(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФУНКЦИЙ ЧУВСТВИТЕЛЬНОСТИ СИСТЕМ АВТОМАТИЧЕСКОГО
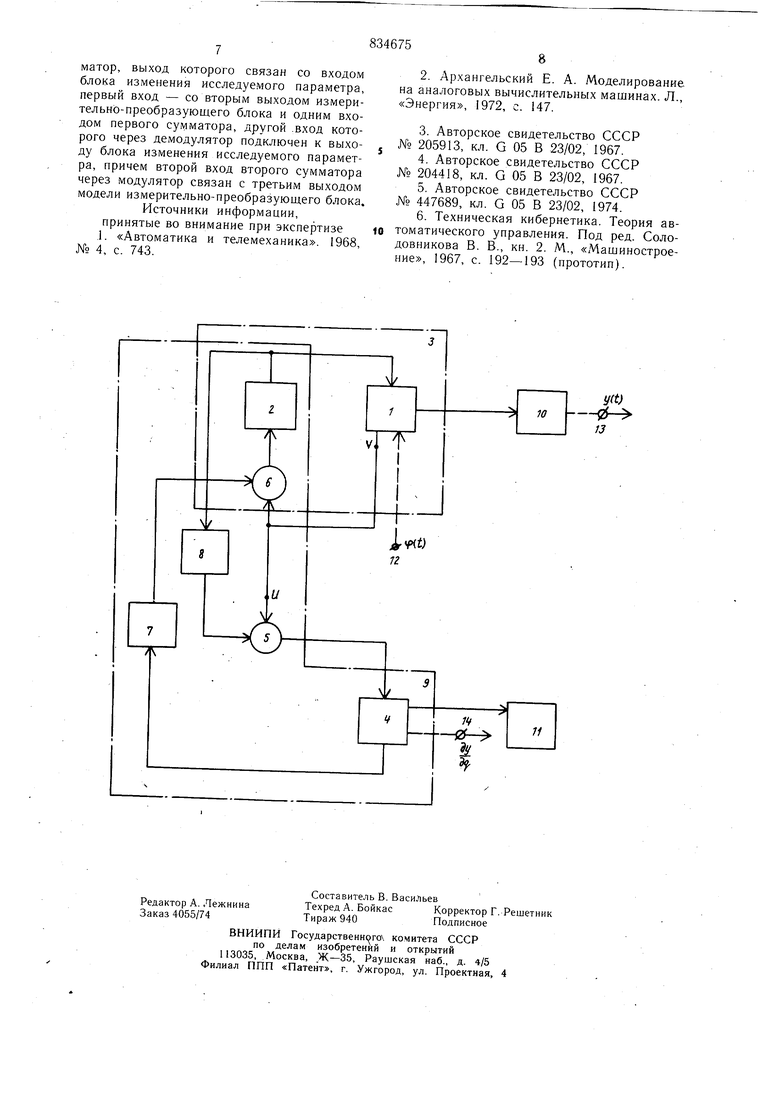
УПРАВЛЕНИЯ блоку, регистрирующему функцию чувствительности 2. Недостатком такого устройства является то, что каждый коэффициент модели системы влияет на несколько функций чувствительности, получаемых с этой модели, поэтому его изменение должно производиться в соответствии с изменением нескольких параметров системы, что, в свою очередь, требует введения механических или электрических дифференциалов в исполнительные устройства:Известно устройство для экспериментального определения функций чувствительности, в котором для получения функций чувствительности используется либо сама система, работающая на постоянном токе, либо ее аналог, набраннь1Й на АВМ, причем вместо модели системы применяется блок постоянного запаздывания типа БПЗ-1 с последующим использованием самой системы или ее модели на АВМ 3. Таким о.бразом, на вход исследуемой системы .подается внешнее воздействие, причем ко входу исследуемой системы подключен блок с передаточной функцией, зависящей только от того параметра, влияние которого определяется в данный момент, а к выходу - блок постоянного запаздывания, который задерживает сигнал с выхода исследуемой системы на промежуток времени, достаточный для затухания переходного процесса. Недостатки указанного устройства обусловлены наличием дополнительной аппаратуры в виде блока задержки. Блок задержки типа БПЗ-1, хотя и входит в комплект АВМ МН-7, является достаточно громоздким. Кроме того, в случае инерционных систем время задержки должно быть достаточно велико |(2-5 с) и, хотя реализовать такую линию задержки возможно, например на магнитофоне, это требует дополнительного преобразующего оборудования для согласования частотных характеристик сигналов исследуемой системы и магнитофона: Для систем на переменном токе необходимо кроме БПЗ-1 иметь дополнительные преобразующие устройства (модуляторы и демодуляторы), что увеличивает объем дополнительной аппаратуры. Устройство не работоспособно в нестационарных системах. Известно устройство для определения функций чувствительности, в котором установлены две модели исследуемой системы автоматического управления и блок с передаточной функцией, зависящей только от того параметра, влияние которого на динамические характеристики системы определяется в данный момент времени, причем на вход первой модели подается входное воздействие, вход блока варьируемого параметра подключен к выходу аналогичного звена другой модели, а выход второй модели подключен ко входу блока с передаточной функцией, зависящеи только от того параметра, влияние которого определяется 4. Однако это устройство не работоспособно в нестационарных системах автоматического управления. Известно устройство для экспериментального определения характеристик систем автоматического регулирования , которое может быть использовано для измерения функций чувствительности к вариа-циям параметров в нестационарных линейных системах аналоговых модулирующих установок. Устройство содержит двухпозиционный пере-, ключатель, подвижный контакт которого связан со входом сопряженной модели исходной системы, выход задающего блока подключен к одному, а выход сопряженной модели чувствительности - к другому неподрижному контакту двухпозиционного переключателя, измеритель разности фаз, измеритель амплитуды и два консервативных звена с регулируемой резонансной частотой, выходы которых связаны с соответствующими входами измерителя разности фаз, причем выход задающего блока подключен ко входу первого консервативного звена с регулируемой резонансной частотой, выход сопряженной модели исходной системы связан со входом второго консервативного звена с регулируемой резонансной частотой, я выход последнего соединен со входом измерителя амплитуды 5. Недостатки устройства - больщое количество сложной дополнительной аппаратуры и наличие электромеханических устройств. Наиболее близким к предлагаемому является устройство для определения функций чувствительности систем автоматического управления, содержащее последовательно соединенные первый сумматор, модель измерительно-преобразующего блока и одель объекта управления, последовательно соединенные блок изменения исследуемого параметра и измерительно-преобразующий блок, выход которого связан с объектом управления, второй вход - со входом устройства, выход которого соединен со вторым выходом модели измерительно-преобразующего блока. Недостатки устройства объясняются тем, что требуется строгая идентичность при реализации параметров в двух аналоговых моделях исследуемого элемента; это, в свою очередь, не позволяет получать функции чувствительности при априорно неизвестных, произвольных значениях исследуемого параметра. Нельзя определять функции чувствительности, если исследуемый параметр.нестационарен. Кроме того, нельзя определять функции чувствительности реальной системы, что делает невозможным использование устройства в контурах настройки и самонастройки систем беспоисковой градиентной оптимизации и в системах параметрического контроля. Ноль изобретения - повышение точнос м-:роГ:с1ва при произвольном, априорно :(зиестном значении исследуемого параметЛоставленная цель достигается тем, что предлагаемое устройство содержит модуля,тор. демодулятор и второй сумматор, выход ixOToporo связан со входом блока изменения исследуемого параметра, первый вход - со вторым выходом измерительно-преобразующего блока и одним входом первого суммат.;ра, другой вход которого через демодулятор подключен к выходу блока изменения исследуемого параметра, причем второй вход второго сумматора через модулятор связан с третьим выходом модели измерительно-преобразующего блока. На чертеже изображена функциональная схема устройства. - Устройство содержит измерительно-преобразующий блок 1, блок 2 изменения исследуемого параметра, которые в совокупности представляют регулятор 3, модель 4 измерительно-преобразующего блока, сумматоры 5 и 6, модулятор 7, демодулятор 8, которые в совокупности с блоком 2 изменения исследуемого параметра представляют модель 9 регулятора, объект 10 управления и модель 11 объекта управления. Вход 12 измерительно-преобразующего блока 1 является входом устройства, на выходе 13 объекта 10 управления регистрируют временную характеристику системы у(t). а на выходе 14 модели 4 измерительно-преобразующего блока регистрируют искомую функцию чувствительности dY((j,. Модулятор 7 и демодулятор 8 работают на одной опорной частоте, которая выще полосы пропускания системы автоматического управления. Блок 2 изменения исследуемого параметра, т.е. элемент, влияние которого исследуется, включен в два контура. Первый контур образован блоком 2, измерительно-преобразующим блоком 1, сумматором 6 и объектом 10 управления, второй контур образован также блоком 2, демодулятором 8, сумматором 5, моделью 4 измерительно-преобразующего блока , модулятором 7, сумматором 6 и моделью .11 объекта управления. В силу того,что блок 2 изменения исследуемого параметра безынерционный, он работает в обоих названных контурах независимо, т.е. в каждом из этих контуров он работает в различных не пересекающихся друг с другом частотных диапазонах, а именно: в первом контуре - в полосе частот пропускания системы, во втором контуре преобразует вьь сокочастотный сигнал опорной частоты мо дулятора 7. При подаче входного сигнала Y(t) на вход 12 измерительно-преобразующего блока 1 в точке V, соответствующей входу бло-. ка 2 изменения исследуемого параметра в регуляторе 3, имеем сигнал, изображение по Лапласу которого /(р)(Р) ()(} („р(р) -передаточная функция от входа 12 до точки V первого контура;f(p) -изображение по Лапласу входного сигнала. Полученный сигнал y(t) подается через сумматор 5 во второй контур, при этом на выходе 14 аналоговой модели 9 регулятора получаем сигнал Z.(t), изображение по Лапласу которого №)vcp) чС(р) - передаточная функция второго контура от точки и сумматора 5, на который подается сигнал v(t), до выхода 14 модели 4 измерительно-преобразующего блока, или с учетом формулы (1) из (2) получаем .(р)трт;;чр) гз) Полученный сигнал 2(t)) действительно является функцией чувствительности первого порядка, т.е. z(t)-. Использование предлагаемого устройства позволяет, получать функции чувствительности временных характеристик реальных систем автоматического управления, работающих как на переменном, так и на постоянном токе, к изменению ее параметров, что делает возможным использование устройства в контурах настройки и самонастройки систем беспоисковой градиентной оптимизации и в системах параметрического контроля, а также определять функции чувствительности, если исследуемый параметр нестационарен. При этом сокращается объем дополнительной аппаратуры, а проведение эксперимента отличается точностью получаемых результатов. Формула изобретения Устройство для определения функций чувствительности систем автоматического управления, содержащее последовательно соединенные первый сумматор, модель измерительно-преобразу1рщего блока и модель объекта управления, последовательно соединенные блок .изменения исследуемого параметра и измерительно-преобразующий блок, выход которого связан с объектом управления, второй вход - со входом устройства, выход которого соединен со вторым выходом модели измерительно-преобразующего блока, отличающееся тем, что, с целью повыщения точности устройства, оно содержит модулятор, демодулятор и второй сумматор, выход которого связан со входом блока изменения исследуемого параметра, первый вход - со вторым выходом измерительно-преобразующего блока и одним входом первого сумматора, другой .вход которого через демодулятор подключен к выходу блока изменения исследуемого параметра, причем второй вход второго сумматора через модулятор связан с третьим выходом модели измерительно-преобразующего блока.
Источники информации, принятые во внимание при экспертизе 1. «Автоматика и телемеханика. 1968, № 4, с. 743.
2.Архангельский Е. А. Моделирование на аналоговых вычислительных машинах. Л., «Энергия, 1972, с. 147.
3.Авторское свидетельство СССР № 205913, кл. G 05 В 23/02, 1967.
4.Авторское свидетельство СССР № 204418, кл. G 05 В 23/02, 1967.
5.Авторское свидетельство СССР № 447689, кл. G 05 В 23/02, 1974.
6.Техническая кибернетика. Теория автоматического управления. Под ред. Солодовникова В. В., кн. 2. М., «Машиностроение, 1967, с. 192-193 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРАЛЬНЫЙ АКСЕЛЕРОМЕТР | 2002 |
|
RU2231796C2 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ЧАСТОТУ ИМПУЛЬСОВ | 2014 |
|
RU2546074C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ | 1984 |
|
SU1839988A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Устройство для измерения параметров резонансных контуров | 1982 |
|
SU1071972A1 |
| Управляющее устройство | 1983 |
|
SU1161916A1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2014 |
|
RU2547840C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| СПОСОБ ПОСТРОЕНИЯ СИСТЕМ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ ВЕЛИЧИН С МНОГОКОНТУРНОЙ ОБРАТНОЙ СВЯЗЬЮ (ВАРИАНТЫ) | 2020 |
|
RU2764055C1 |
