(54) УСТЮЙСТВО ДЛЯ УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТЮДВИГАТЕЛЯ
игналу задания, а стабилизация - путем змене1шя частоты скольжения 2.
Недостаток данного устройства состоит использовании дополнительного датчика змерения частоты вращения, что усложняет го.
Цель изобретения - упрощение устройтва.
Поставленная цель достигается тем, что в устройстве для управления частотой враения ротора асинхронного электродвигателя, торой вход задатчика скольжения соединен с блоком измерения тока, второй вход сумматора частот соединен с задатчиком частотывращения, вход блока нелинейности подключен к выходу блока измерения тока, а выод - к одному из входов блока задания напряжения, второй вход которого соединен с выходом сумматора частот. Дополнительно для обеспечения регулирования с минимумом тока в блок задания напряжения введен блок автоматической регулировки усиления.
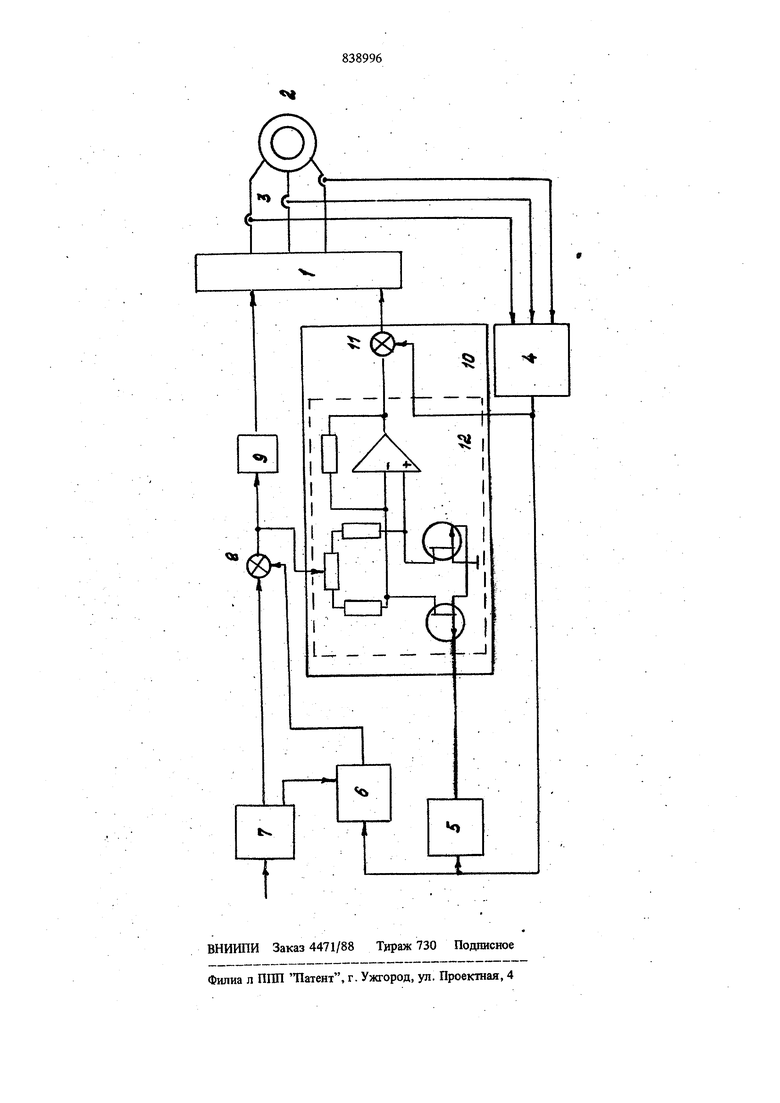
На чертеже представлена функциональная схема устройства.
Устройство для управления частотой вращения ротора асинхронного электродвигателя включает преобразователь 1 частоты, соединенный с acHHxpoijHbiM электродвигателем 2 и через датчики 3 тока - с входами блока 4 выделения амплитуды тока, выход которо0соединен с входами блока 5 нелинейности и блока 6 задания скольжения, второй вход которого соединен с одним из выходов задатчика 7 частоты вращения. Выходы блока 6 задания скольжения и задатчика 7 частоты вращения соединены с входами сумматора
8, выход которого соединен с входом генератора 9 задающих импульсов. Вход генератора зада1ощд1х импульсов соединен также с входом блока К) задания напряжения, выход которого подсоединен к входу преобразователя 1 частоты. Второй вход блока 10 задания напряжения соединен с выходом блока 5 нелинейности. Выход блока 10 задания напряжения соединен со вторым входом преобразователя
1частоты. Один из выходов сумматора 11 блока задания напряжения соединен с выходом блока 4 выделения амплитуды тока. Второй вход сумматора 11 соединен с выходом, блока 12 автоматической регулировки усиления блока 10 ; задания напряжения. .
Устройство для управления частотой вращения )отора асинхронного электродвигателя работает следующим образом.
Для разгона асинхронного электродвига.теля на вход задатчика 7 частоты вращения подают задающее напряжение, которое возрас-. тает по линейному закону. В зависимости от знака производной выходного напряжения
задатчика 7 частоты вращения в блоке 6 задания скольжения задается знак абсолютного скольжения (+ при разгоне). На выходе блока 6 задания скольжения возникает напряжение положительной полярности задания начального скольжения. При поступлении этого напряжения на вход сумматора 8 происходит суммирование последнего с линейно нарастающим напряжением (сигналом .задания скорости) с выхода задатчика 7 частоты вращения, с выхода сумматора 8 сигнал поступает на вход генератора 9 задающих импульсов и одновременно на вход блока 12 автоматической регулировки усиления блока 10 задания напряжения для задания выходного напряжения начальной частоты преобразователя 1 частоты. С выхода генератора 9 задающих импульсов сигнал с заданной частотой напряжения поступает на вход преобразователя 1 частоты, управляющий частотой выходного напряжения. Блок 10 задания напряжения вырабатывает в функции сигнала задания частоты сигнал, управляющий напряжением преобразователя I частоты по оптимальному закону - по минимуму тока для заданного момента асинхронного электродвигателя
V V,(i,) .+ V2(il)- ,(1)
гдеfj - частота напряжения, питающего асинхронный электродвигатель;
fi - номинальная частота напряжения;
Vi (ii) ,V2 (ii) - функции, зависящие от модуля тока статора ij I ill .
При этом функция V2 (ii) аппроксимируется линейным законом v, (ij) kii, где К - коэффициент усиления на входе сумматора 11.
Vi(ii) и К расчитываются для фиксиро-; ванных значений момента асинхронного электродвигателя 2 с Отысканием оптимального абсолютного скольжения, обеспечивающего минимум тока статора ii для каждого момента асинхронного электродвигателя 1.
Сигнал начальной частоты f j, равный сигналу начального абсолютного скольжения, подается на вход блока 12 автоматической регулировки усиления блока 10 задания напряжения, где усиливается с начальным коэффициентом усиления V2(ii) KQ. На вход преобразователя 1 частоты подается сигнал задания начального напряжения. С выхода преобразователя 1 частоты трехфазное напряжение с частотой скольжения и начальной амплитудой наводит ток ,в обмотках статора асинхронного электродвигателя 2, что вызывает появление мом€нта вращения, происходит разгон асинхронного электродвигателя 2. Через датчики 3 тока ток поступает на вход блока 4 выделения амплитуды тока, с выхода которого сигнал постурает через блок 5 нелинейности на другой вход блока 10 задания напряжения, а также- на блок 6 задания скольжения и непосредственно на один из входов сумматора 11 блока задания напряжения.
В соответствии с законом оптимального уп равнения напряжением (1) сигнал Vi(ii), пропорциональный модулю тока ii, вводится на вход сумматора 11 блока 10 заданий напряжения, иа вуорой вход которого подается сигнал v2(ij)-- . причем функции ) реализуется блоком нелинейности 5, а сигнал J..
поступает со входа генератора
частоты
flH
задающих импульсов на вход блока 12 авто-матической регулировки усиления блока 10 заданий напряжения, на выходе которого возникает сигнал с переменным козффициентом усиления, управляемым выходным сигналом, пришедшим на другой вход блока 12 автоматической регулировки усиления с блока 5 нелинейности. При этом благодаря; оптимальному закону регулирования напряжения в функции сигнала частоты и сигналов выхода блока 5 нелинейности и с выхода блока 4 выделения амплитуды тока пуск асинхронного электродвигателя происходит при постоянстве тока статора, величина которого определяется интенсивностью нарастающего напряжения с выхода задатчика 7 частоты вращения с постоянным абсолютным скольжением, однозначно определяемым блоком 6 задания скольжения в функции тока ii, и с максимальным моментом для этого значения тока за счет форсировки потока тем большей, чем больше интенсивность разгона и величины тока статора. В установившемся режиме частота и напряжение поддерживаются в соответствии с постоянным выходным сигналом задатчика 7 частоты вращения таким образом, что для заданного момента нагрузки на валу асинхронного электродвигателя 2 абсолютное скольжение и величина напряжения обеспечивают минимальный ток в обмотках статора асинхронного электродвигателя 2 при любой заданной скорости . При увеличении нагрузки на валу асинхронного электродвигателя 2 уменьшается частота вращения ротора и возрастает действительное скольжение асинхронного злектродвигателя 2, при этом через блок 6 задания скольжения возрастает сигнал .задания абсолютного скольжения и частота выходного напряжения преобразователя 1 частоты, а через блок 10 задания .напряжения возрастает напряжение по закону (1). Это вызывает увеличение выходного напряжения преобразователя 1 частоты, а значит потока и момента асинхронного электродвигателя 2, и позволяет достичь первоначальной частоты вращения, соответствующей сигналу задания частоты вращения, с минимальной.
5 величиной тока для этого момента нагрузки асинхронного электродвигателя 2, что обеспечивает высокую перегрузочную способность асинхронного электродвигателя и увеличивает жесткость механических характеристик, что
о позволяет расширить диапазон регулирования частоты вращения ротора асинхронного злектродвигателя.
Преимуществом устройства для управления частотой вращения ротора асинхронного элек5 тродвигателя является повышенная перегрузочная способность, достигнутая форсировкой напряжения не только в функции частоты, но и в функции тока таким образом, что для каждого заданного тока асинхронный электроQ двигатель развивает максимально достижимый момент. Исключение датчика частоты вращения привело к упрощению устройства.
Формула изобретения
5 Устройство для управления частотой вращения ротора асинхронного злектродвигателя, содержащее преобразователь частоты, соединенный первым входом с выходом генератора задающих импульсов, сзтлматор частот, выход которого соединен с входом генератора задающих импульсов, а вход - с задатчиком скольжения, первый вход которого подключен к задатчику скорости, блок измерения тока в фазах статорной обметки электродвигателя, соединенный с блоком сравнения, второй вход которого подключен к блоку задания напряжения, а выход - ко второму входу преобразователя частоты, блок нелинейности, отличающееся тем,
что, о целью упрощения, второй вход задатчика скольжения соединен с указанным блоком измерения тока, второй вход сумматора частот соединен с задатчиком скорости, вход блока нелинейности подключен к выходу блока измерения тока, а выход - к одному из входов блока задания напряжения, второй вход которого соединен с выходом сумматора частот.
2. Устройство по п. 1, о т л и ч а ющ е е с я тем, что в блок задания напряжения введен блок, автоматической регзлировки усиления, выход которого является выходом блока задания напряжения.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 635589. кл. Н .02 Р 7/42, 1975. .
2. Патент Великобритании № 1120477. кл. G 3 R, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| Способ управления электроприводом переменного тока и устройство для его осуществления | 1976 |
|
SU656175A1 |
| Устройство частотного управления асинхронным электроприводом | 2017 |
|
RU2660460C1 |
| Привод стиральной машины | 1988 |
|
SU1583501A1 |
| Электропривод переменного тока | 1987 |
|
SU1432711A1 |
| Электропривод переменного тока | 1987 |
|
SU1429272A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |