1
Изобретение относится к системам келезнодорожной автоматики и телеме-{аники для автоматической остановки лодвижного состава в заданной точке пути.
Известно устройство для прицельной остановки поезда, содержащее установленные на локомотиве приборы управления локомотивом, связанные через дешифратор и приемник сигналов расстояния до точки остановки с локомотивной антенной, индуктивно связанной с двухпроводной линией связи, размещенной на участке пути между рельсами, которая через установленный на пути согласующий блок соединена с передатчиком сигналов расстояния до точки остановки, с шифратором и с блоком автоматического управления сигналами торможения, к которому подключены три путевых датчика, соединенных с,соответствующими блоками фиксации точек торможения ll.
Недостатком известного устройства является ручное управление процессом торможения поезда, что не позволяет получить высокую точность торможения и остановки поезда.
Цель изобретения - расширение функциональных возможностей устройства.
Поставленная цель достигается тем, что устройство снабжено установленными на локомотиве генератором и передатчиком сигналов опорной частоты, подключенными к локомотивной антенне , а блок автоматического ynpaBjie0ния сигналами торможения выполнен из связанных между собой тактового генератора, приемника опорной частоты, элемента управления приемопередатчиком, элемента коррекции про5граммного торможения, элемента коррекции фактической скорости поезда и элемента определения координат поезда, три входа которого подключены к соответствующим блокам фиксации
0 точек торможения, а выход подключен к одному входу элемента коррекции программного торможения, другой вход и выход которого подключены, соответственно, к одному выходу и одному
5 входу элемента коррекции фактической скорости поезда, третий вход подключен к одному выходу.тактового генератора, другой выход которого подключен к приемнику и передатчику через 0 элемент управления приемопередатчиком, а выход щ иемника и вход шяфра тора подключены, соответственно, к третьему входу и другому выходу элемента коррекции фактической скорости поезда.
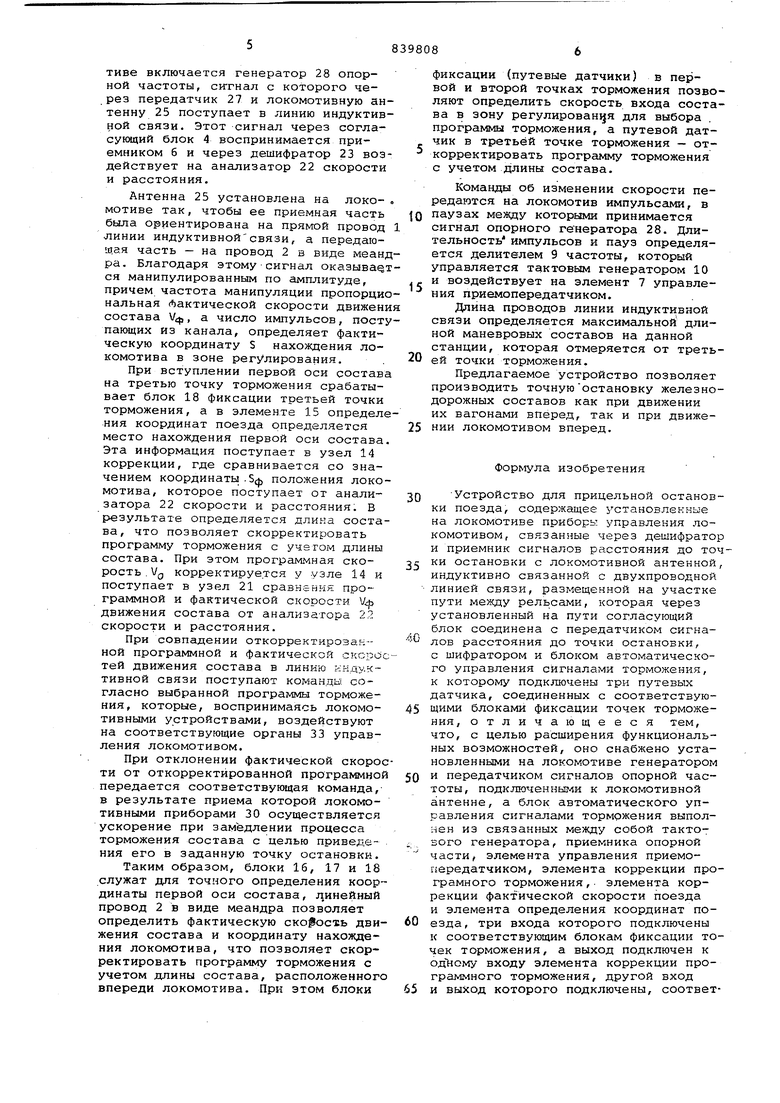
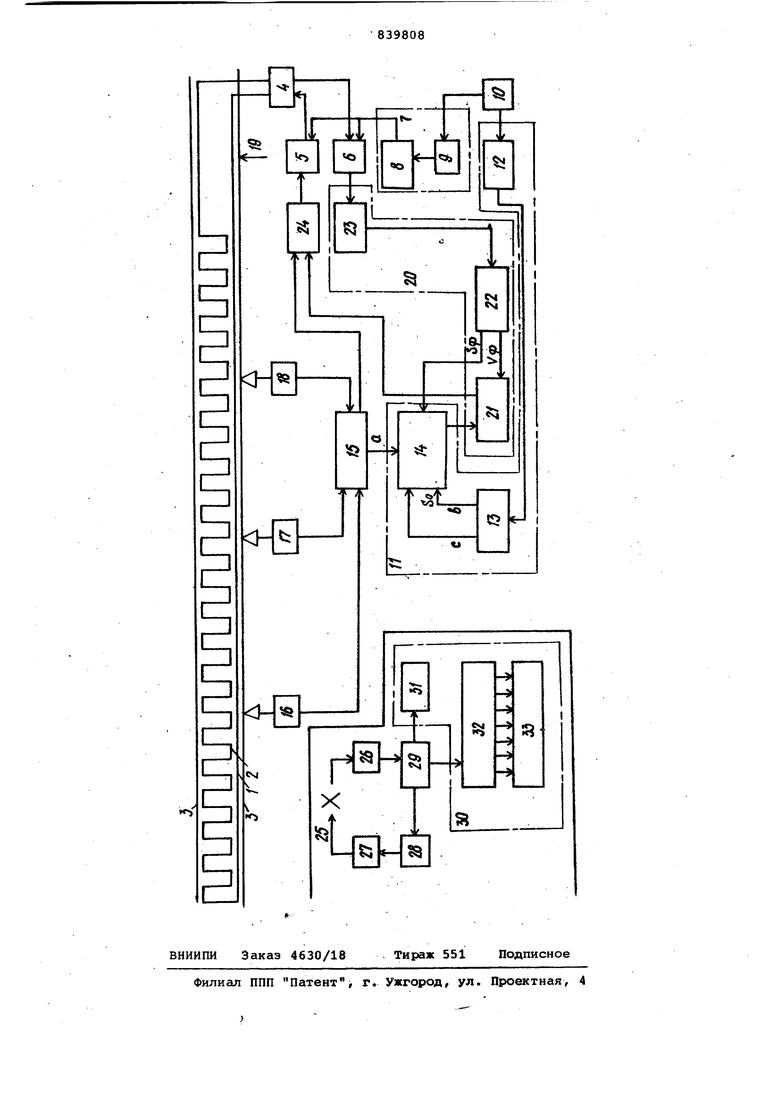
На чертеяе представлена функциональная структурная схема устройства,
Двухпроводная линия индуктивной связи с пряьвлм проводом 1 и проводом в виде меандра расположёна в колее, рельсового пути 3 и через согласующий блок 4 подключена к установленным на пути передатчику 5 и приемнику б опорной частоты, к KOTOIM M также подключен элемент 7 управления приемопередатчиком, который содержит узел 8 коммутации и делитель 9 частоты, соединенный с тактовым генератором 10.
Тактовый генератор 10 соединен с элементом 11 коррекции программного торможения, имеющим вход а и содержащим датчик 12 времени, узел 13 программного торможения и узел 14 коррекции. Тактовый генератор 10 через датчик 12 времени соединен с узлом 13 программного торможения, выходы b и с которого подключены к узлу 14 коррекции.
К первому входу а элемента 11 коррекции программного торможения подкЛочен выход элемента 15 определения координат поезда (локомотива и конца поезда), а его входы подсоединены к блокам 16, 17 и 18 фиксации (путевые датчики), соответственно, первой второй и Третьей точек торможения, оборудованных путевыми датчиками, раположенными на.пути 3 на заданном расстоянии друг от друга и от места остановки первой по ходу колесной пары 19, Второй выход элемента 11 коррекции соединен с входом элемента 20 коррекции фактической скорости поезда, содержащего узел 21 сравнения программной и фактической скоростей, анализатор 22 скорости и расстояния до точки остановки первой колесной пары 19 и дешифратор 23 сигналов опорной частоты.
Вход дешифратора 23 соединен с приемником б, а выход - с анализатором 22 скорости и расстояния, один выход которого соединен с узлом 14 коррекции элемента 11 коррекции программного торможения, а другой оединен с входом узла 21 сравнения програ ялной и фактической скоростей. Один из выходов элемента 15 определения координат поезда соединен с шифратором 24 сигналов расстояния до точки остановки.
Кроме того, устройство включает установленную на локомотиве антенну 25, подключенную к приемнику 26 сигналов расстояния до точки остановки и к передатчику 27 сигналов опорной частоты, связанным между собой через
генератор 28 опорной частоты и дешифратор 29, .выходы которого соединены с приборами 30 управления локомотивом, включакадими пульт 31 машиниста, блок 32 управления локомотивом, соединенный с органами 33 управленяя локомотивом.
Устройство работает следующим образом.
При отсутствии маневрового состава в пределах железнодорожного пути 3 блоки 16, 17 и 18 фиксации, соответственно, первой, второй и третьей точек торможения, элемент 15. определения координат поезда и шифратор 24 настраивают передатчик 5 на передачу в линию индуктивной связичерез согласующий блок 4 частоты F .
Вступление первой оси состава в зону срабатыбания первого путевого датчика фиксируется блоком 16 фиксации первой точки торможения, элемент 15 определения координат поезда через шифратор 24 пеоестраивает передатчик 5 на передачу в линию индуктивной связи команды о вступлении состава в зону регулирования. Эта информация принимается локомотивной ан тенной 25 и через локомотивный приемник 26 поступает в локомотивный дешифратор 29. При этом машинист через блок 32 управления локомотивом производит воздействие на соответствующие органы 33 управления локомотивом для подготовки к снижению скорости движения поезда. Эта информация передается на локомотив до вступления первой оси состава на вторую точку торможения. Одновременно включается датчик 12 времени, который управляется тактовым генератором 10,
При вступлении первой оси состава в зону действия второго путевого датчика, что определяется блоком 17 фиксации . второй точки торможения, срабатывает элемент 15 определения координат поезда, по выходному сигналу которого и по меткам времени, полученным от датчика 12 времени, в узле 13 программного торможения определяется начальная скорость движения поезда и выбирается программа его торможения для остановки в нужной точке. При этом через узел 14 коррекции и узел 21 сравнения скорости шифратор 24 настраивает передатчик 5 на передачу в линию индуктивной связи команд снижения скорости движения состава согласно выбранной программы торможения. Эта информация принимается локомотивной антенной 25 и приемником 26 и после дешифрирования в дешифраторе 29 воздействует на соответствующие приборы 30 управления локомотивом. На пульте 31 машиниста загорается цифровая индикация, показывающая текущую скорость движения состава. Одновременно на локомотиве включается генератор 28 опорной частоты, сигнал с которого через передатчик 27 и локомотивную антенну 25 поступает в линию индуктивной связи. Этот сигнал через согласующий блок 4 воспринимается приемником б и через дешифратор 23 воздействует на анализатор 22 скорости и расстояния.
Антенна 25 установлена на локомотиве так, чтобы ее приемная часть была ориентирована на прямой провод линии индуктивнойсвязи, а передающая часть - на провод 2 в виде меандра. Благодаря этому-сигнал оказыва тся манипулированным по амплитуде, причем частота манипуляции пропорциональная (Фактической скорости движени состава V, а число импульсов, поступающих из канала, определяет фактическую координату S нахождения локомотива в зоне регулирования.
При вступлении первой оси состава на третью точку торможения срабатывает блок 18 фиксации третьей точки торможения, а в элементе 15 определения координат поезда определяется место нахождения первой оси состава. Эта информация поступает в узел 14 коррекции, где сравнивается со значением координать .5ф положения локомотива, которое поступает от анализатора 22 скорости и расстояния. В результате определяется длина состава, что позволяет скорректировать программу торможения с учетом длины состава. При этом программная скорость . Vg корректируется у узле 14 и поступает в узел 21 сравнения программной и фактической скорости Udj движения состава от анализатора 22 скорости и расстояния.
При совпадении откорректированной программной и фактической скоростей движения состава в линию кнду.ктивной связи поступают команды согласно выбранной программы торможения, которые, воспринимаясь локомотивными устройствами, воздействуют на соответствующие органы 33 управления локомотивом.
При отклонении фактической скорости от откорректированной программной передается соответствующая команда, в результате приема которой локомотивными приборами 30 осуществляется ускорение при замедлении процесса торможения состава с целью приведения его в заданную точку остановки.
Таким образом, блоки 16, 17 и 18 служат для точного определения координаты первой оси состава, л.инейный провод 2 в виде меандра позволяет определить фактическую движения состава и координату нахождения локомотива, что позволяет скорректировать программу торможения с учетом длины состава, расположенного впереди локомотива. При этом блоки
фиксации (путевые датчики) в первой и второй точках торможения позволяют определить скорость входа состава в зону регулирован1|я для выбора программы торможения, а путевой датчик в третьей точке торможения - откорректировать программу торможения с учетом длины состава.
Команды об изменении скорости передаются на локомотив импульсами, в
паузах между которыми принимается сигнал опорного генератора 28. Длительность импульсов и пауз определяется делителем 9 частоты, который управляется тактовым генератором 10 и воздействует на элемент 7 управления приемопередатчиком.
Длина проводов линии индуктивной связи определяется максимальной длиной маневровых составов на данной станции, которая отмеряется от третьей точки торможения.
Предлагаемое устройство позволяет производить точную остановку железнодорожных составов как при движении их вагонами вперед, так и при движении локомотивом вперед.
Формула изобретения
устройство для прицельной останов0ки поезда, содержащее установленные на локомотиве приборы управления локомотивом, связанные через дешифратор и приемник сигналов расстояния до точки остановки с локомотивной антенной,
5 индуктивно связанной с двухпроводной линией связи, размещенной на участке пути между рельсами, которая через установленный на пути согласующий блок соединена с передатчиком сигналов расстояния до точки остановки, с шифратором и блоком автоматического управления сигналами торможения, к которому подключены три путевых датчика, соединенных с соответствующими блоками фиксации точек торможе5ния, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено установленными на локомотиве генератором и передатчиком сигналов опорной час0тоты, подключенНЕЛ«1И к локомотивной антенне, а блок автоматического управления сигналами торможения выполнен из связанных между собой тактового генератора, приемника опорной части, элемента управления приемопередатчиком, элемента коррекции програмного торможения, элемента коррекции фактической скорости поезда и элемента определения координат по0езда, три входа которого подключены к соответствующим блокам фиксации точек торможения, а выход подключен к одному входу элемента коррекции программного торможения, другой вход
5 и выход которого подключены, соответственно, к одному выходу и одному входу элемента коррекции фактической скорости поезда, третий вход подклю- чей к одному выходу тактового генератора j другой выход которого подключен к приемнику и передатчику через элемент управления приемопередатчиком, а выход приемника и вход шифратора подключены, соответственно, к
третьему входу и другому выходу элемента коррекции фактической скорости поезда.
Источники информации, .принятые во внимание при экспертизе 1. Казаков А.А и др. Система точной, остановки подвижного состава. Промышленный транспорт, 1978, № 5, с. 20.
Л
L.
«аь
ti
J I
§1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство интервального регулирования движения поездов | 1981 |
|
SU954298A1 |
| Устройство для передачи и приема информации на транспортном средстве | 1983 |
|
SU1092080A1 |
| Устройство для управления движением поезда метрополитена | 1981 |
|
SU1041375A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714824C1 |
| Система интервального регулирования движения поездов на основе спутниковых навигационных средств и цифрового радиоканала с координатным методом контроля | 2016 |
|
RU2618659C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ МАНЕВРОВОГО ЛОКОМОТИВА | 2005 |
|
RU2284275C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2018 |
|
RU2685109C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| Система интервального регулирования движения поездов | 2020 |
|
RU2746629C1 |
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
л г
«5
С
|S
CSJ
X
f)
Lra
и
п
iv
SS
-5 -4
-
ин
