1
Изобретение относится -к Области сельскохозяйственного машиностроения, в частности к средствам автоматического управления, и (предназначено для (применения «а зерноуборочных комбайнах.
Известна система автоматического вождения самоходного зерноуборочного комбайна, включающая измерительнЫй преобразователь, консоль С Пьезоэлектрическими чувствительными элементами, усилительно преобразОВательно-е устройство и исполнительный механизм 1.
Пьезоэлектрические чувствительные элементы расположены в корпусе консолн. К ним крепятся воспринимающие элементы в 1вияе игл с неакюлькими зубьями. Консоль крепится к жатке комбайна и располагается 1ПОД углом к бровке хлебостоя. При движении комбайна растения воздействуют на зубья, которые, в свою очередь, передают механическое усилие через иглы на пьезоэлементы. На выходе пьезоэлементов формируются импульсы, которые подступают на усилительно-|преобразовательное устройство.
Консоль установлена таким о,бразо.м, что при заданном направлении движения комбайна растения воздействуют нд половину чувствительных элементов, а на выходе усилительно-преобразовательного устройства величина сигнала равна половине максимально возможного значения. При этом исполнительный механизм выключен. При отклонении направления движения комбайна в ту или иную сторону растения воздействуют на большее или меньшее половины число чувствительных элементов, что обуславливает увеличение или уменьшение сигнала на выходе усилительно-преобразова,тельного устройства . Включается ис1полнительный механизм и происходит автоматическая коррекция направления движения комбайна 1.
Однако надежность системы низка, т. к.
при работе на зубья наматываются стебли растений и датчик перестает функционировать. Кроме того, данная система не может обеспечить автоматическое вождение комбайна по валку.
Целью изобретения является повышение надежности работы н обеспечение автоматического вождения как по бровке хлебостоя, так и по валку.
Поставленная цель достигается тем, что
консоль снабжена держателями, на которых посредством шарниров установлены пластины с пьезоэлектрическими датчиками, причем оси шарниров расположены параллельно консоли, а усилительно-преобразавательное устройство выполнено в виде
переключателя «валок-хлебостой и -двух блокощ, «аждый из которых сояерл ит последовательно соединенные формирователь, детектор и элемент НЕ, шричем вход первого блока соединен с одиим пьезоэлектрическИМ датчиком, а выход - с иополнительны-м механизмОМ, вход второго блока соединен с другим пьезоэлектрическим датчиком, а ВЫХОД - с контактом «валок переключателя «ВалОК-хлебостой, 1при этом ВЫход детектора второго блока соединен с контактом «хлебостой лереключателя «валок-хлебостой, а общий контакт переключателя «валок-хлебостой соединен С исполнительным мехаНИЗмом.
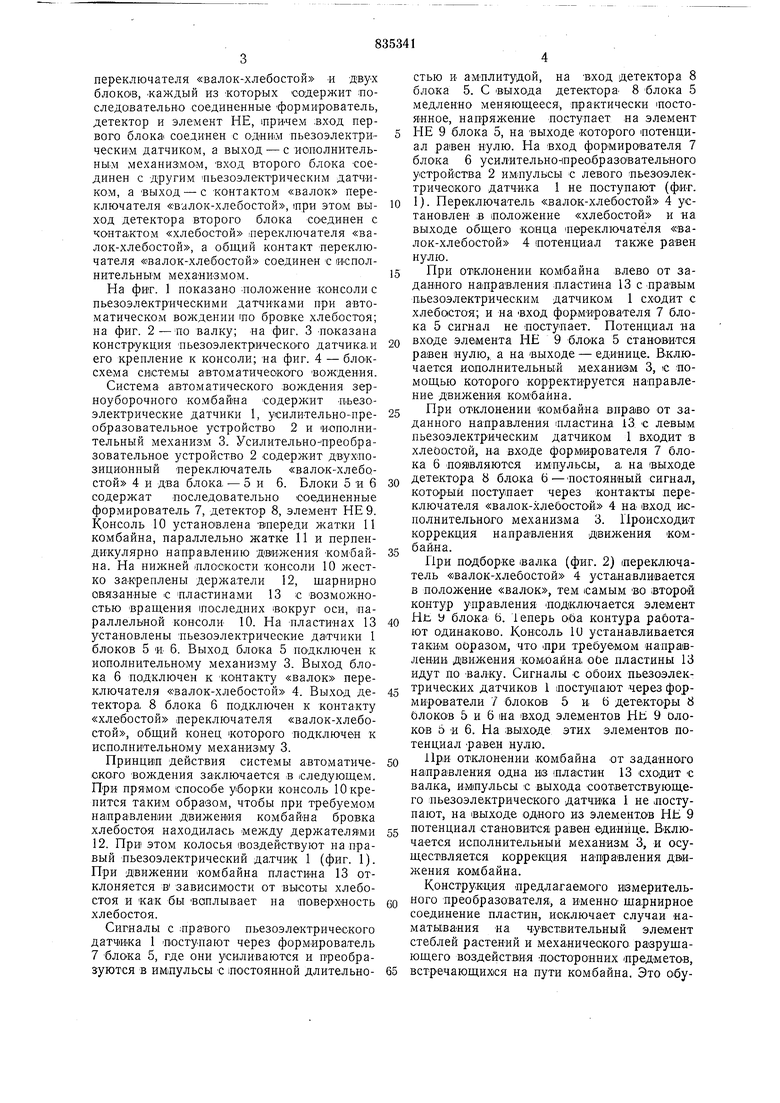
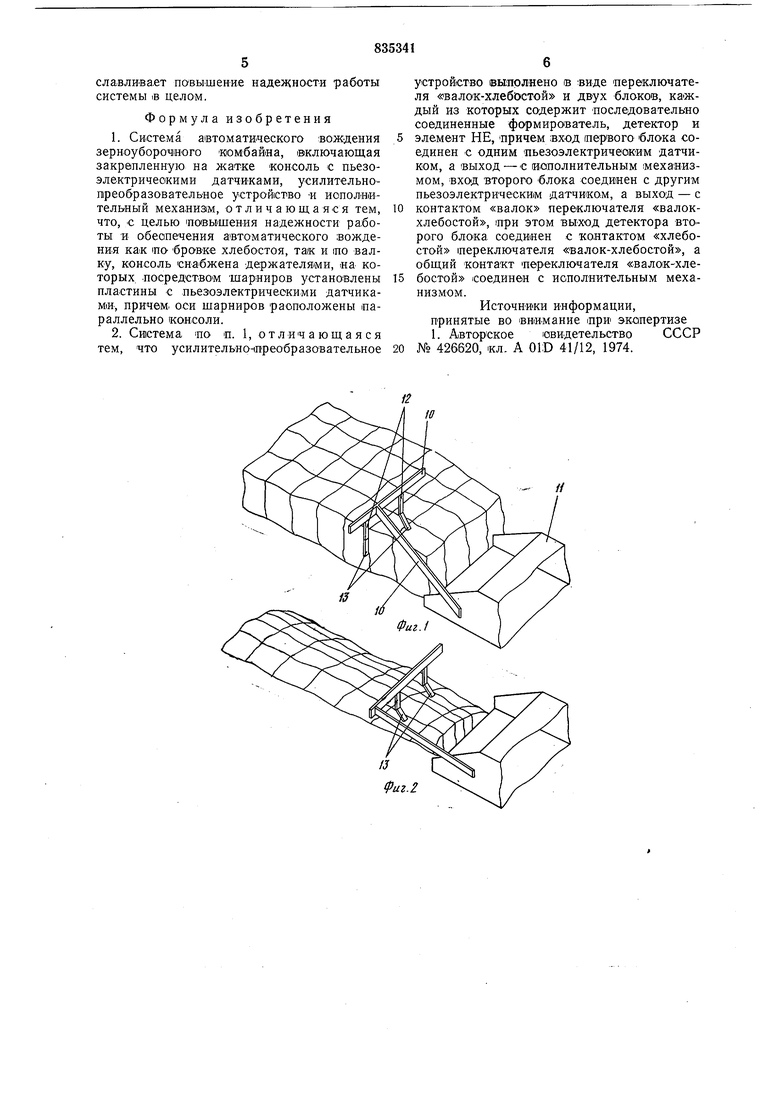
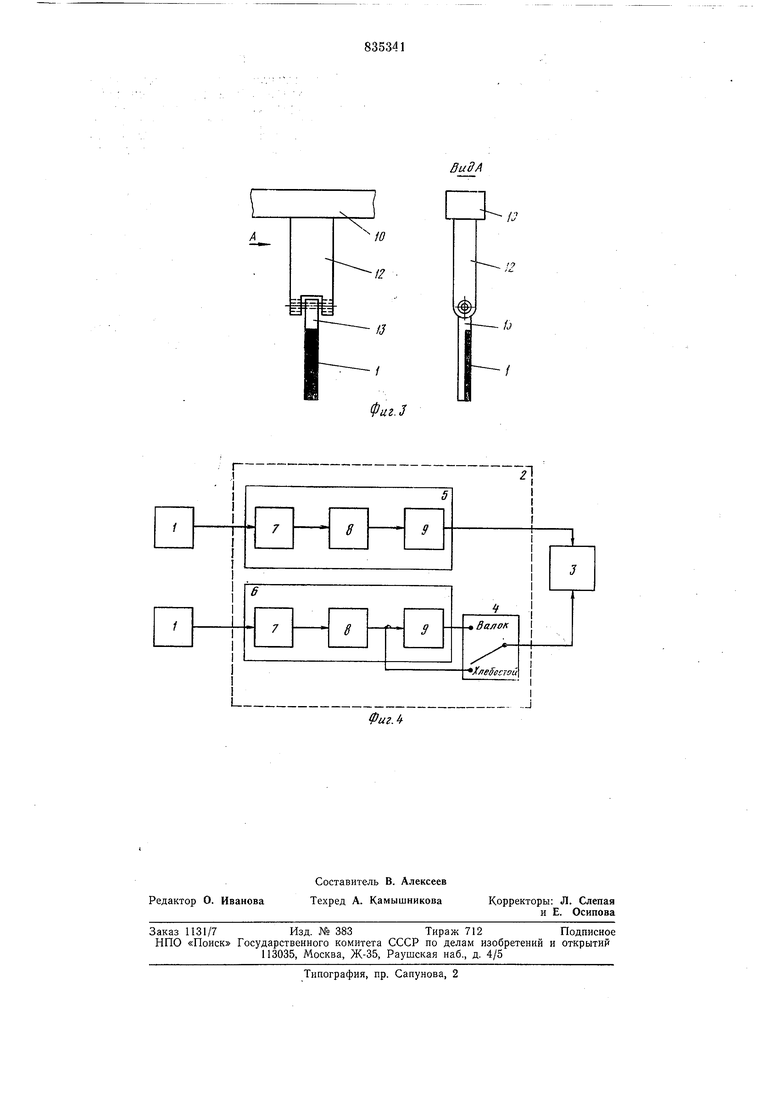
На фиг. 1 показано -положение коисоли с пьезоэлектрическими датчиками при аВтоматическом вождении шо бровке хлебостоя; на фиг. 2-ПО валку; На фиг. 3 Показана конструкция пьезоэлектрического датчика, и его крепление к консоли; иа фиг. 4 - блоксхема системы автоматического волсдеиия.
Система автоматического вождения зерноуборочного комбайиа содержит пьезоэлектрические датчики 1, усилительно-преобразовательное устройство 2 и дополнительный механизм 3. Усилительно-преобразовательное устройство 2 содерЖИТ двухпозициоиный иереключатель «валок-хлебостой 4 и два блока - 5 и 6. Блоки 5 И 6 содержат последовательно соединенные формирователь 7, детектор 8, элемент НЕ 9. Консоль 10 установлена впереди 11 комбайна, параллельно жатке 11 и нерпендикулярно направлению движения КОМбайна. На нижией плоОКОСти консоли 10 жестко закреплены держатели 12, шарнирно овязаННые с пластинами 13 с возможностью Вращения последних вокруг оси, параллельной консоли 10. На пластииах 13 установлены пьезоэлектрические датчики 1 блоков 5 И 6. Выход блока 5 подключен к иополнительнОМу механизму 3. Выход блока 6 подключен к контакту «валок переключателя «валок-хлебостой 4. Выход детектора 8 блока 6 подключен к контакту «хлебостой переключателя «валок-хлебостой, общий конец которого подключен к исполнительному механизму 3.
Принцип действия системы автоматического Вождения заключается в следующем. При прямом способе уборки консоль 10 крепится таким образом, чтобы при требуемом направлении движения комбайна бровка хлебостоя находилась между держателями 12. При этом колосья воздействуют неправый пьезоэлектрический датчик 1 (фиг. 1). При движении комбайна пластина 13 отклоняется В зависимости от высоты хлебостоя и как бы ваплывает на поверХность хлебостоя.
Сигналы с правого пьезоэлектрического датчика 1 поступают через форМИрователь 7 блока 5, где они усиливаются и преобразуются Б им1пульсы С 1ПОСтоянной длительностью и амплитудой, на вход детектора 8 блока 5. С выхода детектора 8 блока 5 медленно меняющееся, практически постоянное, напряжение поступает на элемент НЕ 9 блока 5, на выходе которого потенциал равен нулю. На вход формирователя 7 блока 6 усилительно-1прео.бразовательного устройства 2 импульсы с левого пьезоэлектрического датЧИка 1 не поступают (фиг. 1). Переключатель «валок-хлебостой 4 установлен в положение «хлебостой и на выходе общего конца переключатёля «валок-хлебостой 4 потенциал также равен нулю.
При отклонении комбайна влево от заданного направления пластина 13 сПравым пьезоэлектрическим датчиком 1 сходит с хлебастоя; и на вход формирователя 7 блока 5 сигнал не поступает. Потенциал на входе элемента НЕ 9 блока 5 становится paiBeH Нулю,, а на выходе - единице. ВКлючается исполнительный механиэм 3, с помощью которого корректируется нацравление движения кОМбайна.
При отклонении комбайна вправо от заданного направления пластина 13. с левым пьезоэлектрическим датчиком 1 входит в хлеоостой, н.а входе формирователя 7 блока 6 ПОЯ1ВЛЯЮТСЯ импульсы, а на выходе детектора 8 блока 6 -постоянный сигнал, кото-рЫй поступает через контакты переключателя «валок-хлебостой 4 на вход исполнительного механизма 3. Происходит коррекция направления Д1вижения КОМбайна.
При подборКе валка (фиг. 2) переключатель «валок-хлебостой 4 устанавливается в положение «валок, тем самым во ;второй контур управления подключается элемент Ht У блОКа Ь. ienepb оба контура работают одинаково. Консоль 10 устанавливается такИМ ооразом, что при требуемом направлении движения комюайна обе пластины 13 идут по валку. Сигналы с обоих пьезоэлектрических датчиков 1 поступают через формирОвателй 7 блоков 5 и 6 детекторы 8 блоков 5 и 6 на Вход элементов НЕ 9 олоков 5 И 6. На выходе этих элементов потенциал равен нулю.
При отклонении комбайна от заданного направления одна из пластин 13 сходит с валка, им1пульсы с выхода соответствующего пьезоэлектрического -датчика 1 не поступают, на выходе одного из элементов НЕ 9 потенциал становится; равен единице. Включается исполнительный механизм 3, и ОСуществляется коррекция направления движения комбайна.
Конструкция предлагаемого ивмерйтельного преобразователя., а именно шарнирное соединение пластйн, исключает случай «аматывапйя на ч-увствйтельный элемент стеблей растенИЙ и механического разрущающего воздействИЯ по сторонних предметов, встречающихся на иути комбайна. Это обуславлИВает повышение надежности работы
системы iB целом.
Формула изобретения
1.Система а1втоматИЧеского вождения зерноуборочиого «омбайна, включающая закрепленную на жатке консоль с пьезоэлектрическими датчиками, усилительнопреобразовательное устройство И ИОПОЛ.НИтельный механизм, отличающаяся тем, что, с целью повышения надежности работы и обеспечения автоматического вождения KaiK 1ПО бровке хлебостоя, та/к и то валку, консоль снабжена держателями, «а которых .посредством шарниров установлены пластины с пьезоэлектрическими датчиками, причем оси шарниров расположены параллельно консоли.
2.Си1стема ио п. 1, о т л и ч а ю щ а я с я тем, что усилительно-1преобразовательное
устройство выполнено ев виде переключателя «валок-хлебостой и двух блоков, каждый из которых содержит последовательно соединенные формирователь, детектор и
элемент НЕ, причем вход первого блока соединен с одним пьезоэлектрическим датчиком, а выход-- с исполнительным механизмом, вход второго блока соединен с другим пьезоэлектрическим датчиком, а выход - с
контактом «валок переключателя «валокхлебостой, при этом выход детектора второго блока соединен с контактом «хлебостой переключателя «валок-хлебостой, а общий контакт переключателя «валок-хлебостой соединен с исполнительным механизмом.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
№ 426620, кл. А 01;D 41/12, 1974.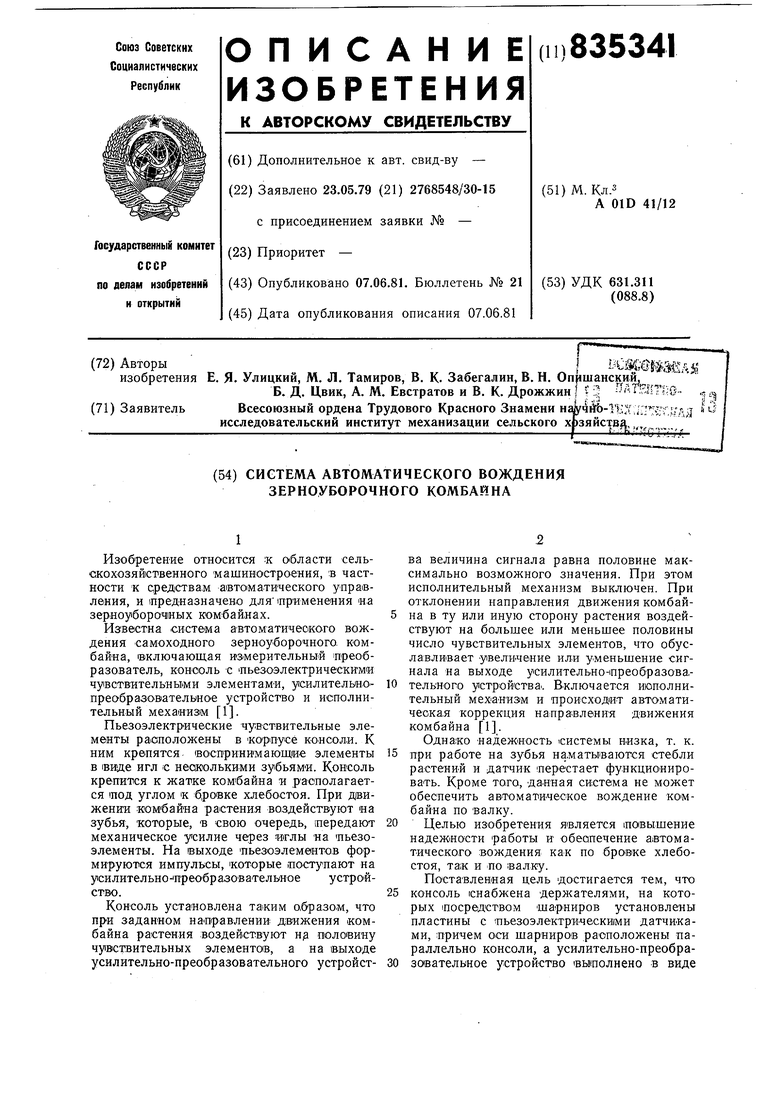
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распознавания валка растенийили ХлЕбОСТОя HA фОНЕ СТЕРНи | 1979 |
|
SU818517A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САЛ1ОХОДНОГО ЗЕРНОВОГО КОМБАЙНА | 1971 |
|
SU296495A1 |
| Устройство для автоматического вождения самоходного комбайна вдоль подбираемого валка | 1981 |
|
SU988213A1 |
| Способ распознавания валка растений или хлебостоя на фоне стерни | 1985 |
|
SU1314970A1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| ВАЛКОВАЯ ЖАТКА | 2002 |
|
RU2242858C2 |
| ДАТЧИК ПОЛОЖЕНИЯ БРОВКИ ХЛЕБА ДЛЯ САМОХОДНОГО ЗЕРНОУБОРОЧНОГО КОЛ1БАЙНА | 1971 |
|
SU426620A1 |
| ПРИЦЕПНОЙ ЖАТВЕННЫЙ АГРЕГАТ | 2012 |
|
RU2521710C1 |
| ПРИЦЕПНОЙ ЖАТВЕННЫЙ АГРЕГАТ | 2011 |
|
RU2476057C1 |
| Валковая жатка | 1978 |
|
SU753383A1 |
10
//
фиг. 2
Ю -f2
