(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ САМОХОДНОГО КОМБАЙНА ВДОЛЬ ПОДБИРАЕМОГО ВАЛКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения самоходных машин вдоль заданной траектории | 1979 |
|
SU886773A1 |
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1586548A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Автоматическое самонастраивающееся устройство для поддержания оптимальной нагрузки картофелеуборочного комбайна | 1977 |
|
SU919626A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Система автоматического вождения сельскохозяйственной машины по борозде | 1985 |
|
SU1387888A1 |
| Устройство для контроля и регулировки положения очесывающего барабана льноуборочного комбайна | 1990 |
|
SU1821066A1 |
| Устройство для автоматического управления загрузкой самоходной уборочной машины | 1989 |
|
SU1743450A1 |
| Устройство для автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1440377A1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
,1
Изобретение относится к сельскохозяйственному машиностроению, в частности к системам автоматического-вождения самоходных уборочных агрегатов.
Известен датчик для системы автоматического регулирования загрузки и вождения по валку самоходного комбайна, содержащий брус с грабельной решеткой,расположённый над обтекателем подборщика, .шарнирную рамку, взаимодействующую с брусом посредством пружин, и электрические преобразователи механического сигнала о повороте щупа ,1.
Недостаток автоматической системы с таким датчиком заключается в том, что она не обеспечивает необходимую точность вождения и поддержания оптимальной загрузки, так как жесткий брус с грабельной рещеткой находится в контакте с валком не более чем в двух точках. Кроме того, сечение валка имеет .сложную форму, и угол поворота грабельной решетки не определяет однозначно Ни положение подбираемого валка относительно оси комбайна, ни его объем, возможны также лойные сигналы на поворот, комбайна.
Известно устройство для автоматического вождения колесной машины по валку, содержащее балансирный датчик в виде многополозкового щупа,. располо йенного над обтекателем подборшика, электрический контактный преобразователь, электромагнитный гидрораспределитель и механизм передачи сигнала о положении управляемых колес 2.
Недостатки такого устройства заключаются в том, что. с его помощью трудно получить однозначную информацию о положении валка сложной и несимметричной формы, смещение валка относительно оси комбайна и поворота жесткого балансирного датчика находятся в Нелинейной зависимости, а используемый электрический преобра,5 зователь контактного типа позволяет получать только релейную характеристику, при этом выходной сигнал датчика зависит от ширины валка. В связи с этим это движение комбайна относительно подбираемого валка неустойчивое.
Цель изобретения - повышение точности работы устройства.
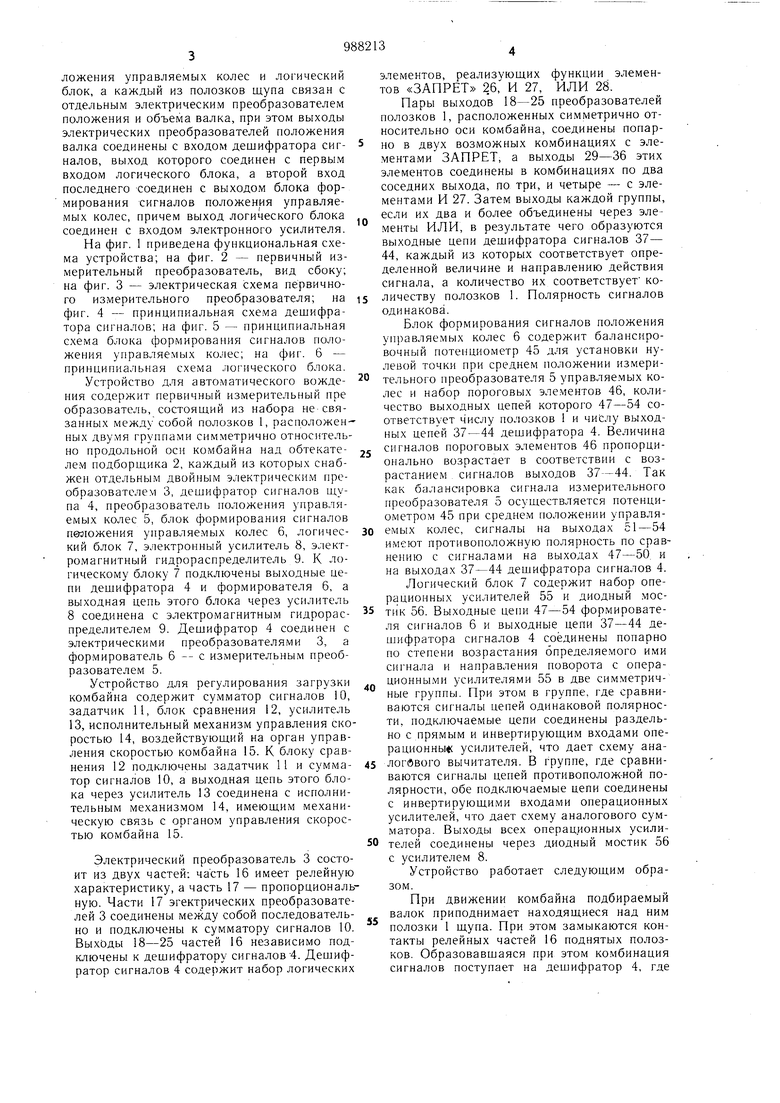
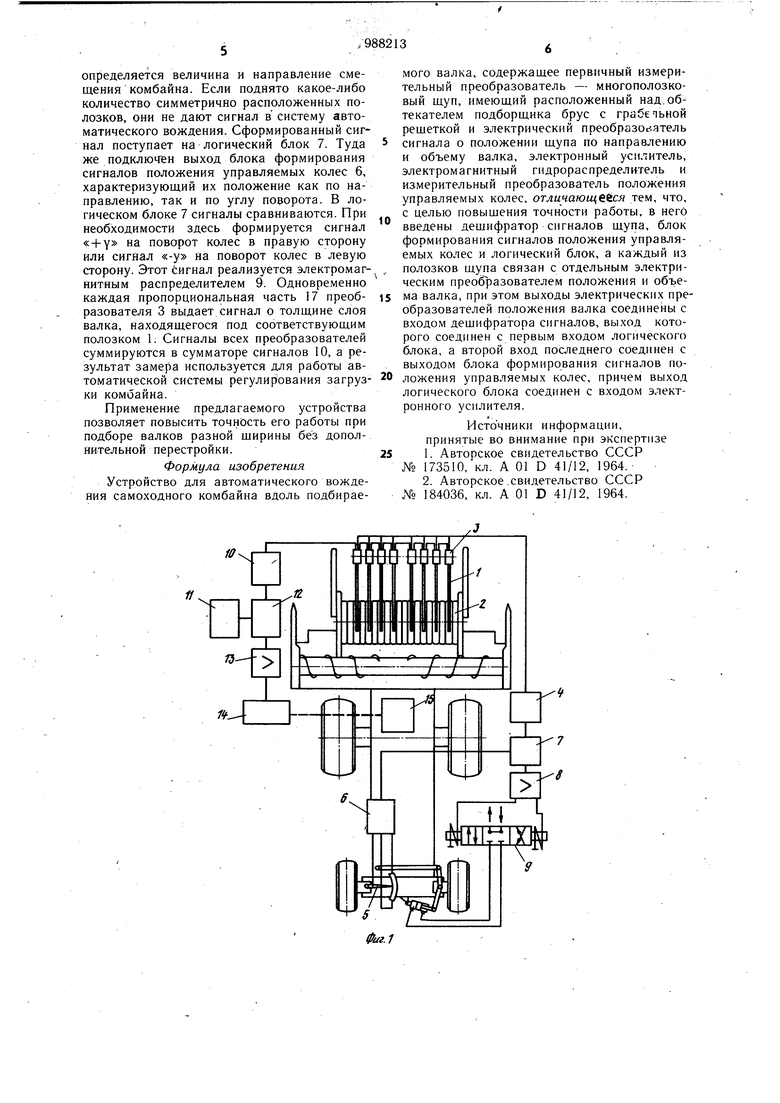
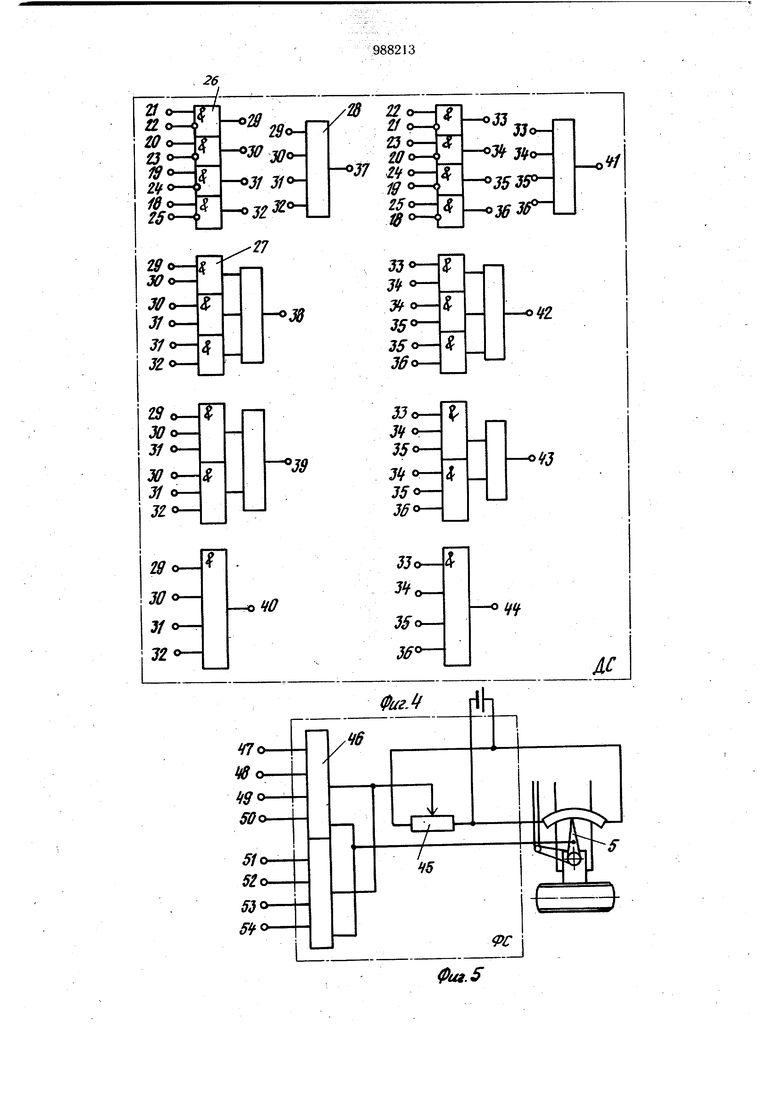
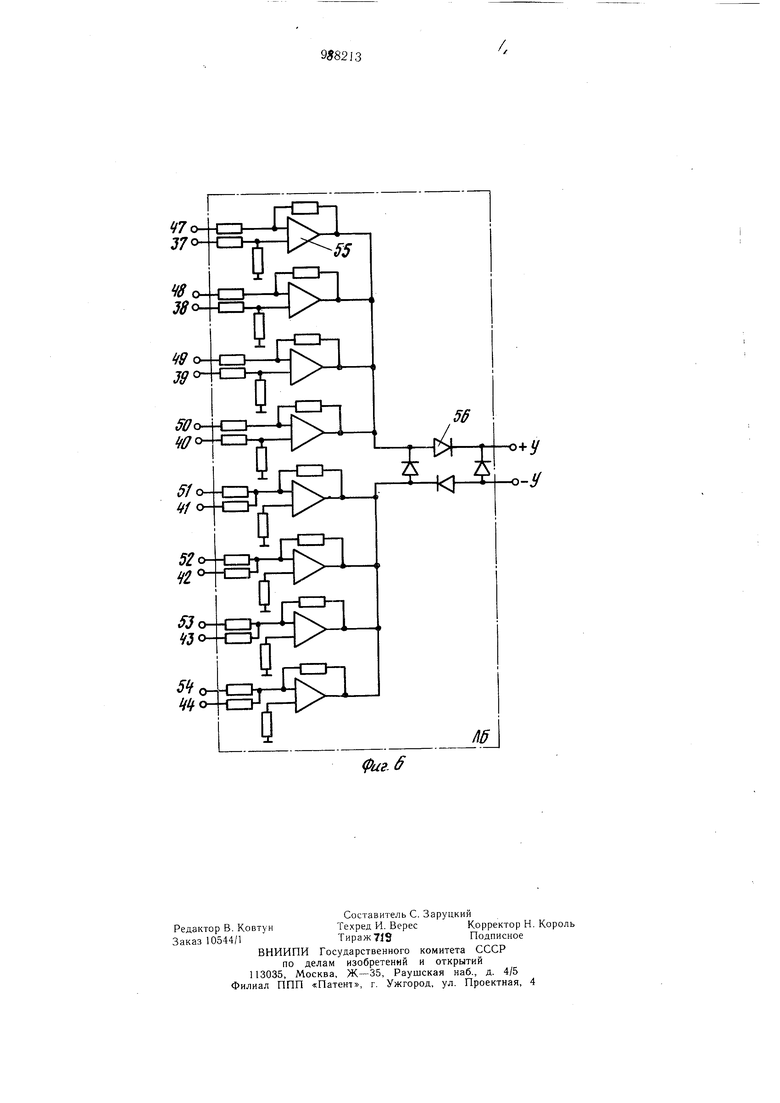
Поставленная цель достигается/за счет того, что в него введены дешифратор сигналов шупа, блок формирования сигналов положения управляемых колес и логический блок, а каждый из полозков щупа связан с отдельным электрическим преобразователем положения и объема валка, при этом выходы электрических преобразователей положения валка соединены с входом дешифратора сигналов, выход которого соединен с первым входом логического блока, а второй вход последнего соединен с выходом блока формирования сигналов положения управляемых колес, причем выход логического блока соединен с входом электронного усилителя. На фиг. 1 приведена функциональная схема устройства; на фиг. 2 - первичный измерительный преобразователь, вид сбоку; на фиг. 3 - электрическая схема первичного измерительного преобразователя; на фиг. 4 - принципиальная схема дешифратора си1налов; на фиг. 5 - принципиальная схема блока формирования сигналов положения управляемых колес; на фиг. 6 - принципиальная схема логического блока. Устройство для авто.матического вождения содержит первичный измерительный пре образователь, состоящий из набора не связанных между собой полозков 1, расположенных двумя группами симметрично относительно продольной оси комбайна над обтекателем подборщика 2, каждый из которых снабжен отдельным двойным электрическим преобразователем 3, дешифратор сигналов щупа 4, преобразователь положения управляемых колес 5, блок формирования сигналов пезюжения управляемых колес 6, логический блок 7, электронный усилитель 8, электромагнитный гидрораспределитель 9. К логическому блоку 7 подключены выходные цепи дешифратора 4 и формирователя 6, а выходная цепь этого блока через усилитель 8 соединена с электромагнитным гидрораспределителем 9. Дешифратор 4 соединен с электрическими преобразователя.ми 3, а формирователь 6 - с измерительным преобразователем 5. Устройство для регулирования загрузки комбайна содержит сумматор сигналов 10, задатчик 11, блок сравнения 12, усилитель 13, исполнительный механизм управления ско ростью 14, воздействующий на орган управления скоростью комбайна 15. К блоку сравнения 12 подключены задатчик 11 и сумматор сигналов 10, а выходная цепь этого блока через усилитель 13 соединена с исполнительным механизмом 14, имеющим механическую связь с органом управления скоростью комбайна 15. Электрический преобразователь 3 состоит из двух частей: часть 16 имеет релейную характеристику, а часть 17 - пропорциональную. Части 17 эгектрических преобразователей 3 соединены между собой последовательно и подключены к сумматору сигналов 10. 18-25 частей 16 независимо подключены к дешифратору сигналов 4. Дешифратор сигналов 4 содержит набор логических элементов, реализующих функции элементов «ЗАПРЕТ 2.6, И 27, ИЛИ 28. Пары выходов 18-25 преобразователей полозков 1, расположенных симметрично относительно оси комбайна, соединены попарно в двух возможных комбинациях с элементами ЗАПРЕТ, а выходы 29-36 этих элементов соединены в комбинациях по два соседних выхода, по три, и четыре - с элементами И 27. Затем выходы каждой группы, если их два и более объединены через элементы ИЛИ, в результате чего образуются выходные цепи дешифратора сигналов 37- 44, каждый из которых соответствует определенной величине и направлению действия сигнала, а количество их соответствует количеству полозков 1. Полярность сигналов одинакова. Блок формирования сигналов положения управляемых колес 6 содержит балансировочный потенциометр 45 для установки нулевой точки при среднем положении измерительного преобразователя 5 управляемых колес и набор пороговых элементов 46, количество выходных цепей которого 47-54 соответствует числу полозков 1 и числу выходных цепей 37-44 дешифратора 4. Величина сигналов пороговых элементов 46 пропорционально возрастает в соответствии с возрастанием сигналов выходов 37-44. Так как балансировка сигнала измерительного преобразователя 5 осуществляется потенциометром 45 при среднем положении управляемых колес, сигналы на выходах 51-54 и.меют противоположную полярность по сравнешпо с сигналами на выходах 47-50. и на выходах 37-44 дещифратора сигналов 4. Логический блок 7 содержит набор операционных усилителей 55 и диодный мостик 56. Выходные цепи 47-54 формирователя сигналов 6 и выходные цепи 37-44 дешифратора сигналов 4 соединены попарно по степени возрастания определяемого ими сигнала и направления поворота с операционными усилителями 55 в две симметричные группы. При этом в группе, где сравниваются сигналы цепей одинаковой полярности, подключаемые цепи соединены раздельно с прямым и инвертирующим входами операционньж усилителей, что дает схему аналогбвого вычитателя. В группе, где сравниваются сигналы цепей противополож-ной полярности, обе подключаемые цепи соединены с инвертирующими входами операционных усилителей, что дает схему аналогового сумматора. Выходы всех операционных усилителей соединены через диодный мостик 56 с усилителем 8. Устройство работает следующим образом. При движении комбайна подбираемый валок приподнимает находящиеся над ним полозки 1 щупа. При этом замыкаются контакты релейных частей 16 поднятых полозков. Образовавщаяся при этом комбинация сигналов поступает на дешифратор 4, где
определяется величина и направление смещения комбайна. Если поднято какое-либо количество симметрично расположенных полозков, они не дают сигнал в систему автоматического вождения. Сформированный сигнал поступает на логический блок 7. Туда же подключен выход блока формирования сигналов положения управляемых колес 6, характеризующий их положение как по направлению, так и по углу поворота. В логическом блоке 7 сигналы сравниваются. При необходимости здесь формируется сигнал « + Y на поворот колес в правую сторону или сигнал «-у на поворот колес в левую сторону. Этот сигнал реализуется электромагнитным распределителем 9. Одновременно каждая пропорциональная часть 17 преобразователя 3 выдает сигнал о толщине слоя валка, находящегося под соответствующим полозком 1: Сигналы всех преобразователей суммируются в сумматоре сигналов 10, а результат замера используется для работы автоматической системы регулирЪвания загрузки комбайна.
Применение предлагаемого устройства позволяет повысить точнЬсть его работы при подборе валков разной щирины без дополнительной перестройки.
Формула изобретения
Устройство для автоматического вождения самоходного комбайна вдоль подбираеfff
И.
мого валка, содержащее первичный измерительный преобразователь - многополозковый щуп, имеющий расположенный над. об текателем подборщика брус с грабепьной рещеткой и электрический преобразое-атель
сигнала о положении щупа по направлению и объему валка, электронный усилитель, электромагнитный гидрораспределитель и измерительный преобразователь положения управляемых колес, отличающаяся тем, что, с целью повышения точности работы, в него
введены дещифратор сигналов щупа, блок формирования сигналов положения управляемых колес и логический блок, а каждый из полозков щупа связан с отдельным электрическим преобразователем положения и объема валка, при этом выходы электрических преобразователей положения валка соединены с входом дещифратора сигналов, выход которого соединен с первым входом логического блока, а второй вход последнего соединен с выходом блока формирования сигналов положения управляемых колес, причем выход логического блока соединен с входом электронного усилителя.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 173510, кл. А 01 D 41/12, 1964.2. Авторское свидетельство СССР № 184036, кл. А 01 D 41/12, 1964.
Фиг. 5
