4-Ьо6ретение относится к ytipaisJieHHro движением группы транспортных средств, в частности к системам вождения сельскохозяйственных самоходных агрегатов.
По основному авт. св. № 880284 известна система группового управления самоходными агрегатами, содержащая датчик угла поворота ведущего агрегата, связанный через канал дистанционной передачи сигналов с блоком управления исполнительными органами ведомого агрегата, включающим в себя датчик пройденного пути и программный регистр, устройство ориентации с излучателем на ведущем агрегате и приемными элементами на ведомом, подключенным к усилителям с автоматической регулировкой усиления и с управляемыми делителями напряжения, к одним из входов которых подключен генератор опорного напряжения и элемент сравнения, при этом блок управления исполнительными органами ведомого агрегата снабжен включенными между датчиком пройденного пути и программным регистром управляемым ключевым элементом, триггером и подключенным к его выходу одним своим входом элементом И, подключенным к его другому входу элементом ИЛИ, связанным своими входами с выходом исполнительного органа ведомо10 агрегата и с датчиком угла поворота ведущего агрегата соответственно, сумматором, подключенным к одному его входу дополнительным элементом сравнения и источником эталонного сигнала, соединенным с одним входом дополнительного элемента сравнения, другой вход которого соединен с датчиком угла поворота ведущего агрегата через канал дистанционной передачи сигналов, причем другой вход сумматора подключен к одному из выходов программного регистра, соединенного своим другим входом с управляющим входом триггера, а выход сумматора соединен с управляющим входом одного из управляемых делителей, подключенного к одному из входов элемента сравнения устройства ориентации I.
Недостатком данной системы является |-;изкая точность вождения ведомого агрегата на участках выхода на поворотную полосу и входа в рабочий гон, обусловленная тем, что на данных участках траектории движения изменения интервального расстояния приводит к изменению эквидистантного р; сстояния.
Цель изобретения - повыщение точности вождения на участках выхода на поворотную полосу и входа в рабочий гон.
Указанная цель достигается тем, что система дополнительно снабжена преобразовате.тьно-усилительным элементом механизма управления скоростным режимом ведомого агрегата, ключевым элементом, фазовым детектором и элементом сравнения, при этом один из входов последнего соединен с выходом одного из управляе.мых делителей, другой - с генератором опорного напряжения, а выход через фазовый детектор связан с одним из входов ключевого элемента, с другим входом которого соединен выход элемента И блока управления и с входом преобразовательно-усилительного элемента механизма управления скоростным режимом ведомого агрегата, причем выход ключевого элемента соединен с входом сум0 матора, а второй вход фазового детектора связан с генератором опорного напряжения.
На чертеже представлена функциональная схема системы.
Система содержит датчик 1 угла поворота ведущего агрегата и преобразовательно-усилительный элемент 2 управления рабочим орудием ведущего агрегата, связанные через канал дистанционной передачи сигналов, включающий в себя передатчик 3 Q и приемник 4 сигналов управления, с блоком 5 управления исполнительными органами 6 ведомого агрегата.
В систему входит также устройство ориентации, содержащее излучатель 7, установленный На ведущем агрегате, приемники 8 и 9, установленные на ведомом агрегате, подключенные на их выходах усилители 10 и 11 с автоматической регулировкой усиления (АРУ), а также управляе.мые делители 12-16, к одним из входов которых подключен генератор 17 опорного напряжения.
К выходам делителей 13 и 15 подключен блок 18 вычитания и последовательно включенные с ним элемент 19 сравнения, фазовый детектор 20 и преобразовательно-усилительный элемент 21 органов поворота ведомого агрегата. Усилители 10 и И состоят из последовательно включенных управляемых делителей 22-24 и 25-27, усилителей 28 и 29 прямого тракта и усилителей 30 и 31 обратного тракта.
Блок 5 содержит программный регистр 32, к входу которого подключен управляемый ключевой элемент 33, соединенный своими входами с датчиком 34 пройденного пути и элементом И 35, входы которого соединены с выходами элемента ИЛИ 36 и триггера 37. Входы элемента ИЛИ 36 подключены к входу приемника 4 и выходу исполнительного органа 6 ведомого агрегата. Один из выходов регистра 32 подключен к одному из входов триггера 37, другой вход которого соединен через канал дистанционной передачи сигналов с датчиком 1.
Система содержит также устройство автоматической коррекции сигнала программного регистра по углу поворота ведущего агрегата и по интервальному расстоянию между агрегатами и стабилизации интер5 вального расстояния. В состав устройства автоматической коррекции входят сумматор 38, первый вход которого соединен с выходом регистра 32, второй вход - с выходом элемента 39 сравнения, входы которого соединены с входом блока 5 и источника 40 эталонного сигнала, а третий вход через ключевой элемент 41, фазовый детектор 42 связан с выходом дополнительного элемента 43 сравнения, подключенного одним из своих входов к выходу управляемого делителя 12, причем вторые входы фазового детектора 42 и элемента сравнения 43 соединены с генератором опорного напряжения 17, а второй вход ключевого элемента 41 - с выходом элемента И 35. Выход сумматора 38 соединен с управляющим входом делителя 16, подключенного своим выходом к одному из входов элемента 19 сравнения устройства ориентации. Выход фазового детектора 42 соединен также с входом преобразовательно-усилительного элемента 44 механизма управления скоростным режимом ведомого агрегата. К одному из выходов приемника 4 подключен преобразовательноусилительный элемент 45 управления муфтой сцеплейия ведомого агрегата, а к одному из входов передатчика - элемент 46 управления муфтой сцепления ведущего агрегата.
Система работает следующим образом.
Сигнал излучателя 7, воспринимаемый приемниками 8 и 9 поступает на вход соответствующих усилителей 10 и 11. Коэффициенты передачи каждого из управляемых делителей пропорциональны расстояниям от излучателя 7 до соответствующего приемника 8 или 9. Так как коэффициенты передачи управляемых делителей 12-15, включенных последовательно к входу генератора опорного напряжения 17, равны коэффициентам передачи управляемых делителей 22-27, то сигналы на выходах управляемых делителей 13 и 15 будут пропорциональны квадратам расстояний от излучателя 7 до приемников 8 и 9. Сигналы с выходов управляемых делителей 13 и 15 подаются на блок 18, выходной сигнал которого поступает на вход элемента 19. На второй его вход через управляемый делитель 16 поступает эталонный сигнал с одного из выходов генератора 17, соответствующий заданному эквидистантному расстоянию между агрегатами На поле.
С выхода элемента 19 сигнал подается на один из входов фазового детектора 20, на второй вход которого поступает коммутирующий сигнал с другого выхода генератора 17. Следовательно, сигнал на выходе фазового детектора 20 будет соответствовать смещению ведомого агрегата относительно ведущего в направлении перпендикулярном их траектории движения. При движении ведомого агрегата относительно ведущего на данном эквидистантном расстоянии сигнал на выходе блока 18 не изменится, а следовательно, сигнал на выходе фазового детектора 20 будет равен нулю. При смещении
ведомого агрегата от заданной траектории движения изменятся коэффициенты передачи управляемых делителей 12-15, что приведет к изменению сигнала на выходе бло5 КЗ 18 и, следовательно, на выходе фазового детектора. Величина и знак этого сигнала будут соответствовать величине и направлению смещения ведомого агрегата относительно заданной траектории движения. Этот сигнал поступает на преобразовательно-уси0 лительный элемент 21 органов поворота ведомого агрегата, который вернет последний на заданную траекторию движения.
При подходе ведущего агрегата с гона к границе поворотной полосы водитель пере водит рабочее орудие в транспортное положение и начинает осуществлять поворот ведущего агрегата. При этом сигнал с элемента 2 через канал дистанционного управления и элемент ИЛИ 36 поступает на один из
Q входов элемента 35 И. Сигнал датчика 1 также через канал дистанционного управления поступает на один из входов триггера 37. Триггер 37 срабатывает и подает сигнал на второй вход элемента И 35. Таким образом, наличие сигналов на обоих входах элемен5 та И 35 говорит о том, что рабочее орудие ведущего агрегата находится в транспортном положении, и ведущий агрегат начинает осуществлять поворот. В результате этого на выходе элемента И 35 появляется сигнал, который открывает элемент 33 для про пускания импульсов датчика 34 пройденного пути на программный регистр 32. Регистр 32 по заданной программе с помощью управляемого делителя 16 изменяет эталонный сигнал элемента 19 таким образом, что ведомый агрегат до границы гон-поворотная полоса движется параллельно траектории движения ведущего агрегата. Причем при проходе этой границы ведомым агрегатом по команде программного регистра, время выдачи которой определяется коли0 чеством импульсов датчика 34 - интервальным расстоянием между агрегатами, производится перевод рабочего орудия ведомого агрегата в транспортное положение с помощью преобразовательно-усилительного элемента 6. После прохождения ведомым
5 агрегатом поворотной полосы oft также по заданной программе начинает выстраиваться в колонну с ведущим агрегатом. После окончания поворота и выстраивания агрегатов в колонну, т.е. после окончания программы, выходным сигналом программного регистра 32 производится переключение триггера 37. В результате этого выходной сигнал триггера 37, поступающий на элемент И 35, исчезнет, и элемент 33 прекратит подачу импульсов датчика 34 пройденного пути
5 на программный регистр 32. Таким образом, на поворотной полосе агрегаты будут двигаться в колонне. При подходе ведущего агрегата ко второму повороту, т.е. к выходу на гон, водитель начинает поворачивать :ирггат. При этом сигнал датчика 1 угла пе.;орота ведущего агрегата по каналу дистанционного управления поступает на триггер 37, который срабатывает, и через элемент И 35 прохождения импульсов датчика 34 пройденного пути - на программный регистр 32. Регистр 32 посредством излучения эталонного сигнала элемента 19 с помощью управляемого делителя 16 осуществляет изменение эквидистантного расстояНия ведомого агрегата таким образом, что последний выходит на границу поворотная полоса-гон со смещением, равным ширине захвата рабочего орудия. При прохождении ведущим агрегатом границы гон-поворотная полоса водитель переводит агрегатируемое орудие в рабочее положение. В этот момент сигнал, несущий информацию о положении агрегатируемого орудия ведущего агрегата, на одном из входов элемента ИЛИ 36 исчезает. Для того, чтобы в этот г.гамент программа движения ведомого агреraia не прерывалась, на втором входе элемента ИЛИ 36 присутствует выходной сигнал преобразовательно-усилительного элемента 6. При выходе ведомого агрегата на границу гон-поворотная полоса по заданной программе сигналом регистра 32 с помощью элемента 6 происходит перевод агрегатируемого орудия ведомого агрегата врабочее положение. В этот же момент выходной сигнал, поступающий на один из входов элемента ИЛИ 36, исчезает. Одновременно заканчивается отработка программы выхода ведомого агрегата с поворотной полосы на гон, и одним из выходных сигналов программного регистра 32 триггер 37 перебрасывается в такое положение, при котором его выходной сигнал исчезает. Следовательно, на входах элемента И 35 сигналы будут отсутствовать. В результате этого элемент 33 закрывается и поступление импульсов датчика 34 пройденного пути на вход программного регистра 32 прекращается. Таким образом, при движении агрегатов на гоне программный регистр 32 не работает.
Для точной отработки программы движения ведомого агрегата на поворотной полосе водителю ведущего агрегата необходимо выдерживать заранее заданный радиус поворота ведущего агрегата, что не всегда удается. С целью устранения влияния неточности поддержания водителем заданного радиуса поворота ведущего агрегата на качество вождения ведомого агрегата в схеме предусмотрена коррекция выходного сигнала программного регистра 32, поступающего на управляемый делитель 16, с помощью сигнала, несущего информацию об угле поворота ведущего агрегата. Этот сигнал при достижении определенной величины с датчика угла поворота ведущего агрегата по
каналу дистанционного управления поступает на один из входов элемента 39, на второй вход которого поступает эталонный сигнал источника 40, величина которого эквивалентна заданному радиусу поворота ведущего агрегата. Таким образом, на выходе элемента 39 формируется сигнал ошибки, величина и фаза которого несут информацию о величине и направлении отклонения ведущего агрегата от заданного радиуса поворота. Этот сигнал ощибки поступает на сумматор 38, где, суммируясь с основным сигналом программного регистра, производит коррекцию эталонного сигнала генератора 17 таким образом, чтобы при отклонении ведущего агрегата от заданного радиуса поворота ведомый агрегат не изменял своего радиуса поворота.
При движении на участках выхода на поворотную полосу и входа в рабочий гон нарушается взаимный скоростной режим движения агрегатов за счет того, что агрегаты проходят различные расстояния, определяемые программными траекториями их движения, а также из-за возможных различных положений рабочих орудий ведущего и ведомого агрегатов. Это вызывает изменение интервального расстояния, что в свою очередь приводит к измененю эквидистантного расстояния и обусловливает низкую точность вождения На данных участках.
Влияние изменений интервального расстояния между агрегатами на эквидистантное устраняется тем, что выходной сигнал программного регистра 32 корректируется сигналом. Несущим информацию об изменении интервального расстояния между агрегатами.
Сигнал, пропорциональный интервальному расстоянию, с выхода управляемого делителя 12 поступает на первый вход элемента 43 сравнения, на второй вход которого поступает эталонный сигнал с выхода генератора опорного Напряжения 17, величина которого пропорциональна заданному интервальному расстоянию между агрегатами. С выхода элемента 43 сравнения сигнал поступает на один из входов фазового детектора 42, на второй вход которого поступает коммутирующий (опорный) сигнал с выхода генератора 17. На выходе фазового детектора 42 формируется сигнал ощибки, величина и знак которого несут информацию о величине и направлении отклонения агрегатов от заданного интервального расстояния между ними. Этот сигнал через ключевой элемент 41 поступает на сумматор 38, где суммируется с основным сигналом программного регистра, в результате чего изменение интервального расстояния в определенных пределах на вызывает изменения эквидистантного расстояния. Ключевой элемент 41 управляется выходным сигналом элемента И 35, что обеспечивает синхронную работу устройства коррекции с программным регистром, т.е. отключение устройства коррекции при движении на рабочем гойе.
Кроме того, в системе предусмотрена стабилизация заданного интервального расстояния, которая осуществляется за счет управления скоростным режимом ведомого агрегата. Для этого с выхода фазового детектора 42 подается сигнал на преобразовательно-усилительный элемент 44 механизма управления скоростным режимом ведомого агрегата. В системе предусмотрена синхронная с ведущим агрегатом остановка ведомого агрегата с помощью сигнала элемента 46 управления муфтой сцепления ведущего агрегата, который через канал дистанционного управления воздействует на преобразовательно-усилительный элемент 45 муфты сцепления ведомого агрегата.
Использование изобретения позволяет повысить точность вождения ведомого агрегата на участках выхода на поворотную полосу и входа в рабочий гон при сохранении ширины поворотной полосы, рекомендуемой агротехническими требованиями.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
| Устройство ориентации для систем группового автоматического вождения машинно-тракторных агрегатов | 1979 |
|
SU1376963A1 |
| Устройство для автоматического направления движения самоходных агрегатов | 1977 |
|
SU615880A1 |
| Способ дублерного вождения машинно-тракторных агрегатов | 1985 |
|
SU1382417A1 |
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОГО АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРНЫХ АГРЕГАТОВ | 1966 |
|
SU179526A1 |
| Чувствительный элемент системы автоматического управления вождением мобильного агрегата | 1977 |
|
SU791282A1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
| Способ управления агророботом | 1987 |
|
SU1556557A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
СИСТЕМА ГРУППОВОГО УПРАВЛЕНИЯ САМОХОДНЫМИ АГРЕГАТАМИ по авт. св. № 880284, отличающаяся тем, что, с целью повышения точности вождения на участках выхода на поворотную полосу и входа в рабочий гон, система дополнительно снабжена преобразовательноусилительным элементом механизма управления скоростным режимом ведомого агрегата, ключевым элементом, фазовым детектором и элементом сравнения, при этом один из входов последнего соединен с выходом одного из управляемых делителей, другой - с генератором опорного напряжения, а выход через фазовый детектор связан с одним из входов ключевого элемента, с другим входом которого соединен выход элемента И блока управления, и с входом преобразовательно-усилительного элемента механизма управления скоростным режимом ведомого агрегата, причем выход ключевого элемента соединен с входом сумматора, а второй вход фазового детектора связан с генератором опорного напряжения. (Л Vtv JV HTl-j гЛ- 2J g I Т Т VJ 05 О5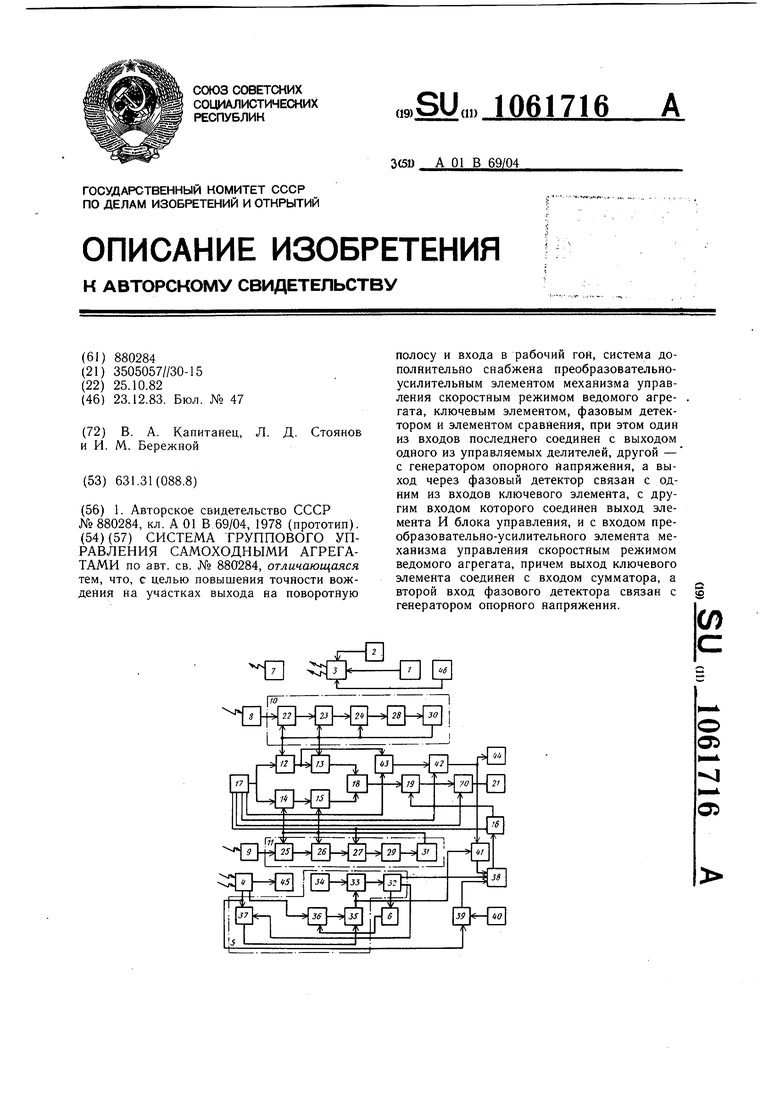
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
