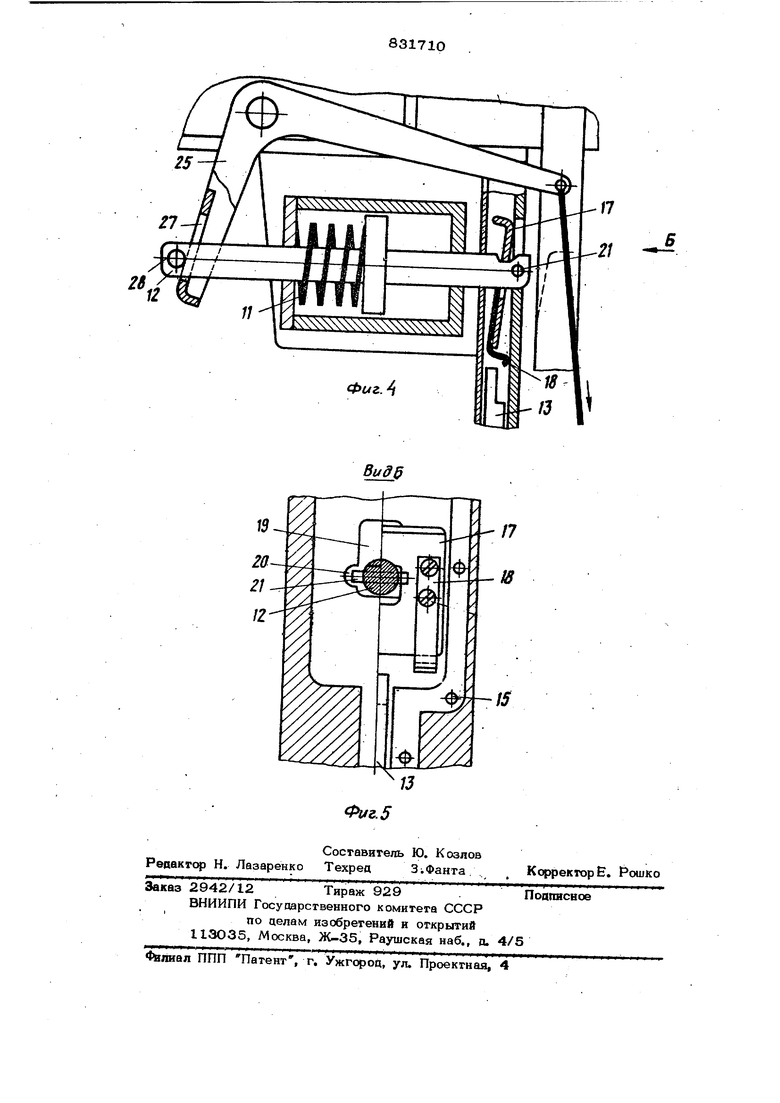
замочная скважина. К траверсе I посредством оси 4 крепится штанга 5 с проушиной для навешивания на крюк крана, а снизу жестко закреплены направляющие вилки 6. К вилке 6 и траверсе I прикреплен приводной фиксатор, состоящий из щеки 7 с отверстиями для цапфЗ шарнирно закрепленного на траверсе цили ндра 9, закрытого крышкой Ю. Внутри цилинпра помещена пружина 11, насаженная на шток 12. В вилке выполнен просч:; дольный паз, в котором размещен толкатель 13 со ступенчатым верхним концом Паз закрыт крышкой 14, закрепленной винтами 15. Толкатель фиксируется боятом 16. В верхней части вилки размещена рамка 17 с прямоугольным отверстием, по обе стороны котфого установлены плоские пружины 18. В вилке 6 выполнено прямоугольное отверстие 19 с двумя карманами 2О, в которые входят концы закрепленного на штоке пальца 21. На внешней стороне захватного органа 3 установлен 4игурный ползун 22 и ограничительные скобы 23. Концы ползуна посредством гибких тяг 24 соединены с Г-образными рычагами 25, установленными на оси 26. Вертикальные плечи рычагов соединены поперечиной 27, На конце штока 12 закреплен также палец 28, Устройство работает следующим образом. При опускании устройства на контейнер вилки 6 обеспечивают точную устано ку захватных органов 3 относительно кон тейнера. Толкатеш 13 упираются в цапфы, при этом рамки 17 нажимают на штоки 12 и разворачивают их вместе с цилиндрами 9 вокруг цапф 8. При подъеме траверсы цапфы входят в узкую часть отверстий захватных oprefнов и смещают при этом в нижнее полож ние ползунь 22, которые поворачивают тягами 24 рычаги 25. Рычаги перемещают штоки 12, сжимая пружины II, а рамки 17 опускаются в прорези на концах Ш ГОКОВ. После транспортирования и опускания контейнера ползуны 22, а вместе с ними рычаги 25 и штоки 12 под действием пружины 1.1 начинают возвращаться в не одаое положение. Затем штоки 12 упира- этся в рамки 17 и останавливаются. Пружины 18 отгибаются, рамки 17 ориентируются относительно толкателей 13г Т1ри совмещении цапф контейнера с широкой частью отверсшй захватных органов 3 толкатели 13 упираются в цапфы, смещают замки вверх и освобождают што- кн 12. Освободившиеся штоки под возое ствием пружины 11 отбрасывают в стороны захватные органы 3, и контейнер освобождается. После подъема устройства толкатели 13 опускаются вниз и освобождают рамки 17, которые под действием пружины 18 занимают исходное положение, после чего устройство готово к выполнению очередного цикла операций. Предлагаемое устройство позволяет повысить прсмсзводительность труда при перегрузке грузов в контейнерах с цапфами за счет автоматизации .процесса их зазшата и освобождения. Формула изобретения I Захватное устройство ояя контейнеров С1 цапфами, содержащее траверсу, шарнирно закрепленные на ней жесткие тяги, кая дая из которых имеет отверстие типа замочная скважина , и приводной 4мксаTopv отличающееся тем, что, с целью обеспечения автоматического захвата груза, око снабжено жестко закрепленными на траверсе направляющими вилками, а приводной фиксатор содержит шарнирно закрепленный на траверсе цилиндр с подпружиненным штоком, на который насаж,ена ограничительная рамка, размещенный в вилке толкатепь,взаЕмодействующий с ограничительной рамкой, и шарнирно за1фепл 1ный на траверсе двуплечий рычаг, к одному концу которого присоединен посредством гибких тяг ползун, установленный на жесткой тяге. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР М 614001, кл. В 66 С 1/66, 1978. 2.Авторское свидетельство СССР М 472887, кл. В 66 С 1/66, 1974 (прототип).
Фиг.2
иг.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для контейнеров с цапфами | 1982 |
|
SU1054275A1 |
| Захватное устройство для контейнеров с цапфами | 1980 |
|
SU901236A1 |
| Захватное устройство для контейнера с цапфами | 1981 |
|
SU1020356A1 |
| Захватное устройство для контейнеров с цапфами | 1983 |
|
SU1221853A1 |
| Захватное устройство для контейнеров с цапфами | 1975 |
|
SU614001A1 |
| Захват-кантователь для контейнеров с цапфами | 1984 |
|
SU1221178A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Захват для укладки плоских изделий в штабель | 1983 |
|
SU1159872A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Саморазгружающийся контейнер | 1979 |
|
SU789336A1 |