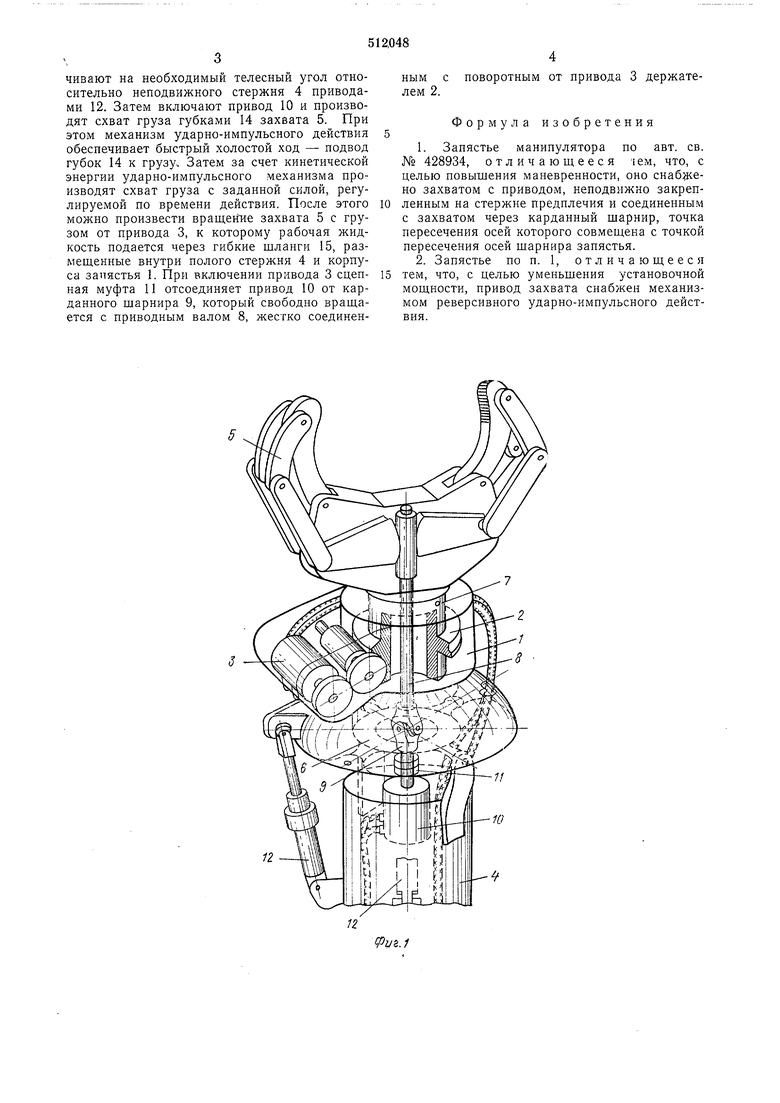
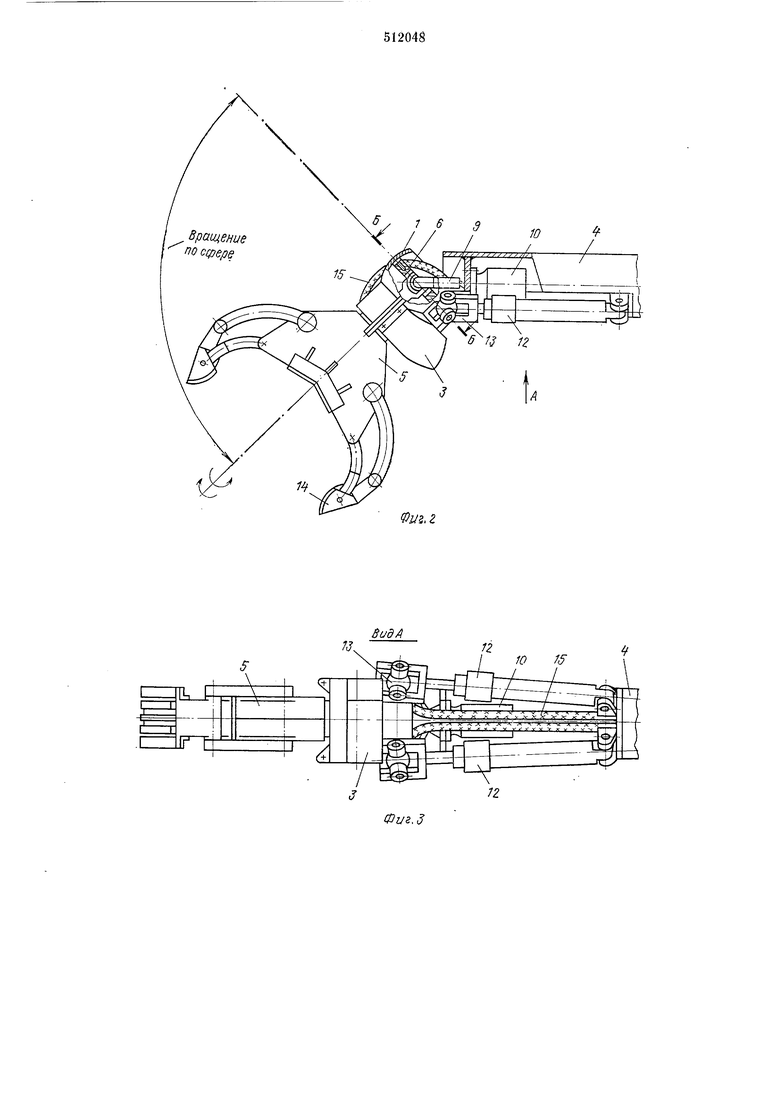
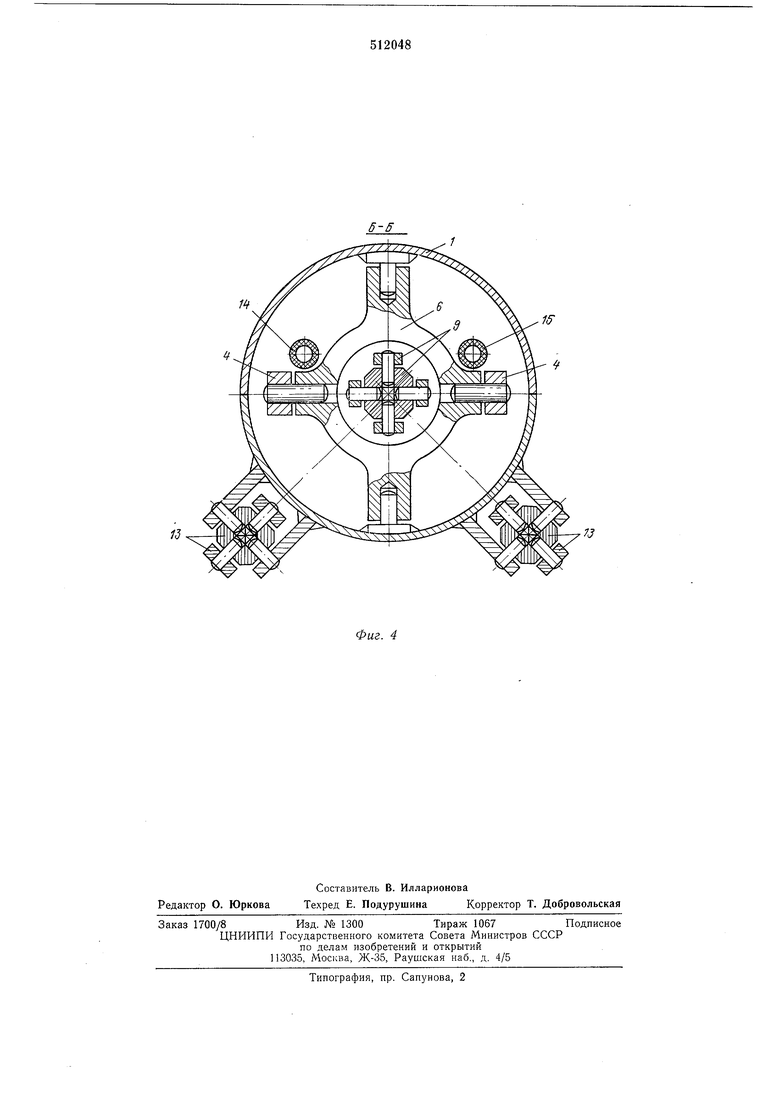
чивают на необходимый телесный угол относительно неподвижного стержня 4 приводами 12. Затем включают привод 10 и производят схват груза губками 14 захвата 5. При этом механизм ударно-импульсного действия обеспечивает быстрый холостой ход - подвод губок 14 к грузу.. Затем за счет кинетической энергии ударно-импульсного механизма производят схват груза с заданной силой, регулируемой по времени действия. После этого можно произвести BpauteHlie захвата 5 с грузом от привода 3, к которому рабочая жидкость подается через гибкие шланги 15, размещенные внутри полого стержня 4 и корпуса запястья 1. При включении привода 3 сцепная муфта 11 отсоединяет привод 10 от карданного шарнира 9, который свободно враш,ается с приводным валом 8, жестко соединенным с поворотным от привода 3 держателем 2.
Формула изобретения
1.Запястье манипулятора по авт. св. № 428934, отличаюш,ееся 1ем, что, с целью повышения маневренности, оно снабжено захватом с приводом, неподвижно закрепленным на стержне предплечия и соединенным с захватом через карданный шарнир, точка пересечения осей которого совмещена с точкой пересечения осей щарнира запястья.
2.Запястье по п. 1, отличающееся тем, что, с целью уменьшения установочной мощности, привод захвата снабжен механизмом реверсивного ударно-импульсного действия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Запястье манипулятора | 1980 |
|
SU931469A1 |
| Запястье манипулятора | 1985 |
|
SU1303405A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Запястье манипулятора | 1977 |
|
SU670431A2 |
| Задающий механизм манипулятора | 1972 |
|
SU547337A1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| Запястье манипулятора | 1978 |
|
SU835735A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ МОБИЛЬНОГО РОБОТА НА СКЛАДЕ | 2019 |
|
RU2748441C2 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
12 , Вращение сфере Фи,г
S
14
6-S
т
Фиг. 4
