(54) РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА ТИПА ПРЯМАЯ ЛОПАТА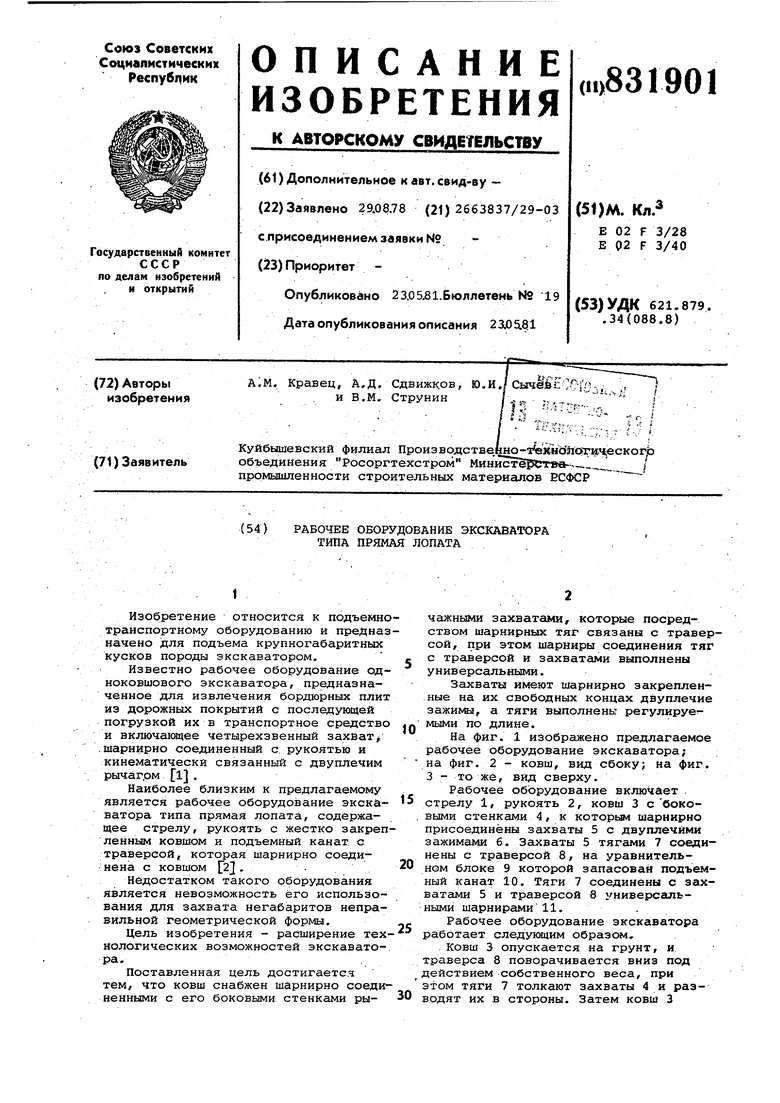
| название | год | авторы | номер документа |
|---|---|---|---|
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ ТИПА ПРЯМОЙ ЛОПАТЫ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU239130A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2010 |
|
RU2450106C1 |
| Рабочее оборудование одноковшового экскаватора | 1988 |
|
SU1668566A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР СИСТЕМЫ ИНЖЕНЕРА КУРКОВА | 1991 |
|
RU2005855C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОБРАТНОЙ ЛОПАТЫ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2004 |
|
RU2266371C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВЫХ ГИДРАВЛИЧЕСКИХ ЭКСКАВАТОРОВ | 2005 |
|
RU2310044C2 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| Рабочее оборудование одноковшового экскаватора | 1972 |
|
SU446590A1 |
| Рабочее оборудование экскаватора-планировщика | 2023 |
|
RU2803183C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ПРЯМОЙ ИЛИ ОБРАТНОЙ ЛОПАТ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2003 |
|
RU2236510C1 |
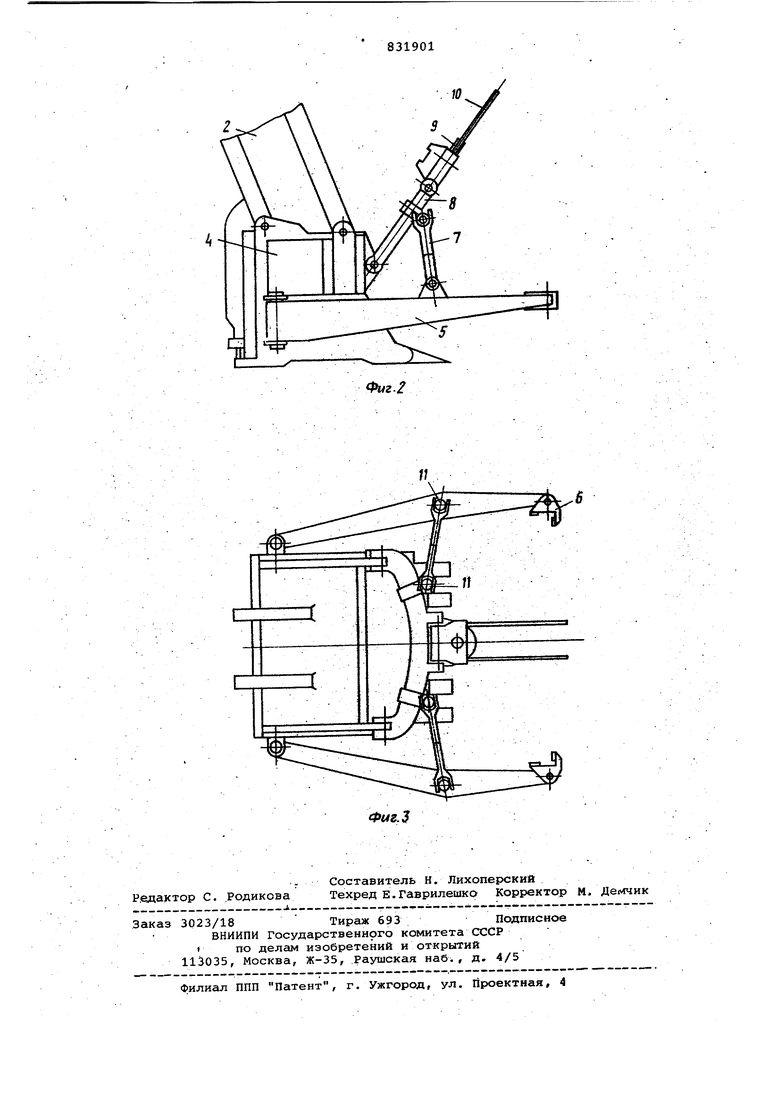
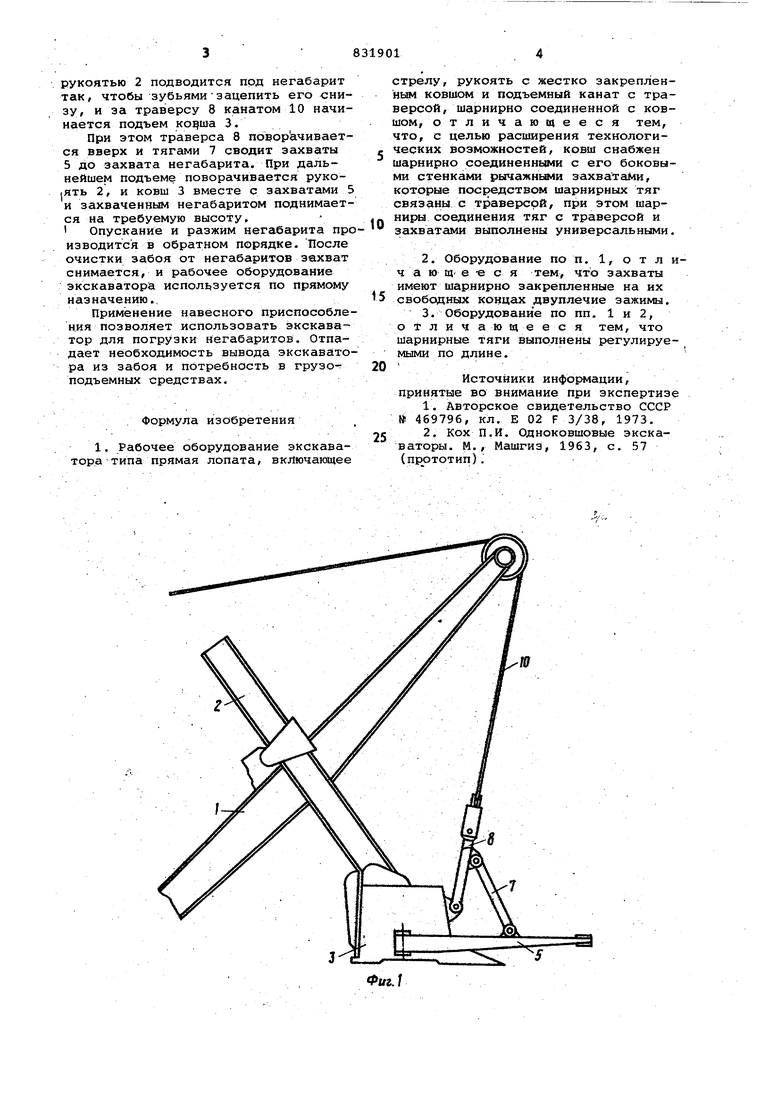
Изобретение относится к подъемно транспортному оборудованию и предназ начено для подъема крупногабаритных кусков породы экскаватором. Известно рабочее оборудование одноковшового экскаватора, предназначенное для извлечения бордюрных плит из дорожных покрытий с последующей погрузкой их в транспортное средство и включаняцее четнрехзвенный захват , .шарнирно соединенный с. рукоятью и кинематически связанный с двуплечим рычаг.ом fl . Наиболее близким к предлагаемому является рабочее оборудование экскаватора типа прямая лопата, содержащее стрелу, рукоять с жестко закреп ленным ковшом и подъемный канат, с траверсой, которая шарнирно соединена с ковшом 22 . Недостатком такого оборудования является невозможность его использования для захвата негабаритов неправильной геометрической формы. Цель изобретения - расширение тех Нологических возможностей экскаватора. Поставленная цель достигается тем/ что ковш снабжен шарнирно соеди ненными с его боковыми стенками ры чажными захватами, которые посредством шарнирных тяг связаны с траверсой, при этом шарниры соединения тяг с траверсой и захватами выполнены универсальными. Захваты имеют шарнирно закрепленные на их свободных концах двуплечие зажикм, а тяги выполнены регулируе мыми по длине. На фиг. 1 изображено предлагаемое рабочее оборудование экскаватора; на фиг. 2 - ковш, вид сбоку; на фиг. 3 - то же, вид сверху. Рабочее оборудование включает стрелу 1, рукоять 2, ковш 3 сбоковыми стенками 4, к которьвл шарнирно присоединены захваты 5 с двуплечими зажимами б. Захваты 5 тягами 7 соединены с траверсой 8/ на уравнительном блоке 9 которой запасован подъемный канат 10. Тяги 7 соединены с захватами 5 и траверсой в универсальными шарнирами;11. . Рабочее оборудование экскаватора работает следукщим образом. ковш 3 опускается на грунт, и траверса 8 поворачивается вниз под действием собственного веса, при этом тяги 7 толкают захваты 4 и разводят их в стороны. Затем ковш 3 рукоятью 2 подводится под негабарит так, чтобы зубьямизацепить его снизу, и за траверсу 8 канатом 10 начинается подъем 3. При этом траверса 8 повор чивается вверх и тягами 7 сводит захваты 5 до захвата негабарита. При дальнейшем подъеме поворачивается руко(Ять 2, и ковш 3 вместе с захватами 5 и захваченным негабаритом поднимается на требуемую высоту. I Опускание и разжим негабарита про изводится в обратном порядке. После очистки забоя от негабаритов захват снимается, и рабочее оборудование экскаватора используется по прямому назначению., Применение навесного приспособле ния позволяет использовать экскаватор для погрузки негабаритов. Отпадает необходимость вывода экскавато ра из забоя и потребность в грузоподъемных средствах. . Формула изобретения 1. Рабочее оборудование экскаватора типа прямая лопата, включающее стрелу, рукоять с жестко закрепленнъял ковиюм и подъемный канат с траверсой, шарнирно соединенной с ковшом, отличающееся тем, что, с целью расширения технологических возможностей, ковш снабжен шарнирно соединенными с его боковыми стенками рычажньели захватами, которые посредством шарнирных тяг связаны с траверсой, при этом шарниры соединения тяг с траверсой и захватами выполнены универсальными. 2.Оборудование по п. 1, о т л ич а ю щ. е -е с я тем, что Зс1хваты имеют шарнирно закрепленные на их свободных KOHUeix двуплечие зажимы. 3.Оборудование по пп. 1 и 2, о т л и ч ающе ее я тем, что шарнирные тяги выполнены регулируемыми по длине. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 469796, кЛ. Е 02 F 3/38, 1973. 2.Кох П.И. Одноковшовые экскаваторы. М., Машгиз, 1963, с. 57 (прютотип),
