/J
11
подвеска 7, несущая грузоподъемную траверсу 9, с электромагнигньми захватами 10. На мостовой балке жестко закреплены механические захваты с поворотными в горизонтальной плоскости подхватными лапами 14. Кран снабжен механизмом гашения колебаний грузовой подвески 7, выполненный в виде двух параллельных плоских шарнирно-рычаж- ных многозвенников, верхние рычаги 11 которьгх шарнирно смонтированы на грузовой подвеске 7, а нижние рычаги 12 выполнены двуплечими, закреплены на траверсе 9 и соединены между собой планками 13. Наличие механических захватов наряду с электромагнитными позволяет в ряде случаев удергивать подаваемые листы при перемещении крана механическими захватами при отключенных электромагнитах, что в свою очередь позволяет экономить электроэнергию. 3 ил.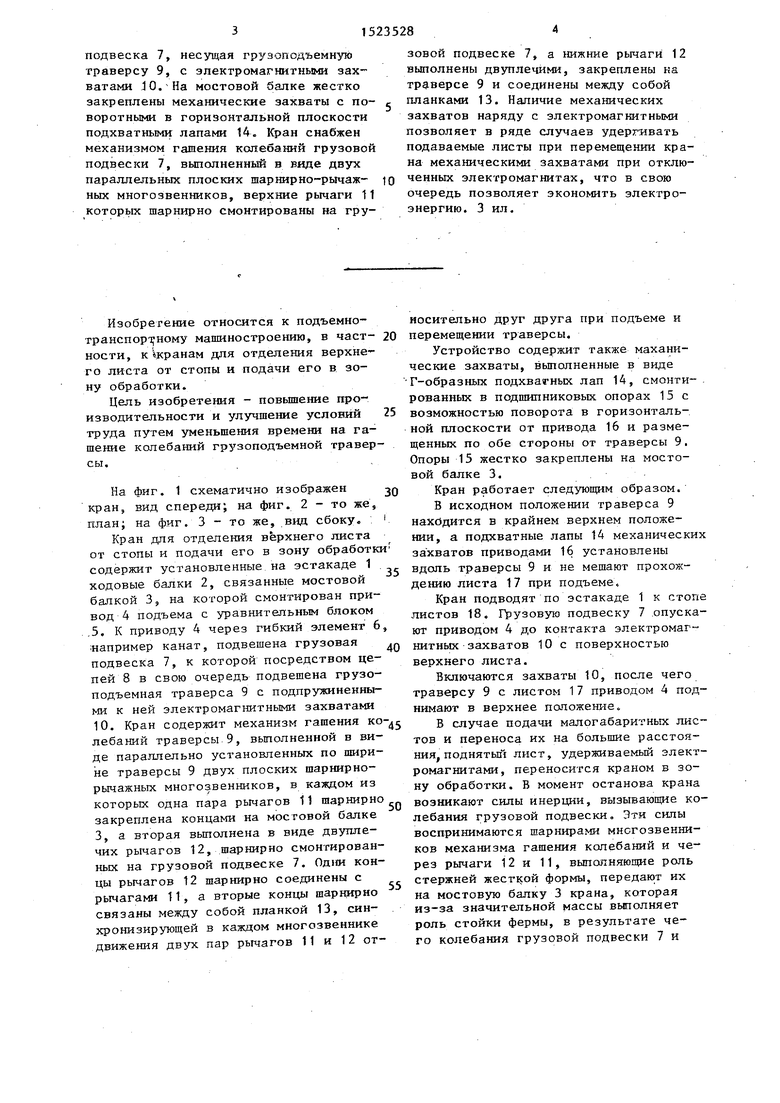
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран мостового типа | 1980 |
|
SU893826A2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство | 1985 |
|
SU1321660A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| Грузозахватное устройство | 1990 |
|
SU1744034A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Захватное устройство для длинномерных грузов | 1981 |
|
SU1071565A1 |
| Грузозахватное устройство для контейнеров с верхним несущим поясом | 1976 |
|
SU667483A1 |
| Грузозахватное устройство для пакетированных грузов | 1988 |
|
SU1664716A1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к кранам для отделения верхнего листа от стопы и подачи его в зону обработки. Цель изобретения - повышение производительности и улучшение условий труда путем уменьшения времени на гашение колебаний грузоподъемной траверсы. Кран содержит установленную на ходовых балках мостовую балку, на которой закреплена грузовая подвеска 7, несущая грузоподъемную траверсу 9, с электромагнитными захватами 10. На мостовой балке жестко закреплены механические захваты с поворотными в горизонтальной плоскости подхватными лапами 14. Кран снабжен механизмом гашения колебаний грузовой подвески 7, выполненный в виде двух параллельных плоских шарнирно-рычажных многозвенников, верхние рычаги 11 которых шарнирно смонтированы на грузовой подвеске 7, а нижние рычаги 12 выполнены двуплечими, закреплены на траверсе 9 и соединены между собой планками 13. Наличие механических захватов наряду с электромагнитными позволяет в ряде случаев удерживать подаваемые листы при перемещении крана механическими захватами при отключенных электромагнитах, что в свою очередь позволяет экономить электроэнергию. 3 ил.
Изобретение относится к подъемно- транспор- ному машиностроению, в част- ности, к Экранам для отделения верхнего листа от стопы и подачи его в зону обработки.
Цель изобретения - повышение производительности и улучшение условий труда путем уменьшения времени на гашение колебаний грузоподъемной траверсы.
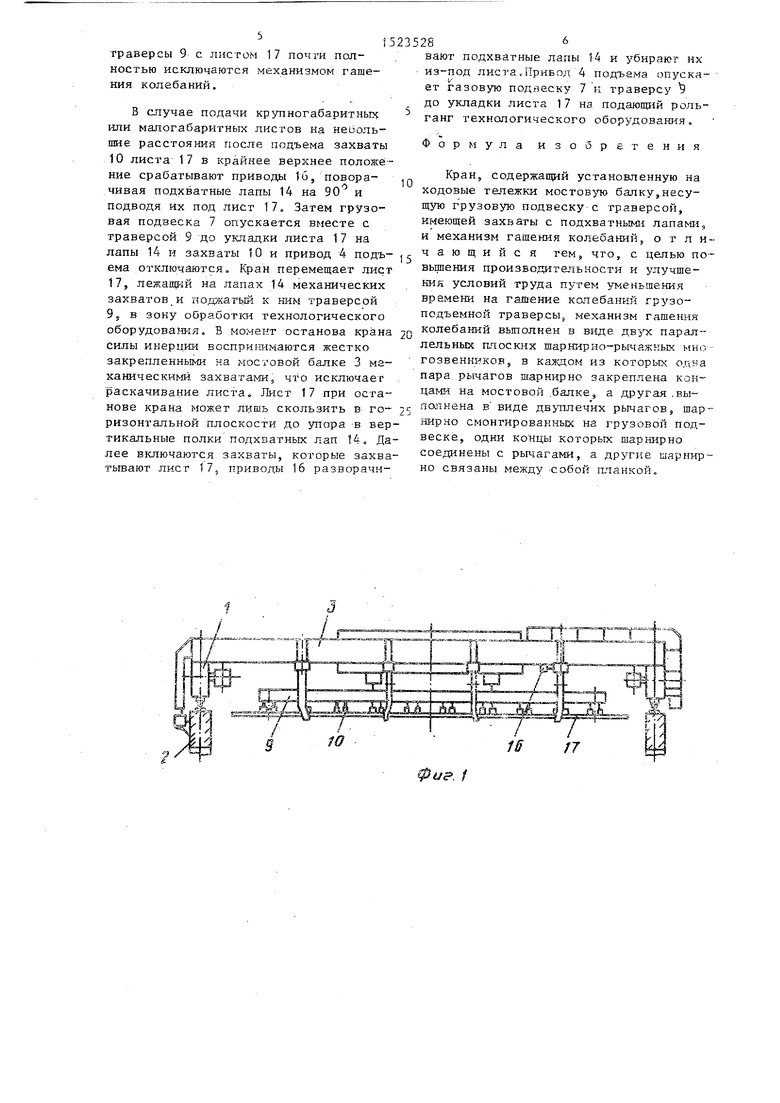
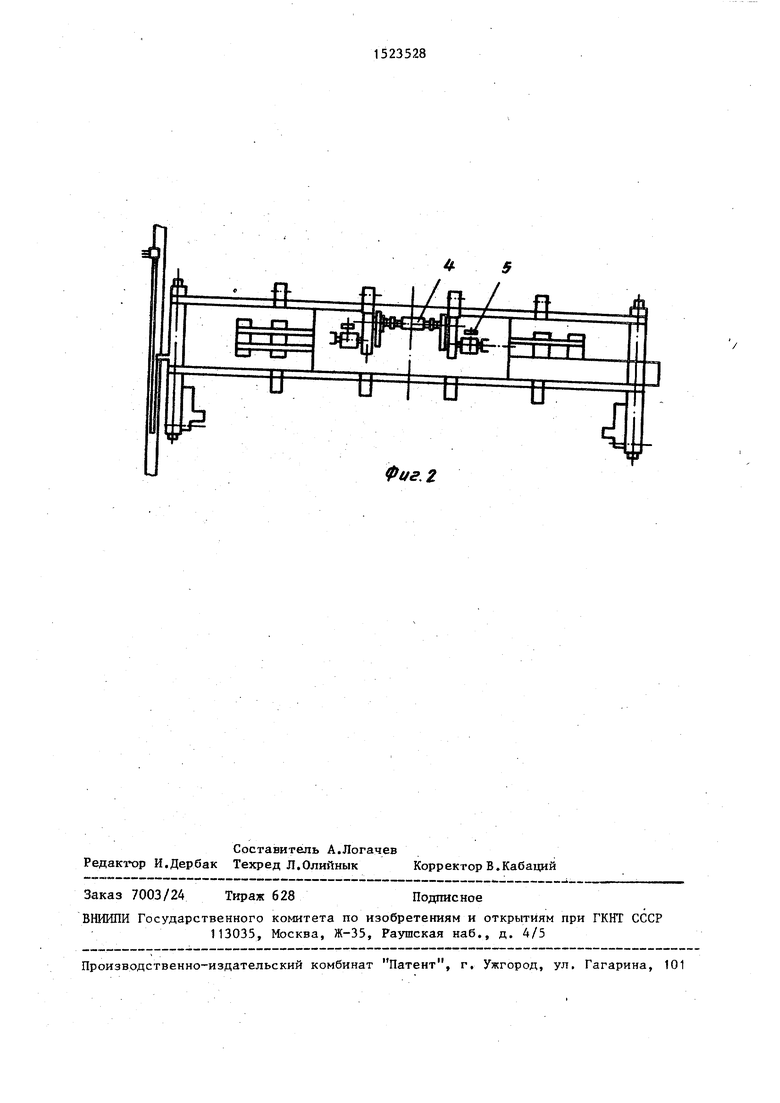
На фиг. 1 схематично изображен кран, вид спереди; на фиг. 2 - то же, план; на фиг. 3 - то же, вид сбоку.
Кран для отделения верхнего листа от стопы и подачи его в зону обработк содержит установленные.на эстакаде 1 ходовые балки 2, связанные мостовой балкой 3, на которой смонтирован привод 4 подъема с уравнительным блоком .5. К приводу 4 через гибкий элемент 6 например канат, подвешена грузовая подвеска 7, к которой посредством цепей 8 в свою очередь подвешена грузоподъемная траверса 9 с подпружиненными к ней электромагнитными захватами 10. Кран содержит механизм гашения ко лебаний траверсы 9, выполненной в виде параллельно установленных по пшри- не траверсы 9 двух плоских шарнирно- рычажных многозвенников, в каждом из которых одна пара рычагов 11 шарнирно закреплена концами на мостовой балке 3, а вторая выполнена в виде двуплечих рычагов 12, шарнирно смонтирован- ньЕХ на грузовой подвеске 7. Од1Ш концы рычагов 12 шарнирно соединены с рычагами 11, а вторые концы шаршфно связаны между собой планкой 13, синхронизирующей в каждом многозвеннике движения двух пар рычагов 11 и 12 от
носительно друг друга при подъеме и перемещении траверсы.
Устройство содержит также махани- чеекие захваты, вьтолненные в виде Г-образных подхвагных лап 14, смонти- - рованных в подшипниковых опорах 15 с возможностью поворота в горизонтальной плоскости от привода 16 и размещенных по обе стороны от траверсы 9, Опоры 15 жестко закреплены на мостовой балке 3.
Кран работает следующим образом.
В исходном положении траверса 9 находится в крайнем верхнем положении, а подхватные лапы 14 механических захватов приводами 16 установлены вдоль траверсы 9 и не мешают прохождению листа 17 при подъеме.
Кран подводят по эстакаде 1 к стопе листов 18. Грузовую подвеску 7 опускают приводом 4 до контакта электромагнитных захватов 10 с поверхностью верхнего листа.
Включаются захваты 10, после чего траверсу 9 с листом 17 приводом 4 поднимают в верхнее положение.
В случае подачи малогабаритных листов и переноса их на большие расстояния, поднятый лист, удерживаемый электромагнитами, переносится краном в зону обработки. В момент останова крана возникают силы инерции, вызывающие колебания грузовой подвески. Эти силы воспринимаются шарнирами многозвенников механизма гашения колебаний и через рычаги 12 и 11, выполняющие роль стержней жесткой формы, передают их на мостовую балку 3 крана, которая из-за значительной массы выполняет роль стойки фермы, в результате чего колебания грузовой подвески 7 и
ностью исключаются ния колебаний.
механизмом гаше
В случае подачи крупногабаритных или малогабаритных листов на неооль- шие расстояния после подъема захваты 10 листа 17 в крайнее верхнее положение срабатывают приводы 16, поворачивая подхватные лапы 14 на 90 и подводя их под лист 17 Затем грузовая подвеска 7 опускается вместе с траверсой 9 до укладки листа 17 на лапы 14 и захваты 10 и привод А п.одъ- ема отключаются Кран перемещает лист 17, лежащр-ш на лапах 14 механических захватов.и поджатьш к ним траверсой 9; в зону обработки технологического оборудования, В момент останова крана силы инерции восприрлмаются жестко закрепленными ка мосговой балке 3 ма- xaHH4ecKHN H захватами, что исключает раскачивание листа« Лист 17 при останове крана может лишь скользить в го- ризонтальной плоскости до упора в вертикальные полки подхватных лап 14. Далее включаются захваты, которые захва тьгоают лист 17, приводы 16 разворачниз-под листа,Привод 4 подъема опускаU ..
ет газовую подвеску 7 и траверсу У до укладки листа 17 на подающий рольганг технологического оборудования.
Формула изобре
тения
Кран, содержащий установленную на ходовые тележки мостовую балку,несущую грузовую подвеску с траверсой, имеющей захваты с подхватными лапами, и механизм гашения колебаний, отличающийся тем, что, с целью повышения производительности и улучшения условий труда путем уменьшения времени на гашение колебаний грузоодъемной траверсы5 механизм гашения колебаний выполнен в виде паралельных гшоскнх шарнирно-рычажкых мне гозвеннкков, в каждом из которых одна пара, рычагов шарнирно закреплена концами на мостовой .балке, а другая .выполнена в виде двуплечих рычагов, шарнирно смонтированных на грузовой подвеске, одни концы которых шарнирно соединены с рычагами, а другие шарнирно связаны между -собой планкой.
ф(г. 1
Фиг. 2
| Устройство для гашения колебаний груза | 1978 |
|
SU767008A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
