Изобретение относится к электротехнике, а конкретно к средствам измерения физических величин, к датчикам положения, и может быть использовано для двухкоорди- натных измерений угловых перемещений в различных технических системах (системы ориентации в пространстве, графические манипуляторы ЭВМ, ручные органы управления двухкоординатными перемещениями и др.).
Цель изобретения - увеличение линейности характеристики преобразования датчика и обеспечение взаимной независимости его выходных сигналов по обеим угловым координатам.
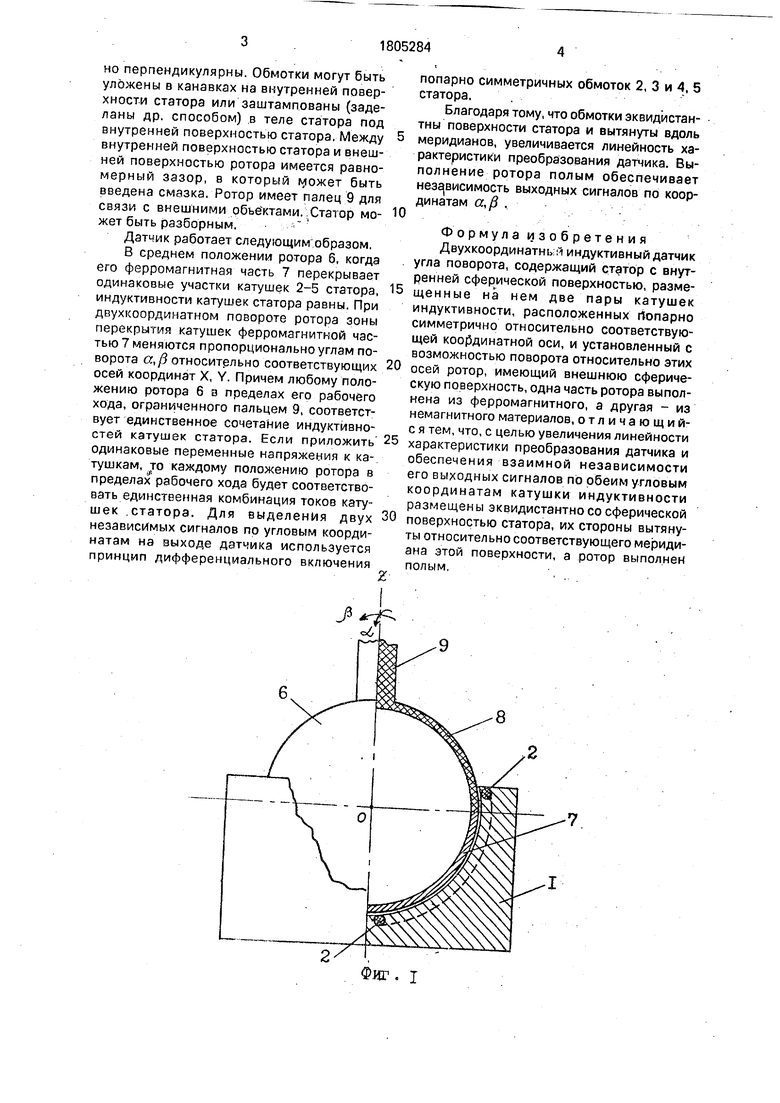
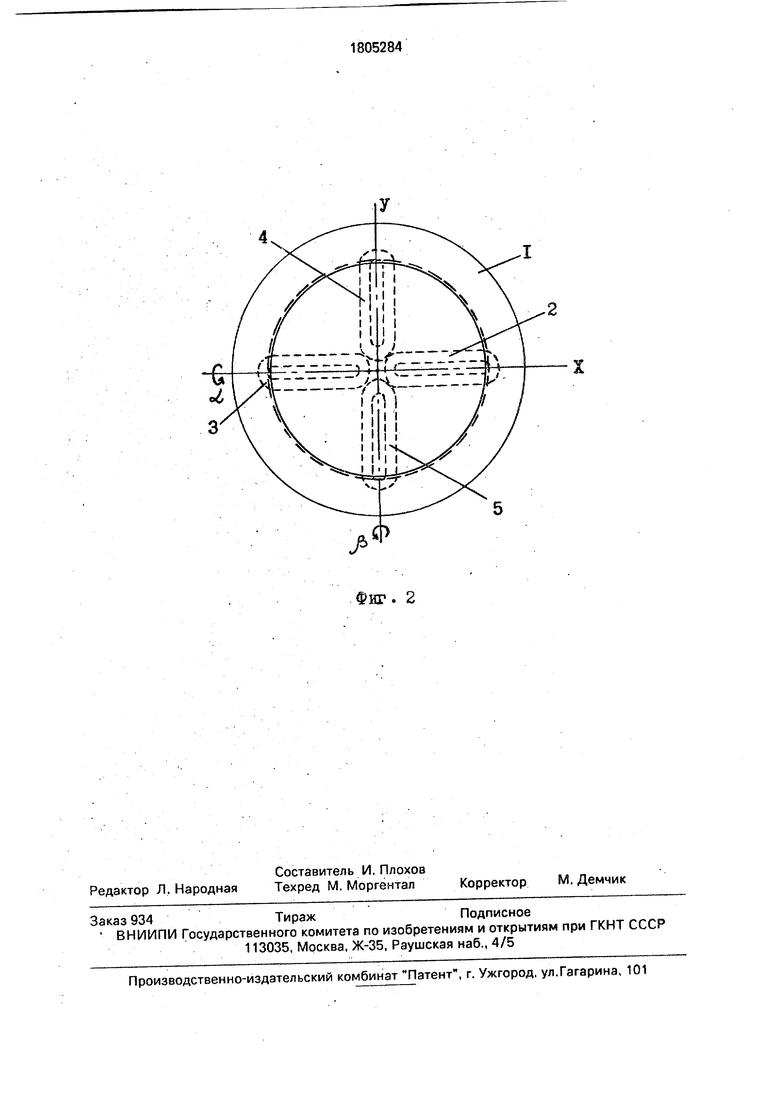
На фиг. 1 показана конструкция датчика; на фиг. 2 - статор датчика (вид сверху).
Двухкоординатный датчик угла поворота содержит статор 1 с внутренней сферической поверхностью, на котором размещены
две пары катушек индуктивности 2, 3 и 4, 5, расположенных попарно симметрично относительно соответствующей оси координат (ось симметрии внутренней поверхности статора Z). В статоре установлен с возможностью двухкоординатного поворота полый ротор 6, имеющий внешнюю сферическую поверхность. Часть 7 (например, половина) ротора выполнена из ферромагнитного, а часть 8 - из немагнитного материалов. Катушки индуктивности 2-5 размещены эквидистантно с внутренней сферической поверхностью статора, а их стороны вытянуты относительно (вдоль) соответствующего меридиана этой поверхности. В конкретной конструкции (фиг. 1 и 2) пары обмоток 2, 3 и 4,5 имеют каждая свою общую плоскость симметрии XOZ и YOZ, эти плоскоети пересекаются по оси симметрии внутренней поверхности статора Z и взаимО
ел ю
00
Ј
но перпендикулярны. Обмотки могут быть уложены в канавках на внутренней поверхности статора или заштампованы (заделаны др. способом) .в теле статора под внутренней поверхностью статора, Между внутренней поверхностью статора и внешней поверхностью ротора имеется равномерный зазор, в который может быть введена смазка. Ротор имеет палец 9 для связи с внешними объектами..Статор мо- жет быть разборным.
Датчик работает следующим образом, В среднем положении ротора 6, когда его ферромагнитная часть 7 перекрывает одинаковые участки катушек 2-5 статора, индуктивности катушек статора равны. При двухкоординатном повороте ротора зоны перекрытия катушек ферромагнитной частью 7 меняются пропорционально углам поворота а,/3 относительно соответствующих осей координат X, Y. Причем любому положению ротора 6 в пределах его рабочего хода, ограниченного пальцем 9, соответствует единственное сочетание индуктйвно- стеи катушек статора. Если приложить одинаковые переменные напряжения к катушкам, то каждому положению ротора в пределах рабочего хода будет соответствовать единственная комбинация токов кату
шек .статора. Для выделения двух независимых сигналов по угловым координатам на выходе датчика используется принцип дифференциального включения
5 0 5
0
попарно симметричных обмоток 2, 3 и А, 5 статора. .
Благодаря тому, что обмотки эквидистантны поверхности статора и вытянуты вдоль меридианов, увеличивается линейность характеристики преобразования датчика. Выполнение ротора полым обеспечивает независимость выходных сигналов по координатам а,{3 .
Формула изобретения Двухкоординатный индуктивный датчик угла поворота, содержащий статор с внутренней сферической поверхностью, разме- щенные на нем две пары катушек индуктивности, расположенных попарно симметрично относительно соответствующей координатной оси, и установленный с возможностью поворота относительно этих осей ротор, имеющий внешнюю сферическую поверхность, одна часть ротора выполнена из ферромагнитного, а другая - из немагнитного материалов, отличающий- с я тем, что, с целью увеличения линейности характеристики преобразования датчика и обеспечения взаимной независимости его выходных сигналов по обеим угловым координатам катушки индуктивности размещены эквидистантно со сферической поверхностью статора, их стороны вытянуты относительно соответствующего меридиана этой поверхности, а ротор выполнен полым.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКООРДИНАТНЫЙ ДАТЧИК | 1971 |
|
SU294074A1 |
| Двухкоординатный датчик углов наклона | 1990 |
|
SU1783291A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| Двухкоординатный датчик угла | 1979 |
|
SU838317A1 |
| Двухкоординатный датчик угла | 1985 |
|
SU1262274A1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| Линейно-цепной электродвигатель | 2020 |
|
RU2736775C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
Изобретение относится к измерительной технике и имеет целью повышение линейности характеристики преобразования двухкоординатного индуктивного датчика .2 угла поворота, а также обеспечение независимости его выходных сигналов один от другого по обеим угловым координатам, Датчик содержит статор с внутренней сферической поверхностью, эквидистантно с которой размещены две пары катушек индуктивности. Удлиненные стороны этих катушек вытянуты вдоль соответствующего меридиана этой поверхности, а ротор выполнен в виде полой сферы частично из ферромагнитного, а частично из немагнитного материалов и установлен с возможностью поворота относительно контролируемых координатных осей.2 ил;
| ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИИ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 0 |
|
SU375473A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Двухкоординатный преобразователь угловых перемещений | 1988 |
|
SU1504494A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
