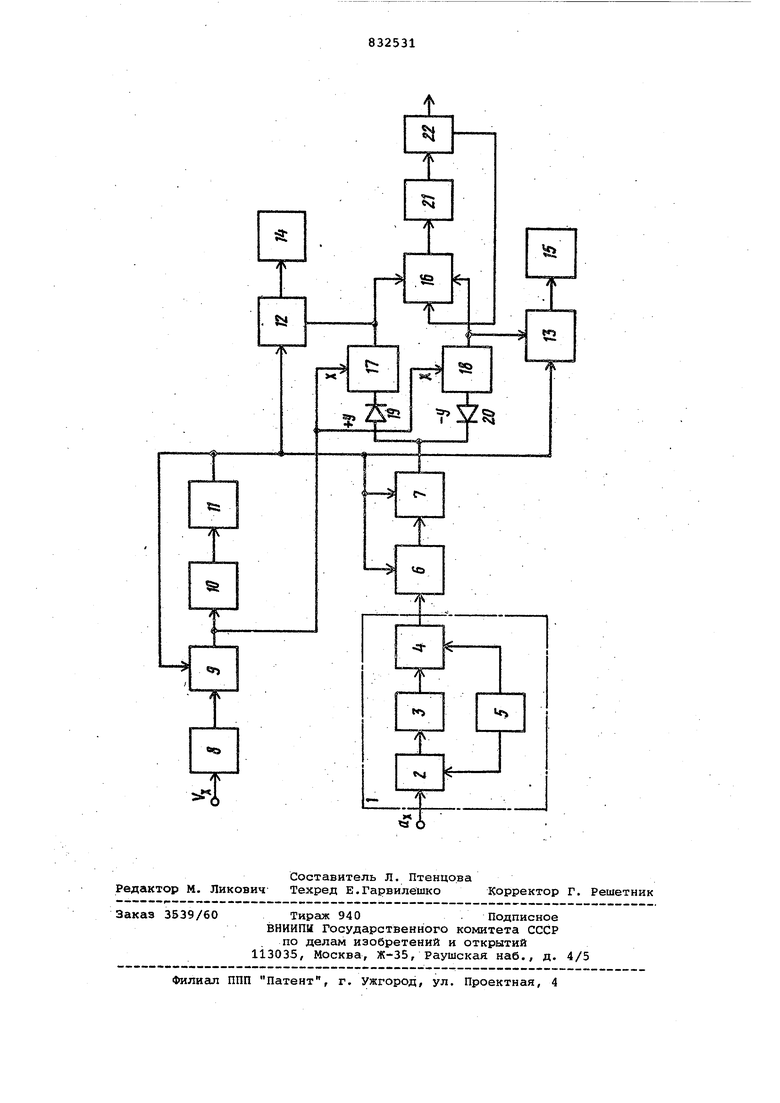
ускорений, выход которого подключен ко входу последовательно соединенных .первого и второго интегрирующих усилителей, блок памяти, к выходам кото рых подключены индикаторы, последовательно соединенные элемент сравнения, усилитель мощности и привод руля Гз. Однако известный прибор, предназначенный лишь для измерения скоростей или ускорений в элементах конструкций, не обеспечивает достаточной точности измерения бокового смещения движения сельхозагрегата. Цель изобретения - повышение точности устройства. Поставленная цель достигается тем что устройство для измерения бокового смещения и управления устойчивостью движения сельскохозяйственного агрегата по постоянной траектории содержащее измеритель боковых ускорений, выход которого подключен ко входу последовательно соединенных первого и второго интегрирующих усилителей, блоки памяти, к выходам которых подключены индикаторы, последо вательно соединенные элемент сравнения, усилитель мощности и привод рул оносодержит делители и последовательно соединенные датчик скорости агрега.та, третий интегрирующий усилитель, пороговый элемент и реле-ком мутатор, выход которого подключен к первым входам блоков памяти, вторые входы которых соединены с первыми входами элемента сравнения и выходами делителей , Первыми входами связан ных с выходом второго интегрирующего усилителя, а вторыми входами - треть его интегрирующего усилителя, причем выход реле-коммутатора подключен ко вторым входам первого, второго и третьего интегрирующихусилителей, На чертеже представлена схема предлагаемого устройства. Устройство содержит измеритель 1 боковых ускорений, состоящий из последовательно соединенных индуктивно го датчика 2 ускорений, установленного на сельхозагрегате с ориентиров кой по направлению бокового смещения усилителя 3, Фазового детектора 4 и генератор 5, питающего датчик 2 и детектор 4. Выход измерителя 1 боковых ускорений подключен ко входу последовательно соединенных первого и второго 7 интегрирующих усилителей Датчик 8 скорости агрегата включен н вход третьего интегрирующего усилит ля 9, выход которого подключен ко вх ду порогового элемента 10, соединен ного со входом реле-коммутатора 11, выход его подключен к первым входам блоков 12 и 13 памяти, к выходам ко торых подключены индикаторы 14 и 15 Вторые входы блоков 12 и 13 памяти соединены с входами элемента 16 сра нения и выходами делителей 17 и 18. елители 17 и 18 первыми -входами чеез диоды 19 и 20, включенными пааллельно и разнонаправленно, связаы с выходом второго интегрирующего силителя 7, а вторыми входами - с ретьим интегрирующим усилителем 9. ыход реле-коммутатора 11 подключен ко вторым входам первого 6, второго 7 и третьего 9 интегрирующих усилителей. Выход элемента 16 сравнения подключен к последовательно соединенным усилителю 21 мощности и приводу 22 руля. Устройство работает следующим образом. Датчик 8 скорости агрегата, установленный на колесе агрегата или трактора, вырабатывает электрический сигнал, пропорциональный скорости движения сельхозагрегата вдоль поля координата X, который интегрируется третьим интегрирующим усилителем 9 и как сигнал перемещения а грегата вдоль поля одновременно поступает на вторые входы делителей 17 и 18 и на вход порогового элемента 10. При перемещении сельхозагрегата вдоль Поля сигнал на входе порогового элемента 10 достигает величины напряжения срабатывания, пороговый элеменр 10 переключается и приводит в действие электронное реле-коммутатор 11, которое управляет переключателями блоков 12 и 13 памяти и возвратом интегрирующих усилителей 6, 7 и 9 в начальное (нулевое) положение. Величина перемещения агрегата вдоль поля, по которой проводится одно измерение и фиксируется результат, определяется с помощью регулировки напряжения срабатывания порогового элемента 10. Затем цикл измерения повторяется. При движении агрегата вдоль поля с отклонением от прямолинейной траектории возникающее боковое ускорение агрегата преобразуется индуктивным датчиком 2, усилителем 3 и фазовым детектором 4 в соответствующий электрический сигнал, интегрируется дважды усилителями 6 и 7 и предстает как сигнал, пропорциональный боковому смещению сельхозагрегата. Для величины и направления относительного бокового смещения сельхозагрегата от начального положения на определен:ном отрезке поля сигнал разделяется |по полярности напряжения с помощью ДИОДОВ 19 и 20 и поступает соответственно на первые входы делителей 17 и 18. С выходов делителей 17 и 18 сигналы, пропорциональные относительному боковому смещению агрегата, т.е. нормированные по сигналу, пропорциональному перемещению агрегата вдоль поля, поступают соответственно на вторые входы блоков 12 и 13 памяти и парсшлельно на первые входы элемента 16 сравнения. С выхода блоков 12 и 13 памяти сигналы поступают на индикаторы 14 и 15 соответственно. С выхода элемента 16 сравнения разностью сигнал, пропорциональный величине бокового смещения сельхозагре гата от первоначального Положения, поступает, на вход усилителя 21 мощности, усиливается и включает в действие привод 22 руля электрогидравли ческой системы рулевого управления, восстанавливакхций заданное положение сельхозагрегата. Привод 22 руля и усилитель 21 мощности охвачены обрат ной связью по величине угла поворота рулевого механизма сельхозагрегата на второй вход элемента 16 сравнения для повышения качества работы устрой ства. Предлагаемое устройство повышает точность .измерения бокового .смещения и управления устойчивостью движения сельхозагрегата, в результате чего уменьшаются отклонения от постоянной траектории при движении агрегата относительно рядов обрабатываемых сель кохозяйственных культур и тем самым снижается процент их повреждений. . Формула изобретения Устройство для измерения бокового смещения и управления устойчивостью движения сельскохозяйственного агрегата по постоянной траектории, содер жащее измеритель боковых ускорений. выход которого подключен ко входу последовательно соединенных первого и второго интегрирующих усилителей/ блоки памяти, к выходам которых подключены индикаторы, последовательно соединенные элемент сравнения, усилитель мощности и привод руля, о т личаюрееся тем, что, с целью повышения точности устройства, оно содержит делители и последовательно соединенные датчик скорости агрегата, третий интегрирукядий усилитель, пороговый элемент и релекоммутатор, выход которого подключен к первым входам блоков памяти, вторые входы которых соединены с первыми входами элемента сравнения и выходами делителей, первыми входами связанных с выходом второго интегрирующего усилителя, а вторыми входами - третьего интегрирующего усилителя, причем выход реле-коммутатора подключен ко вторым входам первого, второго и третьего интегрирующих усилителей. Источники информации, приня.тые во внимание при экспертизе 1.Патент США № 3797602,. кл. 180-79, 1974. 2.Авторское свидетельство СССР W 323087, кл. А 01 В 69/04, 1972. 3.Справочник Приборы и системы для измереня вибраций шума и удара. М., Машиностроение., 1978, том 1, с. 480 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением самоходного агрегата | 1987 |
|
SU1535404A1 |
| Система управления электрогидравлической рулевой машиной | 1988 |
|
SU1615059A1 |
| Система управления агрегатом правки цилиндрических изделий | 1981 |
|
SU1074621A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СИММЕТРИЧНОЙ РАКЕТОЙ | 2007 |
|
RU2374602C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Система управления правильнымАгРЕгАТОМ | 1978 |
|
SU804070A2 |
| Устройство для контроля и учета работы формовочного агрегата для производства абразивного инструмента | 1982 |
|
SU1067519A1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
| Устройство для погрузки сыпучих материалов в железнодорожные транспортные средства | 1978 |
|
SU768735A1 |