1
Изобретение относится к оборудованию мостовых кранов металлообрабатывающих предприятий, конкретно к конструкции грузозахватных устройств для транспортирования металлических листов.
Известна конструкция электромагнитного захвата, содержащего закрепленные на траверсе грузовые электромагниты, и подвижно установленные на ней подхватные цепи с приводом L1
Недостатком известной конструкции является отсутствие механического зажатия транспортируемого груза, что не гарантирует от падения его в случае обесточивания электромагнитов .
Известен также автоматический электромагнитный захват, содержащий навешиваемую на крюк крана траверсу, смонтированные на ней грузовые электромагниты, поворотные рычаги и привод поворота рычагов 2J
Недостатками такого захвата является отсутствие механического зажатия листов - листы свободно опираются на рычаги и удерживаются на них за счет собственной жесткости что исключает возможность использования этих захватов по условиям техники
безопасности в обслуживаемых людьми пролетах.
Цель изобретения - повышение надежности работы захвата.
Указанная цель достигается тем, что захват снабжен двумя парами ползунов, установленных на траверсе с возможностью перемещения в вертикальной плоскости, на нижних концах од0ной пары ползунов закреплены несущие цепи с кольцами и фиксаторы для колец, а на нижних концах .другой пары ползунов смонтированы соответствующие кольцам грузовые крюки, при
5 этом на концах поворотных рычагов установлены вспомогательные электромагниты для колец цепей, верхние концы ползунов посредством тяг соединены с крюком крана, а траверса сое0динена с крюком крана посредством силового цилиндра и гибких тяг.
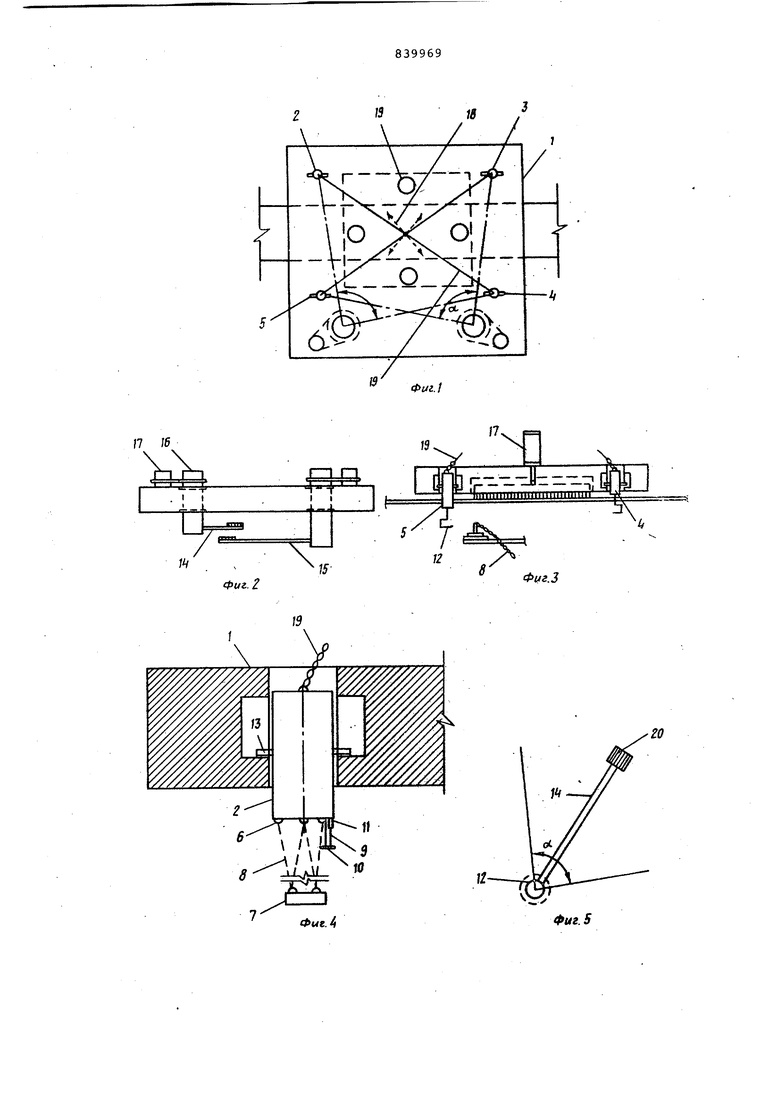
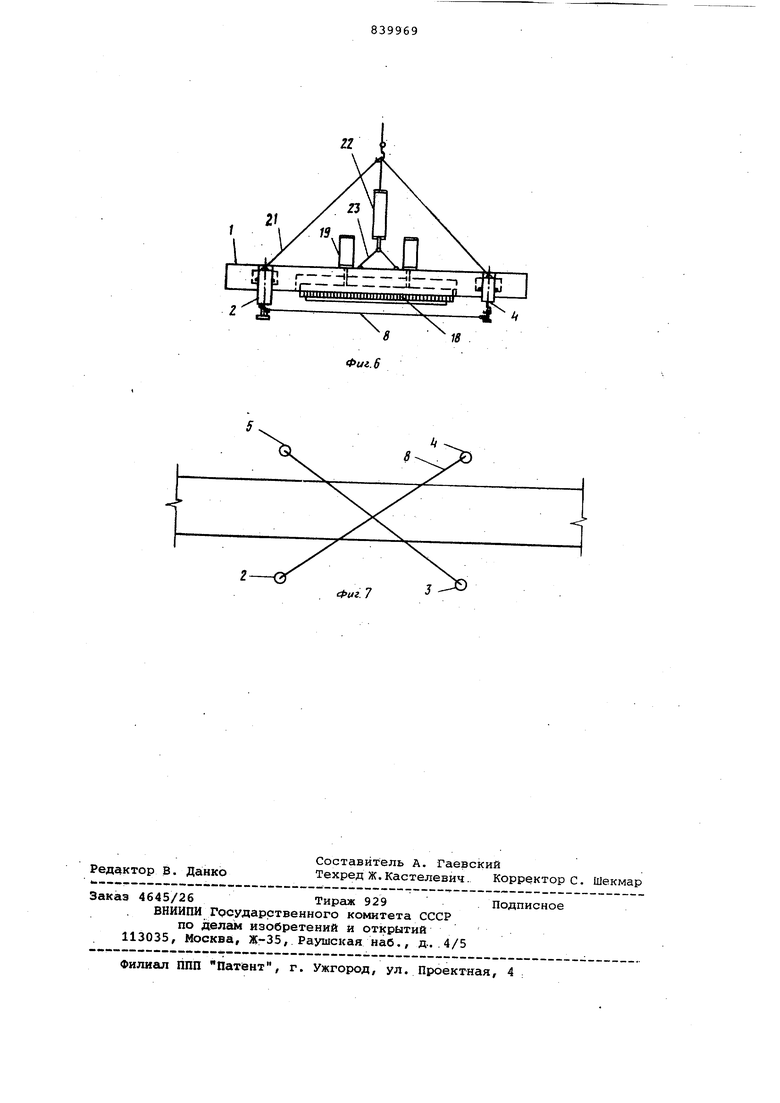
На фиг. 1 изображен захват в плане, вид сверху; на фиг. 2 - поворотные рычаги, вид сбоку; ; на фиг. 3 5рычаги и ползуны с грузовыми крюками в процессе переноса кольца цепи; на фиг. 4 - ползун с закрепленной на нем грузовой цепью и зафиксированным кольцом; на фиг. 5 - поворотный .рычаг; нафиг. 6 захват в момент
0
захвата груза/ на фиг, 7 - расположение несущих цепей в момент транспортировки груза (вид на захват снизу) .
Захват состоит из траверсы 1, в которой установлены две пары ползунов 2 и 3 4 и 5. Высота ползунов 2 и 4 меньше высоты ползунов 3 и 5. На нижних концах ползунов 2 и 3 при помощи петель б запасованы через противовес 7 несущие цепи 8. На свободном конце цепи закреплено кольцо 9 с шайбой 10. В нижней части пол-зунов 2 и 3 закреплены также фиксаторы 11 для ориентации положения кольца. На ползунах 5 и 4 в их нижней части закреплены соответствующие кольцам 9 грузовые крюки 12.
Все ползуны установлены на траверсе с возможностью перемещения по вертикали и имеют ограничители 13 перемещения.
На траверсе установлены поворотные в горизонтальной плоскости рычаги 14 и 15, каждый из которых закреплен на барабане 16, имегацем привод 17, и грузовые электромагниты 18, соединенные со штоками пневмоцилиндров 19. На концах рычагов 14 и 15 закреплены вспомогательные электромагниты 20.
VJ Верхние концы ползунов 2, 3, 4 и 5 соединены тягами 21 с крюком крана Между крюком и траверсой установлен также пневмоцилиндр 22, к штоку которого и к траверсе прикреплены гибкие тяги 23.
В статическом положении тяги 21 ослаблены и вес траверсы 1 передается на крюк крана через гибкие тяги 23. Электромагнит 18 и вспомогательные электромагниты 20 выключены, шток каждого пневмоцилиндра 19 свободно опущен в крайН(Эе нижнее положение, противовес 7 свободно опущен КОЛЬЦО 9 с шайбой 10 зафиксировано на соответствующем ползуне 2 и 3. Все ползуны находятся в нижнем положении.
Работа захвата включает две операции: захватывание листа и механическую фиксацию листа относительно траверсы. На первом этапе работы траверса 1 опускается на захватываемый лист, лежащий сверху пакета, до соприкосновения с ним электромагнитов 18, которые включаются и притягивают лист. После этого штоки пневмоцилиндров 19 поднимаются вверх до упора и фиксируются в этом положении, а траверса с захваченным листом
приподнимается над пакетом, чтобы обеспечить зазор для перемещения рычагов Я цепей. На втором этапе включаются приводы 17, рычаги 14 и 15 поворачиваются на угол и-остае навливаютс,я, соприкасаясь электромагнитами20 с шайбами 10. Включают. ся электромагниты 20, притягивая шайбы и рычаги 14 и 15 при обратном повороте, переносят кольца 9 на соответствующие крюки ползунов 4 и 5,
При этом кольца растягивают несущие цепи 8 в положение, показанное на фиг. 7. Вспомогательные электромагниты отключаются, а шток пневмоцилиндра 22 выдвигается, ослабляя гибкие
5 тяги 23, а тяги 21, натягиваясь, поднимают ползуны 2, 3, 4 и 5 в верхнее положение, осуществляя зажим листа цепями 8. Эсе электромагниты и пнев-. моцилиндры выключаются, и лист транспортируется как на обычных стропах.
Процесс освобождения захваченного листа осуществляется в обратной последовательности .
Формула изобретения
Автоматический электромагнитный захват, содержащий навешиваемую на
Q крюк крана траверсу, смонтированные на ней грузовые электромагниты, поворотные рычаги, и привод поворота рыча-гов, о т личающ и и с я тем, что, с целью повышения надежности его работы, он снабжен двумя парами ползунов, установленных на тра- верее с возможностью перемещения в вертикальной плоскости, на нижних концах одной пары ползунов закреплены несущие цепи с кольцами и фиксаторы для колец, а на нижних концах другой пары ползунов смонтированы соответствующие кольцам грузовые крюки, при этом на концах поворотных рычагов установлены вспомогательные электромагниты для колец цепей, верхние концы ползунов посредством тяг соединены с крюком крана, а траверса соединена с крюком крана посредством силового цилиндра и гибких
0
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР по заявке № 2536269, кл. В 66 С 1/06, 1978.
2.Авторское свидетельство СССР № 512977, кл; В 66 С 1/06, 1976
(прототип).
18
L-L ,
ФИ1.
/7 Ш
т
ц
ISФиг.. 2
17
IS
:v
.
П
illlflllllllinTiniHl llllllllll
.
57
8
Фчг.З мг. 4 Фиг. 5
п
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБВЯЗКИ ПАКЕТА МЕТАЛЛА | 1996 |
|
RU2108948C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ПРЕССОВ | 1966 |
|
SU224470A1 |
| Грейферное подающее устройство к прессу | 1987 |
|
SU1433594A1 |
| Захват для извлечения железобетонных изделий из форм | 1977 |
|
SU660918A1 |
| Кран | 1988 |
|
SU1523528A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| Захватное устройство для контей-HEPOB | 1979 |
|
SU816932A1 |
| Грузоподъемное устройство крана | 1982 |
|
SU1081117A1 |
| Устройство для захвата пакетов лесоматериалов | 1978 |
|
SU768741A1 |
ерчг. 7
