Изобретение относится к построению систем измерения физических величин компенсационного типа в составе блоков управления и навигации в составе устройств наземной и авиационно-космической техники.
Измерительные системы компенсационного типа - системы, определяющие измеряемую физическую величину по величине компенсационного усилия на узле компенсации.
В общем случае чувствительным элементом подобных систем является узел, закрепленный в приборе и создающий возмущающее воздействие, которое прямо пропорционально измеряемой величине. Далее из-за возмущающего воздействия происходит изменение одного из параметров чувствительного элемента, которое фиксируется и обрабатывается, затем формируется усилие на узле компенсации, прямо пропорциональное зафиксированному изменению параметров чувствительного элемента. По величине компенсационного воздействия определяется и измеряемая величина.
Существуют одноканальные и многоканальные системы измерения физических величин. Достоинствами одноканальных измерительных систем являются простота снятия и обработки входного сигнала. При этом необходимость изготовления чувствительных элементов для измерения каждого параметра существенно увеличивает стоимость системы управления объектом в целом.
Многоканальные измерительные системы в основном основываются на тех же принципах, что и одноканальные, но при этом имеют общий чувствительный элемент и несколько (соответствует количеству каналов измерения) датчиков фиксации изменения его параметров. Сигнал, поступающий с каждого из вышеупомянутых датчиков, подается, как и в одноканальной системе на тракт сервисной электроники, где происходит его последующая обработка, затем формируется усилие на узле компенсации, прямо пропорциональное зафиксированному изменению параметров чувствительного элемента, по которому и определяется измеряемая величина. Данные системы, как правило, измеряют одну и ту же физическую величину, которая раскладывается по нескольким осям в пространстве. Достоинством данной компоновки является компактное размещение нескольких каналов измерения в системе управления объектом. Недостатком компоновки подобной системы измерения является достаточно трудоемкое изготовление чувствительного элемента и взаимное влияние между каналами измерения, которое обусловлено физическими процессами, происходящими в самом чувствительном элементе.
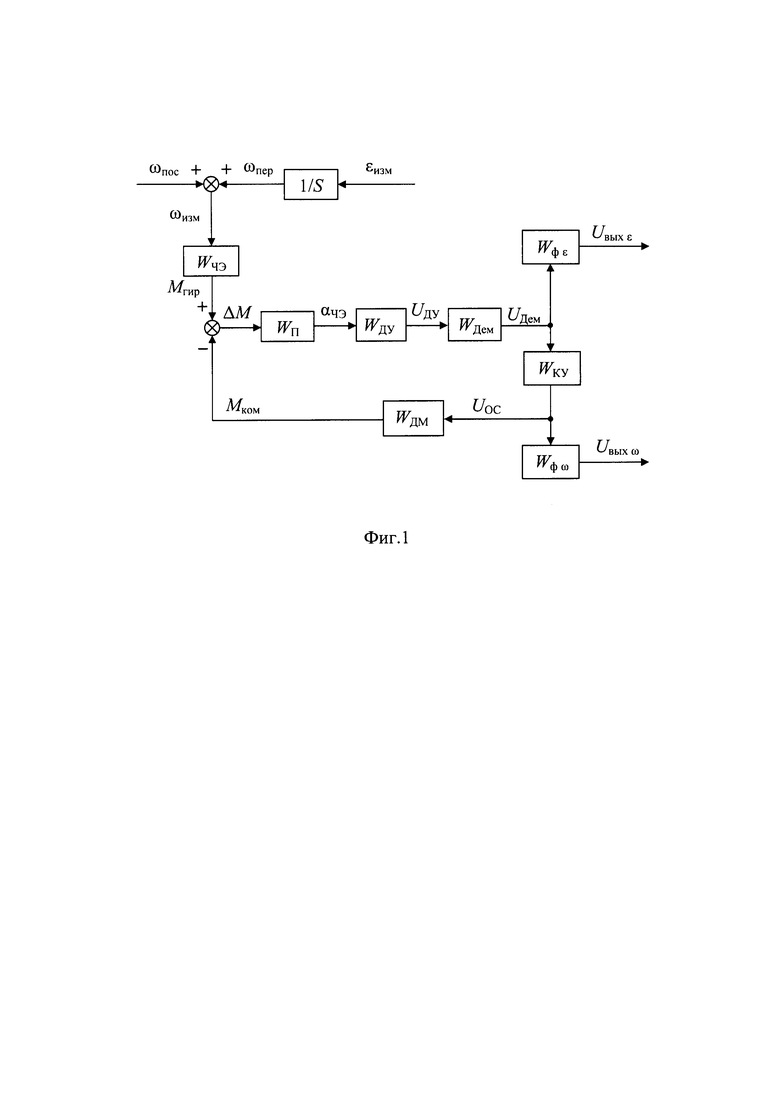
Известна конфигурация измерительной системы с двумя контурами измерения, описанная в статье А.В. Бялячкова, А.А. Гуськова, С.Ю. Юрманова «Блок измерения угловой скорости и углового ускорения на базе датчика угловой скорости компенсационного типа», опубликованной в журнале «Приволжский научный вестник», журнал №64 (2-12 2016 г.). В предложенной в данной статье компоновке контуров измерения угловой скорости и углового ускорения (фиг. 1) система измеряет два параметра объекта, проецируемые на одну и ту же ось что упрощает их обработку системой управления. При этом, последний является контуром прямого измерения, что существенно снижает его точность и устойчивость системы к внешним воздействиям в целом, и, как следствие, неточные данные для проведения обработки и вычислений бортовой цифровой вычислительной машиной.
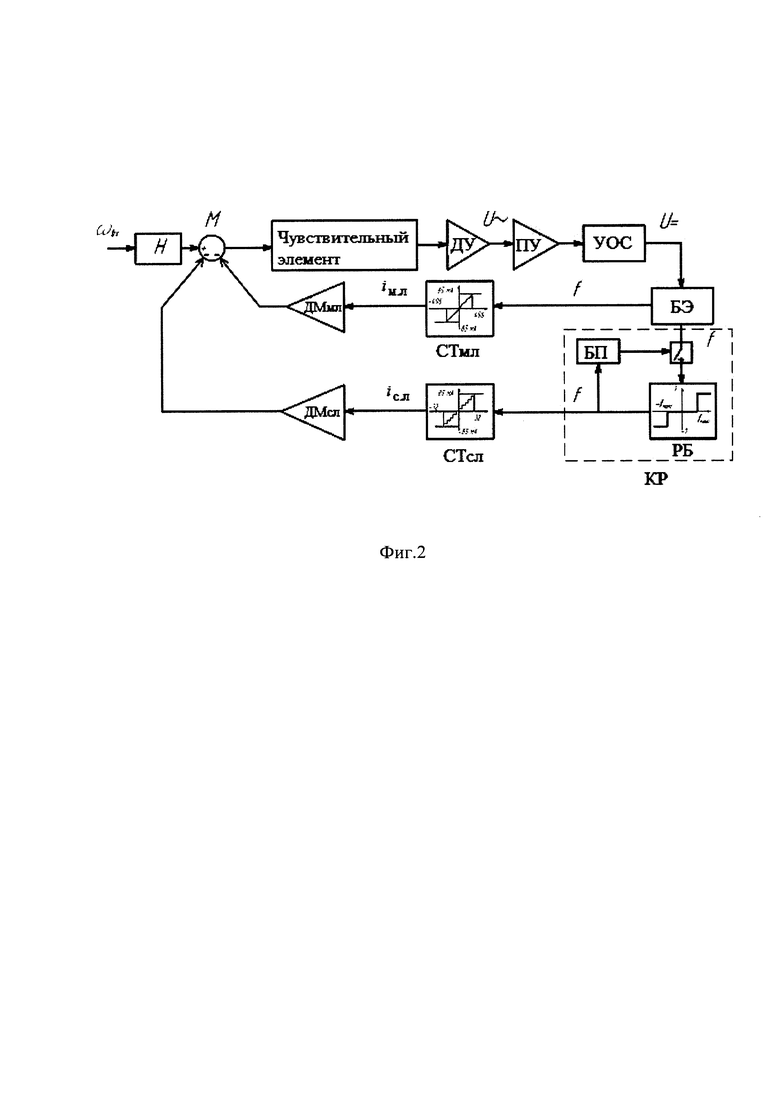
Наиболее близкой к предлагаемому способу компоновки системы измерения с несколькими контурами обратной связи является конфигурация измерительной системы с двумя контурами обратной связи, описанная в статье И.Е. Шустова, А.А. Волынцева, Б.А. Казакова «Динамика двухконтурного гироскопического измерителя вектора угловой скорости», опубликованной в вестнике МГТУ им. Н.Э. Баумана, Сер. "Приборостроение". 2012, стр. 186-192 (фиг. 2). При этом каждый контур измеряет одну и ту же величину в одинаковом диапазоне и отличается по величине компенсационного момента, что позволяет увеличить разрядность (второй контур имеет диапазон двух младших разрядов первого).
Недостатком данного способа построения является динамическая ошибка из-за ступенчатого компенсационного сигнала первого контура, данная величина учитывается математически. Частотные характеристики обоих измерительных контуров практически идентичны, а увеличенная разрядность лишь увеличивает динамическую ошибку при измерении сигнала на объекте с высокой динамикой.
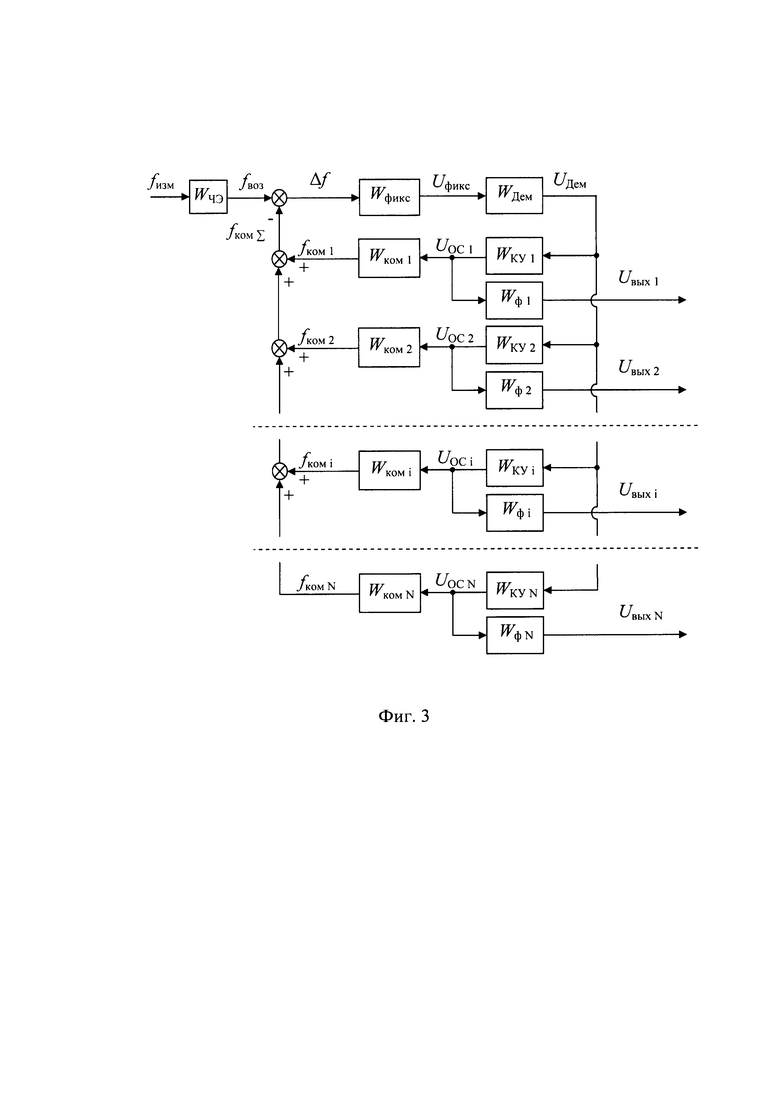
Технической задачей настоящего изобретения является создание многоконтурной измерительной системы компенсационного типа на базе существующих приборов первичной информации, конструктивное и структурное (фиг. 3) выполнение которой позволит повысить точность измерения различных физических величин.
Учитывая, что измеряемый сигнал имеет определённую величину и полосу пропускания, устройство обработки и усиления сигнала, как правило, настраивается на эти параметры. При этом высокочастотные изменения измеряемой величины вносят погрешность в точность измерения. При этом значения диапазонов низких, средних и высоких частот известны из условий эксплуатации прибора. Исходя из данных значений, можно определить оптимальные передаточные функции для каждого контура Wтр= ∑Wi, где Wi - передаточная функция замкнутого контура i-го частотного диапазона из N частотных диапазонов, при этом К1→1, KN≥0,1, Ki+1≤0,7×Ki, N≤7. Данная конфигурация позволит компенсировать внешние воздействия, не внося ошибку в основной измерительный контур.
При необходимости измерения данных величин возможен вывод информации о воздействиях, перечисленных выше, по величине компенсационного воздействия в контуре с соответствующим частотным диапазоном. При этом необходимо учитывать, что при наличии астатизма первого порядка в основном измерительном контуре величина, измеряющая изменение параметров чувствительного элемента, будет прямо пропорциональна первой производной физической величины, измеряемой первым измерительным контуром.
В дальнейшем описание изобретения поясняется схемами и графиками, на которых:
Фиг. 1 изображает структурную схему блока измерения угловой скорости и углового ускорения модели прототипа изобретения;
Фиг. 2 изображает функциональную схему двухконтурной системы обратной связи - наиболее ближайшего аналога к изобретению;
Фиг. 3 изображает структурную схему многоконтурной измерительной системы на одном датчике первичной информации согласно изобретению.
Описание и пояснение обозначений на фигурах:
Фиг. 1 ωпос - постоянная угловая скорость, действующая на ДУС по оси измерения;
ωпер - переменная угловая скорость, действующая на ДУС по оси измерения;
ωизм - измеряемая угловая скорость, действующая на ДУС по оси измерения;
εизм - измеряемое угловое ускорение, действующее на ДУС по оси измерения;
Wчэ - передаточная функция гироузла (ЧЭ);
WУП - передаточная функция упругого подвеса (УП);
Wду - передаточная функция датчика угла (ДУ);
Wдем - передаточная функция демодулятора сигнала с датчика угла;
Wку ω - передаточная функция корректирующего устройства (КУ) канала измерения угловой скорости;
Wку ε - передаточная функция КУ канала измерения углового ускорения;
Wф ω - передаточная функция R-C фильтра по на выходе контура измерения угловой скорости;
Wф ε - передаточная функция R-C фильтра по на выходе контура измерения углового ускорения;
WДМ - передаточная функция датчика (ДМ) момента контура измерения угловой скорости;
Мгир - гироскопический момент, создаваемый гироузлом под воздействием измеряемой угловой скорости;
Мком - компенсационный момент, создаваемый ДМ контура измерения угловой скорости;
ΔΜ - разница между гироскопическим и компенсационными моментами;
αчэ - угол отклонения гироузла;
UДУ - сигнал с датчика угла;
UДем - напряжение на выходе демодулятора;
Uвых ω - напряжение на выходе канала измерения по угловой скорости;
Uвых ε - напряжение на выходе канала измерения по угловому ускорению;
UОС - напряжение, подающееся на ДМ с контура измерения угловой скорости;
Фиг. 2 ωвх - входная угловая скорость;
Η - кинетический момент гироскопа;
Μ - момент, действующий на гироскоп;
U~ - сигнал переменного тока;
 - сигнал постоянного тока;
- сигнал постоянного тока;
f - сигнал частоты;
iсл - управляющий ток старшей линейки;
iмл - управляющий ток младшей линейки;
ДУ - датчик угла;
ПУ - предварительный усилитель;
УОС - усилитель обратной связи;
БЭ - блок электроники;
БП - блок прерывания;
РБ - релейный блок;
КР - контроллер;
СТсл - стабилизатор старшей линейки;
СТмл - стабилизатор младшей линейки;
ДМсл - датчик момента старшей линейки;
ДМмл - датчик момента младшей линейки;
Фиг. 3 ƒизм - воздействие, измеряемое многоконтурной системой;
ƒвоз - реакция чувствительного элемента на измеряемое воздействие;
ƒком ∑ - суммарное компенсационное воздействие на чувствительный элемент;
ƒком i - компенсационное воздействие на чувствительный элемент i-го контура компенсации;
Δƒ - разница реакции чувствительного элемента на измеряемое воздействие и суммарного компенсационного воздействия на чувствительный элемент;
Wфикс - передаточная функция элементов и узлов, фиксирующих изменение одного из параметров чувствительного элемента при реакции чувствительного элемента на измеряемое воздействие;
Uфикс - выходной сигнал (как правило, модулированный) с элементов и узлов, фиксирующих изменение одного из параметров чувствительного элемента при реакции чувствительного элемента на измеряемое воздействие;
WДем - передаточная функция демодулятора и предварительных звеньев коррекции сигнала с элементов и узлов, фиксирующих изменение одного из параметров чувствительного элемента при реакции чувствительного элемента на измеряемое воздействие;
UДем - напряжение, подаваемое с выхода демодулятора и предварительных звеньев коррекции сигнала с элементов и узлов, фиксирующих изменение одного из параметров чувствительного элемента при реакции чувствительного элемента на измеряемое воздействие;
Wф i - передаточная функция фильтра i-го контура компенсации;
WКУ i - передаточная функция КУ i-го контура компенсации;
Wком i - передаточная функция звеньев, создающих компенсационное воздействие на чувствительный элемент для i-го контура компенсации;
Uвых i - выходной сигнал с i-го контура компенсации;
UОС i - напряжение, подающееся на звенья, создающих компенсационное воздействие на чувствительный элемент для i-го контура компенсации;
Многоконтурная измерительная система представляет собой датчик первичной информации или один из измерительных каналов датчика первичной информации, если тот многоканальный, отличающийся от датчика первичной информации серийного изготовления с одним контуром тем, что имеет несколько компенсационных узлов, предварительный усилитель, выполняющий функции демодуляции и предварительной обработки сигнала, и несколько (по количеству контуров обратной связи) устройств обработки сигнала для формирования сигнала, подаваемого на компенсационный узел данного контура, и, если требуется, выходного сигнала с измерительной системы для данного частотного диапазона. Конструктивно предварительный усилитель и устройства обработки сигнала могут быть выполнены одним блоком и, при необходимости, внесены под корпус датчика первичной информации.
Структура построения многоканальных измерительных систем с несколькими замкнутыми контурами в канале измерения строится аналогично одноканальной многоконтурной измерительной системе.
Звенья коррекции, реализованные для устройств обработки сигнала, рассчитываются, исходя из требований к системе измерения по первому контуру измерения, который является основным. При наличии астатизма первого порядка в основном контуре величины воздействий компенсации на чувствительный элемент остальных контуров будут прямо пропорциональны производной первого порядка от измеряемого воздействия.
Расчет параметров корректирующих звеньев производится, исходя из требуемых передаточных функций замкнутого контура на заданный диапазон. Передаточная функция корректирующих звеньев i-го контура определяется из следующего выражения:

где Wзам i - передаточная функция i-го замкнутого контура компенсации. Исходя из этого, передаточная функция выходного сигнала с i-го контура компенсации равна:

Учитывая, что значение WКУ i может иметь достаточно сложную форму, допускается проводить кусочно-линейную аппроксимацию при условии, что величина отклонения от исходного значения не превышает 2 Дб.
Работа многоконтурной измерительной системы осуществляется следующим образом: при наличии измеряемого воздействия происходит его разделение по частотным диапазонам, при этом воздействие, компенсируемое одним из замкнутых контуров, уменьшает воздействие на оставшиеся замкнутые контуры. При необходимости информация о величине данного воздействия (особенно высокочастотного), измеренная каждым контуром в собственном частотном диапазоне, используется для списания систематических ошибок в измерительном блоке, так как измеряется воздействие, действующее непосредственно на чувствительный элемент. При введении астатизма первого порядка в основной измерительный контур величина измеряемого сигнала последующими контурами будет прямо пропорциональна первой производной для величины, измеряемой основным замкнутым контуром.
Совокупность содержащихся в материалах заявки предложений по новой структурной схеме многоконтурной измерительной системы должна обеспечить повышение точности измерения при незначительном усложнении непосредственно измерительных систем. Одновременно данные предложения позволят в дальнейшем реализовать принципиально новые алгоритмы обработки сигнала непосредственно в самой измерительной системе.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕЗОБОГРЕВНОЙ ТЕРМОИНВАРИАНТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОПЛАВКОВЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2013 |
|
RU2548377C1 |
| СПОСОБ НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ПРИБОРОВ, РАСПОЛОЖЕННЫХ НА КАЧАЮЩЕМСЯ ОСНОВАНИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2090922C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2014 |
|
RU2555215C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2010 |
|
RU2444018C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА (ВАРИАНТЫ) | 2013 |
|
RU2533750C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| РЕГУЛИРУЮЩИЙ МОДУЛЬ И УСТРОЙСТВО ДЛЯ ВОЗВРАТА В ИСХОДНОЕ СОСТОЯНИЕ ОСЦИЛЛЯТОРА, ВОЗБУЖДАЕМОГО ГАРМОНИЧЕСКИМ КОЛЕБАНИЕМ, А ТАКЖЕ ДАТЧИК МГНОВЕННОЙ УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2565516C2 |
| Компенсационный акселерометр | 2018 |
|
RU2676177C1 |
| АКСЕЛЕРОМЕТР | 2013 |
|
RU2541716C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
Изобретение относится к метрологии. Способ построения систем измерения физических величин с многоконтурной обратной связью включает в себя построение измерительной системы на одном датчике или на одном канале датчика, если тот многоканальный первичной информации с несколькими контурами обратной связи, каждый из которых рассчитан на свой частотный диапазон. При наличии измеряемого воздействия происходит его разделение по частотным диапазонам, при этом воздействие компенсируется одним из замкнутых контуров, что существенно уменьшает его влияние на оставшиеся замкнутые контуры, в том числе и основной измерительный контур. Для получения дополнительной информации об измеряемой величине существует возможность вывода выходного сигнала с остальных замкнутых контуров. Информация о величине высокочастотных воздействий может быть использована для списания ошибок в измерительном блоке, так как измеряется воздействие, действующее непосредственно на чувствительный элемент. В случае присутствия астатизма первого порядка в основном измерительном контуре величина измеряемого сигнала последующими контурами в собственных частотных диапазонах будет прямо пропорциональна первой производной для величины, измеряемой основным замкнутым контуром. Данная информация также позволят в дальнейшем реализовать принципиально новые алгоритмы обработки сигнала непосредственно в самой измерительной системе. Технический результат - повышение точности основного канала измерения. 3 з.п. ф-лы, 3 ил.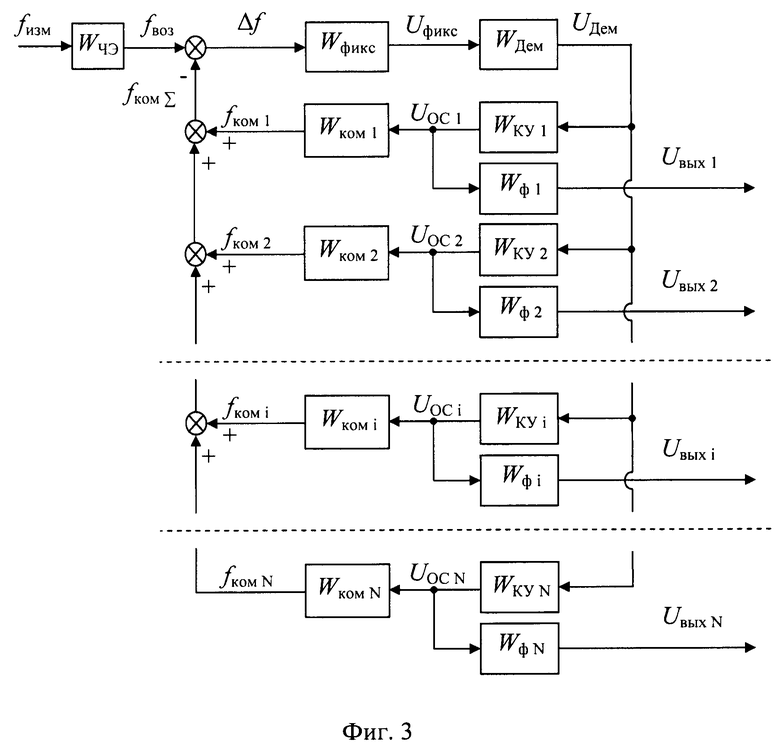
1. Способ построения многоконтурной измерительной системы на одном датчике, а также на одном из измерительных каналов датчика, если тот многоканальный, первичной информации, отличающийся тем, что каждый замкнутый контур компенсирует физическую величину, изменяющую параметры чувствительного элемента в собственном частотном диапазоне, при этом K1→1, KN≥0,1, Ki+1≤0,7×Ki, N≤7, где i - номер частотного диапазона, N - количество частотных диапазонов.
2. Способ по п. 1, отличающийся тем, что выходной сигнал, прямо пропорциональный величине, компенсирующей физическую величину, изменяющую параметры чувствительного элемента, выводится с нескольких замкнутых контуров данной системы, которые компенсируют физическую величину, изменяющую параметры чувствительного элемента в собственном частотном диапазоне.
3. Способ по п. 2, отличающийся тем, что в основном измерительном контуре вводится астатизм первого порядка, а в остальных замкнутых контурах, которые компенсируют физическую величину, изменяющую параметры чувствительного элемента в собственном частотном диапазоне, величина выходного сигнала прямо пропорциональна первой производной выходного сигнала в первом измерительном контуре.
4. Способ по п. 2, отличающийся тем, что данные с каждого замкнутого контура, которые компенсируют физическую величину, изменяющую параметры чувствительного элемента в собственном частотном диапазоне, используются для списания систематических ошибок остальных измерительных контуров системы.
| И.Е | |||
| Шустов, А.А | |||
| Волынцев, Б.А | |||
| Казаков, "Динамика двухконтурного гироскопического измерителя вектора угловой скорости", опубликованной в вестнике МГТУ им | |||
| Н.Э | |||
| Баумана, Сер | |||
| "Приборостроение" | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Пружинная погонялка к ткацким станкам | 1923 |
|
SU186A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2648930C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2489798C1 |
| АКСЕЛЕРОМЕТР | 2013 |
|
RU2526589C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2363957C1 |

