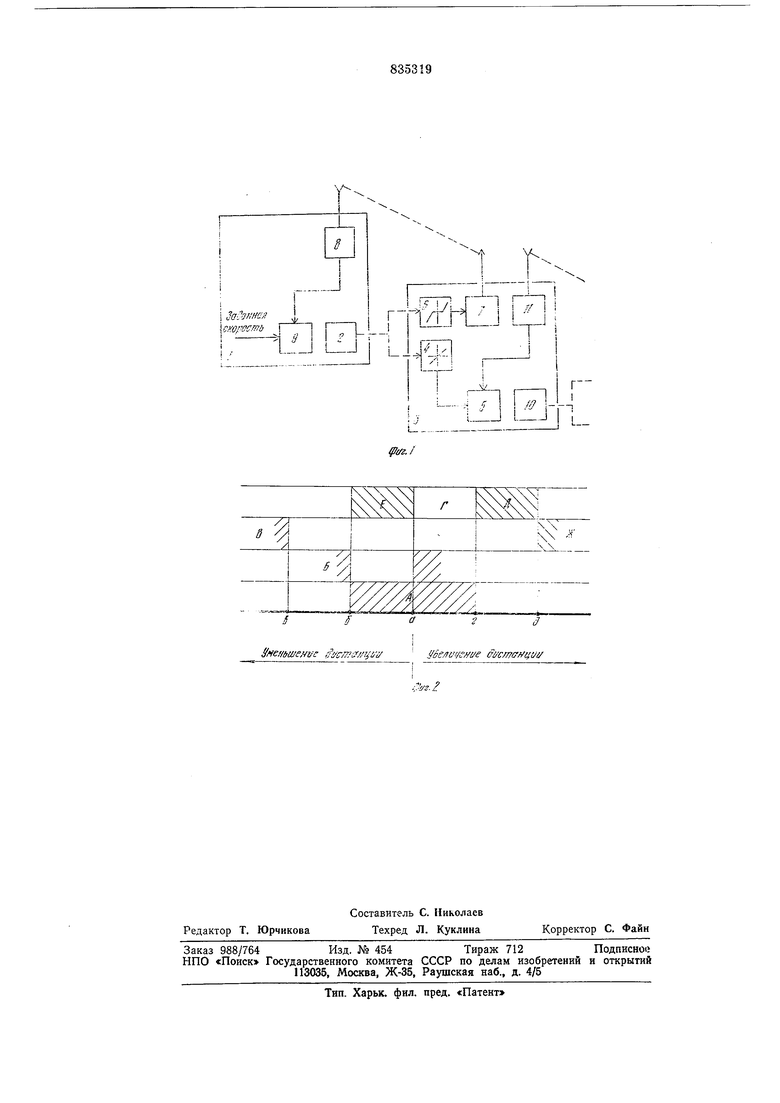
что могут изменять скорость движения этой машины только в диапазоне скоростей ниже заданной. На первой ведомой машине могут быть установлены излучатель 10 и приемник 11, преднавначенные для связи с второй ведомой машиной.
Первый канал управления работает следуюш,им образом.
В зоне А (фиг. 2), охватываюш.ей точку а номинального значения дистанции между машинами, первый канал производит изменение скоростного режима (мош,ности) двигателя ведомой машины по сигналам, величина которых пропорциональна отклонению действительного значения дистанции от номинального. Уменьшение дистанции до зоны Б свидетельствует о недостаточности этих воздействий и необходимости более активного замедления ведомой машины другими средствами. Это выполняется, например, путем включения пониженной передачи по формируемому в точке б релейному сигналу измерительного преобразователя 4 первого канала управления. Сигнал на обратное включение исходной передачи формируется при увеличении дистанции до точки а. Уменьшение дистанции до зоны В означает опасность наезда ведомой машины на ведущую. При этом в точке в формируется релейный сигнал на остановку ведомой машины.
Второй канал управления работает следующим образом.
В диапазоне дистанций между точками а и г (зона Г), где работает первый канал управления, измерительный преобразователь 6 второго канала управления имеет зону нечувствительности. Увеличение дистанции за пределы этой зоны свидетельствует о недостатке мощности двигателя ведомой машины. При этом в зоне Д через второй канал управления поступают сигналы на снижение скоростного режима двигателя ведущей машины. Сигнал на иостепенное восстановление исходного (в частности, заданного водителем) скоростного режима двигателя ведущей мащины поступает в зоне Е. Увеличение дистанции до зоны Ж свидетельствует об опасности разрыва связи меледу мащинами. При этом в точке д формируется, релейный сигнал на экстренное снижение скорости ведущей машины вплоть до ее остановки.
При различной направленности сигналов, поступающих одновременно от обоих
каналов управления к одному и тому же исполнительному механизму, предпочтение отдается сигналам на снижение скорости. Это обеспечивает работу системы без автоколебаний и исключает как столкновение, так и чрезмерное удаление машин в любых условиях движения группы.
С использованием предлагаемой системы может быть осуществлено групповое
вождение одним человеком нескольких машин, например сельскохозяйственных пахотных агрегатов. Это позволит заметно повысить производительность труда, улуччить технико-экономические показатели
агрегатов и снизить потребность в механизаторах в пиковые периоды выполнения сельскохозяйственных работ.
Предполагаемый экономический эффект применения одного автоматизированного
комплекса с двумя тракторами типа Т-150К составляет 706, а с тремя - 891 руб. за один год.
Формула изобретения
Система для автоматического управления скоростью движения группы самоходных машин, включающая устройства измеренИЯ дистанции между мащинами и исполнительные механизмы, отличающаяся тем, что, с целью поддержания постоянной дистанции между мащинами при одновременном автоматическом управлении скоростью движения головной ведуш,ей и ведомыми машинами, она содержит два канала управления с измерительными преобразователями, снабженными устройствами для пропорционального и релейного изменения сигналов, при этом измерительный преобразователь одного из каналов соединен с исполнительными механизмами управления скоростью движения ведомой машины, а измерительный преобразователь другого канала - с исполнительными механизмами управления скоростью движения ведущей мащины.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 276566, кл. А 01 В 69/04, 1969.
2.Авторское свидетельство СССР Я 354783, кл. А 01 В 69/04, 1971- (прототип).
{cf orffCffii I П
;
. 1JJ LiJ
fa2J
6e/ri/ /c//i e aifcmfrf/i ui/
iTTx
Г
jz-.
L...-, ; -Г/ i;
L.:iJ LIJ I I
(/г. /
-t, о
.;:4./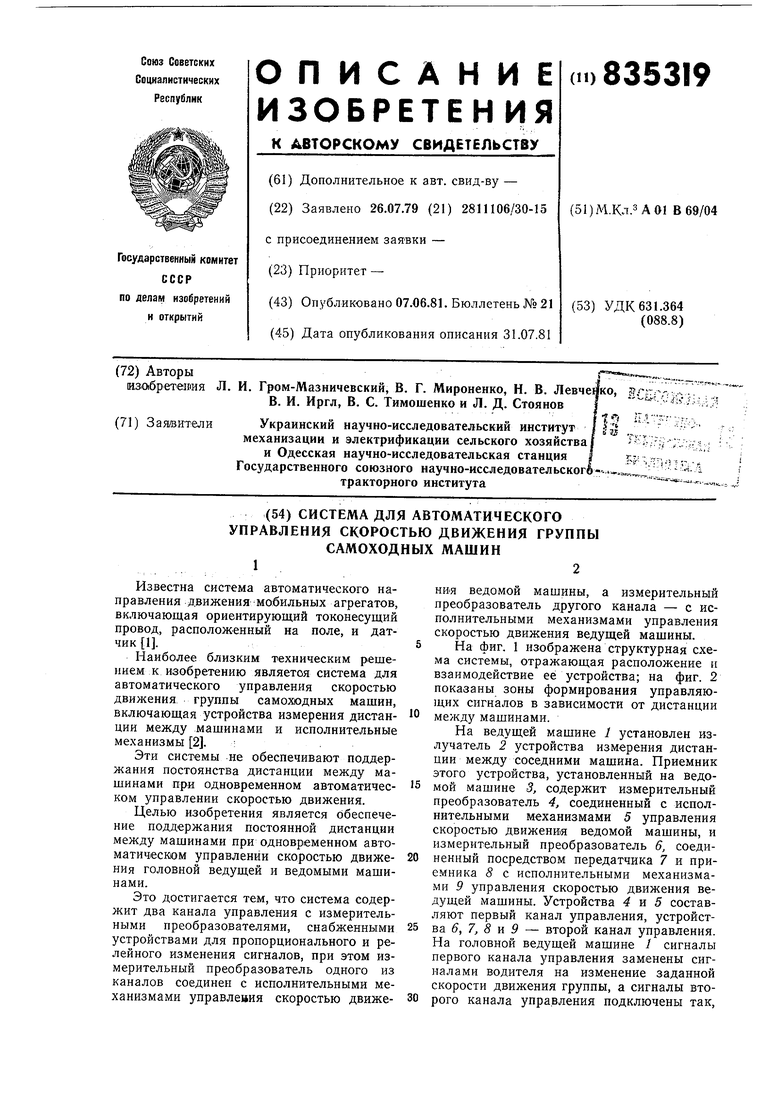
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| Устройство для автоматическогоупРАВлЕНия дВигАТЕлЕМ и бЕССТупЕН-чАТОй ТРАНСМиССиЕй ТРАНСпОРТНОгОСРЕдСТВА | 1976 |
|
SU802098A1 |
| Устройство автоматического регулирования топливоподачи транспортного дизеля | 1990 |
|
SU1714177A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТНЫМИ И НАГРУЗОЧНЫМИ РЕЖИМАМИ | 1991 |
|
RU2010734C1 |
| Система автоматического управления скоростными и нагрузочными режимами самоходной машины | 1988 |
|
SU1625723A1 |
| Устройство для позиционного управления электроприводом постоянного тока | 1981 |
|
SU1003286A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1192658A1 |
| Устройство управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1342981A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2077997C1 |
| Устройство для автоматического регулирования загрузки самоходной уборочной машины | 1985 |
|
SU1412638A1 |