Известны механические погрузчики сыпучих материалов периодически загружающие транспортеры. В результате этого происходит неравномерная загрузка транспортеров.
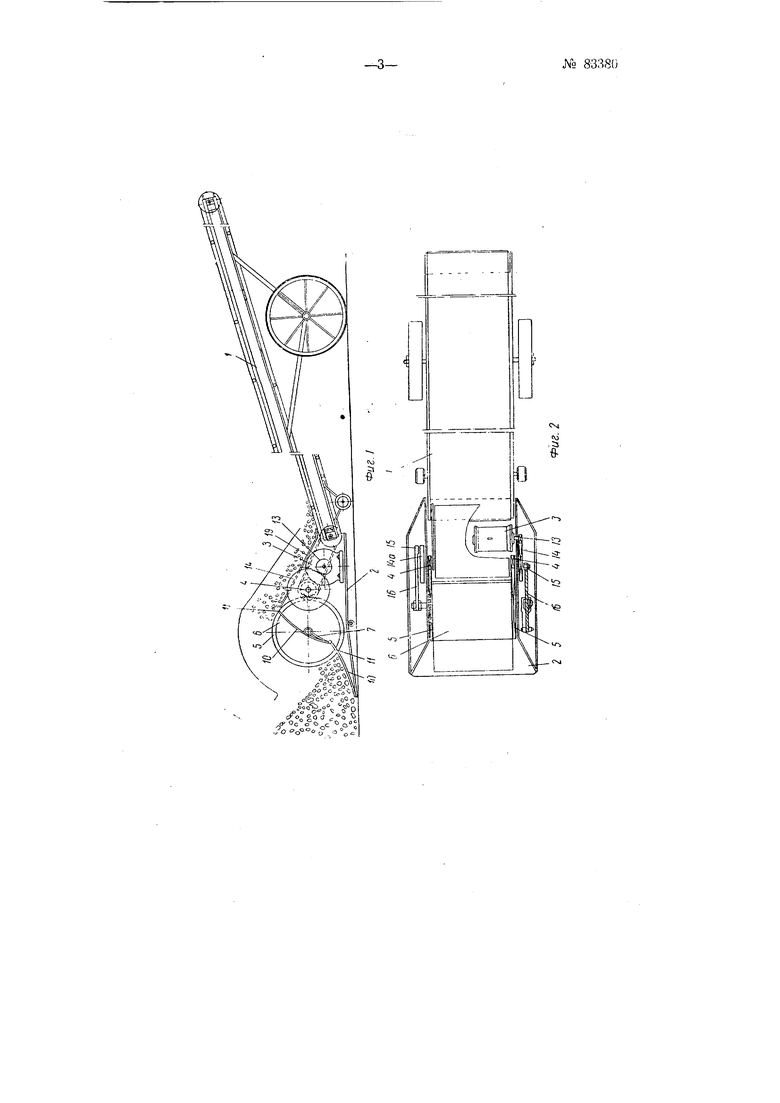
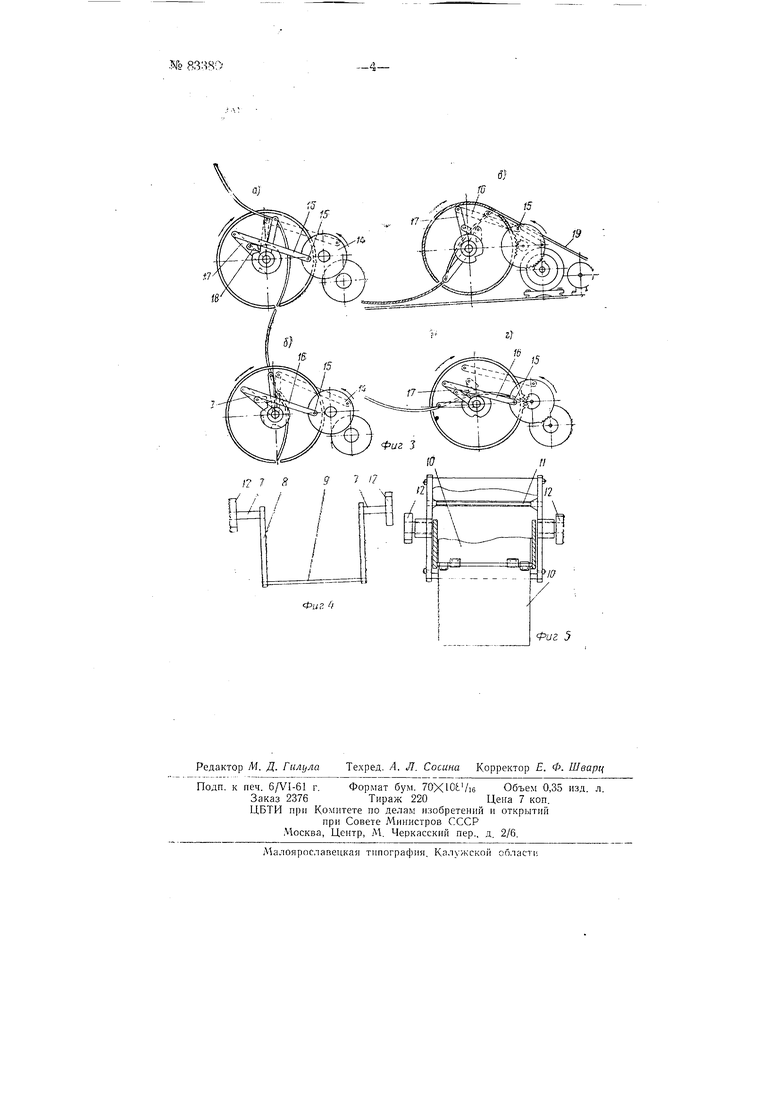
В описываемом погрузчике этот недостаток устранен. На фиг. I изображена установка-вид сбоку; на фиг. 2 - то же, в плане; на фиг. 3 (а, б, 8, и г) изображена кинематическая схема работы механического погрузчика; па фиг. 4 и 5 - схемы кривошипа и его шарнирного соединения с зачерпываюш.ими лопатами.
Ленточный транспортер / (фиг. 1 и 2) соединен с механическим погрузчиком в одну обшую установку.
На стальной плите 2 установлен электродвигатель 3, передающий вращение через пару шестерен 13 и 14 шестерня-м 4, сцепленным с зубчатыми венцами 5, насаженными на пустотелый барабан 6. Полуоси 7 барабана внутри «го переходят в коленчатую форму (фиг. 4), составленную из двух кривошипов 8, соединенных между собой валом 9.
На вал 9 одним своим краем шарнирно подвешены две лопаты 10, а другим краем они входят в продольные прорези // обечайки цилиндра, расположенные на диаметрально противоположных сторонах его.
Цилиндр 6 насажден йа полуоси 7 свободно, однако при врашении цилиндр увлекает с собой входящие в его продольные прорези 11 обе лопаты 10, а с ними и весь кривошипный механизм и полуоси 7, уложенные в .подшипники (на чертеже не показаны).
На концах полуосей 7 жестко насажены две шайбы 12 с выбранным на каждой из них одним зубцом. На шестерне М и посаженной на тот же вал с другого конца шайбе 14-а закреплены кривошипные -пальцы 15, соединенные тягой 15 с концами рычагов 17, свободно посаженных на полуоси 7 (фиг. 3). На рычагах 77 .посажены собачки 18, которые при определенных положениях кривошипного пальца 15 входят в зацепление с зубцом на шайбе 12.
,NL 83380---2-
При это собачка 18, опираясь в зубец шайбы 12, начинает нередвигать последнюю, а вместе с ней и весь кривошипный механизм 8 и вал 9 относительно барабана, продвлжающего вращаться с прежней окружной скоростью. Кривошипный механизм о пережает движение барабана и заставляет одну из лопат (наружную) войти внутрь барабана, а другую (внутреннюю) выйти из него. Механизм монтируется таким образом, чтобы в момент, когда прорезь 11 цилиндра находится внизу, лопата начинает выходить из нее, а через прорезь, находяшзюся наверху, начинает входить внутрь цилиндра. Выходя из цилиндра, лопата производит зачерпывание материала и, двигаясь с цилиндром дальше, поднимает зачерпнутый материал. Проходя к верхнему положению, материал постепенно начинает осыпаться с на плиту 19, а с нее - на ленту транспортера. Палец 15 тягой 16 соединен с рычагом 17 таким образом, что при одном полном обороте пальца 15 рычаг 17 делает одно колебание в)перед и одно колебание назад. Благодаря этому при движении рычага 17 влеред собачка 18 сцепляется с зубом шайбы 12, а при движении рычага назад собачка выходит из зацепления с зубом и свободно скользит по поверхности шайбы, которая с момента отхода собачки продолжает свое вращение вместе с цилиндром с одинаковой с ним угловой скоростью.
Таким образом, помещенный внутри цилиндра кривошипный механизм с лопатами часть своего лути совершает под воздействие.м цилиндра с одинаковой с ним угловой скоростью. На другой части пути на механизм воздействует рычаг 17 через собачку 18. Этим создается относительное движение кривошипа относительно цилиндра, что обусловливает выдвижение из цилиндра лопаты и зачернывание ею материала. На фиг. 3 показаны последовательные положения обеих лопат при полном обороте цилиндра. Из положения г лопаты переходят в положение а и тот же цикл повторяется со второй лопатой.
Предмет изобретения
1.Механический погрузчик с самозаполняющимися лопатами для погрузки сыпучего или кускового груза на ленточный транспортер для дальнейшей подачи его на автомашину или иной транспортный механизм, отличающийся тем, что, с целью более равномерной подачи груза на ленточный транспортер, он оснащен двумя лопатами, .поочередно вьгдвБгаемыМи из пустотелого вращающегося с постоянной скоростью -барабана и обратно втягиваемыми и производящими за один оборот барабана два зачерпывания.
2.Механический погрузчик по п. 1, отличающийся тем, что, с целью выдвигания из цилиндра лопат и обратного втягивания их внутрь вращающегося цилиндра, он оснащен кривошипом, который часть кругового движения совершает вместе с цилиндром с одинаковой угловой скоростью, а другую часть с большей скоростью, опережающей скорость цилиндра.
)оо
ogpc - о о°0
Soot) о ,
. ° S
сГо 00 а °о U
0о°о°0 /«
./о а
7 83 7 //
Фиг fi
19
Фиг 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Промежуточный бункер устройства для дозирования облицовочной и наполнительной смесей | 1980 |
|
SU908472A1 |
| Машина для изготовления фашин | 1948 |
|
SU79766A1 |
| Передвижная механическая лопата | 1937 |
|
SU54455A1 |
| ПЛАНЕТАРНЫЙ МОТОР-КОМПРЕССОР | 1993 |
|
RU2095578C1 |
| Автомат для выпрессовывания колпачков из ленты алюминиевой фольги и укупорки ими молочных булылок | 1958 |
|
SU123857A1 |
| Центробежная машина для формовки, преимущественно, бетонных изделий | 1937 |
|
SU58243A1 |
| Устройство для мытья бутылок | 1930 |
|
SU25416A1 |
| Устройство для съема початков и надевания патронов на веретена прядильных и крутильных машин | 1972 |
|
SU445714A1 |
| СКРЕПЕР | 2007 |
|
RU2348761C1 |
| Кузов для грузовых повозок | 1940 |
|
SU62231A1 |