ж
3S
fj
,5 If
(Л
4i СО 00 СП СО 4
9и.г.в
1433
ек 1, рамок 6, рычагов 9 шарнирно связанных-с балками 8. Последние рычагами 11 механизма ПП подвешены на ползунах 14 механизма ВП, имеющих привод от пневмоцилиндров 15. Поперечные и продольные перемещения линеек 1 осуществляются свободными колебаниями рычагов 9 и П ШП и ПП, которые фиксируются защелками 35, 36, 48, 4 и крюками 40, 53, а освобождаются электромагнитами 46, 47, 59, Компенсаторы потерь в ГШП и ПП состоят из пружин 25, 33 и пневмоцилиндров 29, 31, которые перед сбрасыванием защелок предварительно сжимают указанные пружины, а последние в начале хода Iffln и ПП сообщают энергию качающимся элементам механизмов. Работа перекладчика автоматизирована. 4 3.п. ф-лы, 8 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный блок для изготовления деталей из штучных заготовок | 1988 |
|
SU1532159A1 |
| Грейферный механизм подачи к штампу для вязки крючковых цепей | 1980 |
|
SU984585A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| МНОГОПОЗИЦИОННЫЙ ПРЕСС | 1992 |
|
RU2013173C1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| Грейферный перекладчик к штамповочному прессу | 1983 |
|
SU1159699A1 |
| Устройство для перемещения материала | 1987 |
|
SU1447493A1 |
| Грейферная подача к штамповочному прессу | 1985 |
|
SU1299679A1 |
| Грейферное подающее устройство | 1987 |
|
SU1417976A1 |
| ГРЕЙФЕРНАЯ ПОДАЧА К ШТАМПОВОЧНОМУ ПРЕССУ | 1998 |
|
RU2146618C1 |
Изобретение относится к холодной обработке металлов давлением и может быть использовано для перемещения заготовок между рабочими позициями мпо- гопозиционного пресса. Цель - повьше- ние надежности в работе. Устройство содержит механизмы поперечного, продольного, вертикального перемещений (МШ1), (ПП) и «(ВП) соответственно, линеек 1 с захватами 2, 3, 4, 5, механизм синхронизации поперечных пере-. мещений, пружинно-пневматические компенсаторы потерь энергии в 1ШП и ПП, узлы фиксации. МПП состоит из лине- g
1
Изобретение относится к холодной обработке металлов давлением и может быть использовано дпя перемещения заготовок между рабочими позициями многопозиционного пресса.
Целью изобретения является повышение надежности работы.
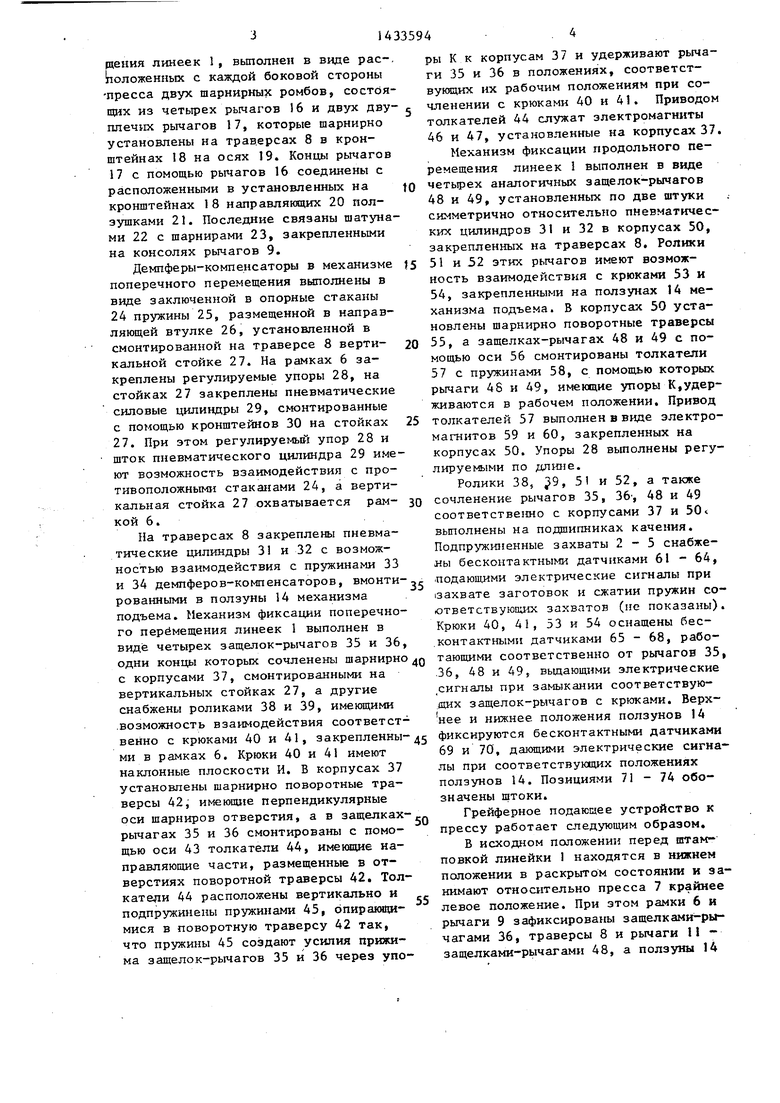
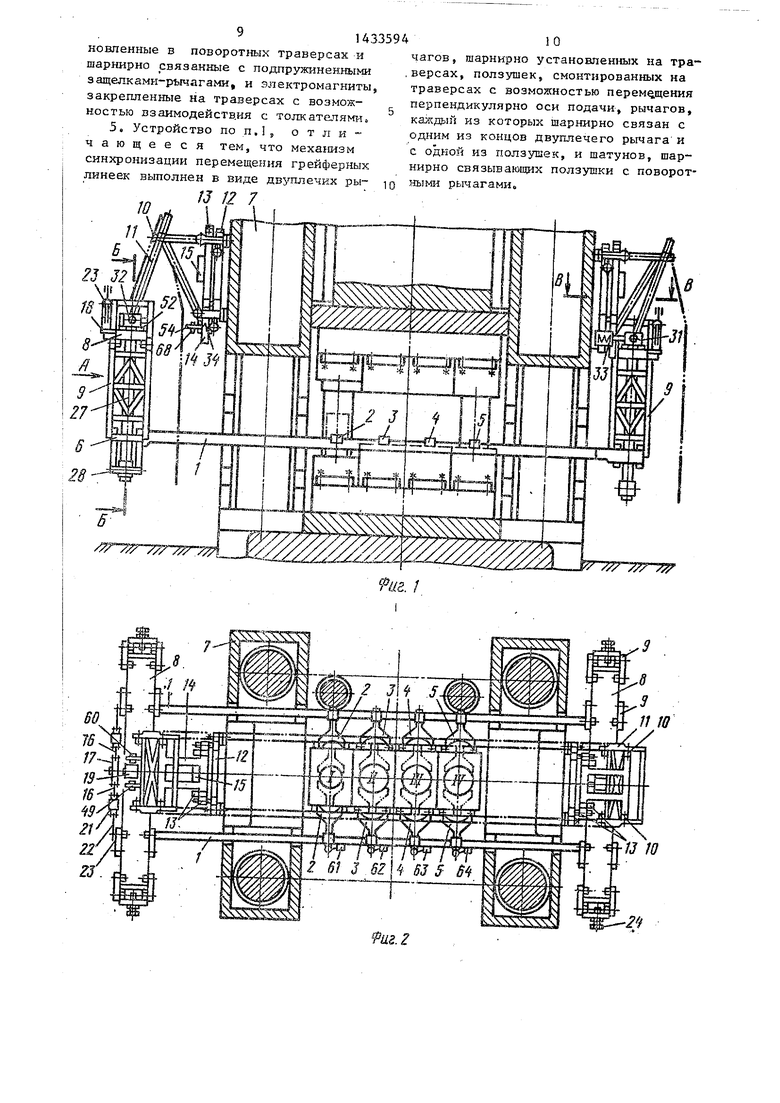
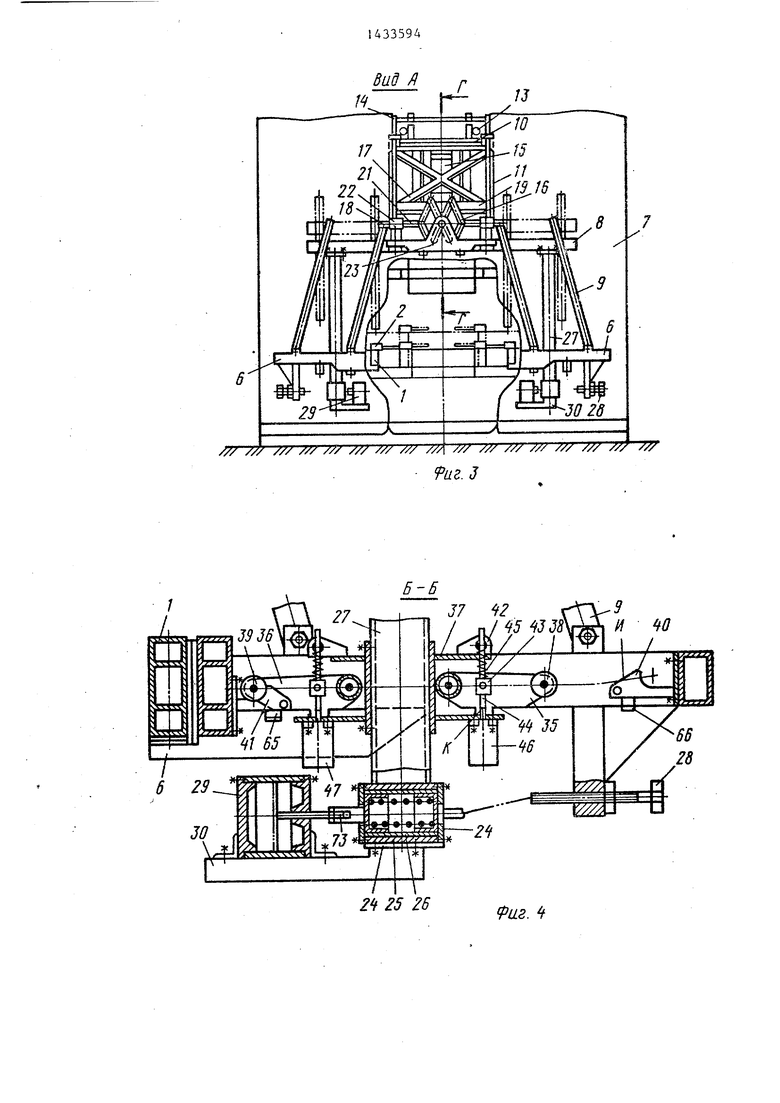
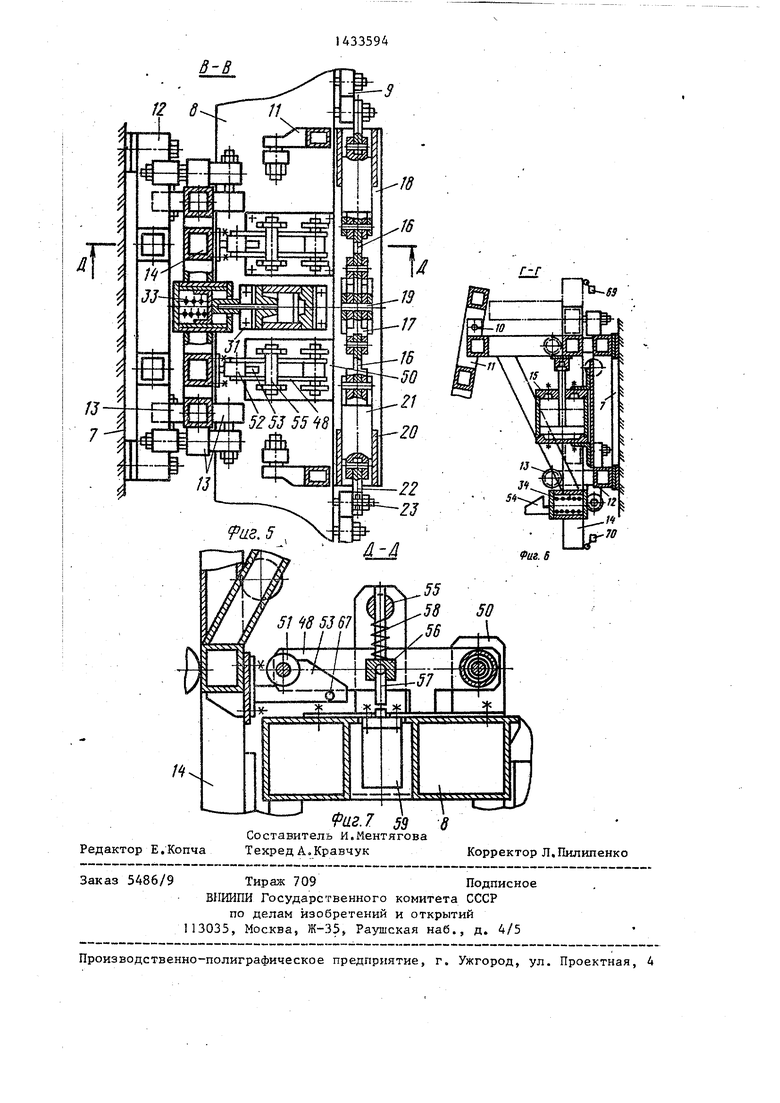
На фиг. 1 изображено грейферное подающее устройство к прессу; на фиг, 2 - то же, вид в плане; на фиг.З - вид А на фиг. 1; на фиг. 4 разрез Б-Б на фиг. 1; на фиг. 5 - разрез Б-В на фиг. I; на фиг. 6 разрез Г-Г на фиг. 3; на фиг, 7-разрез Д-Д на фиг. 5; на фиг. 8 - схема грейферного подающего устройства к прессу.
Грейферное подающее устройство к прессу содержит грейферные линейки 1 с подпружиненными захватами 2 - 3, механизм подъема, привод подъема, механизм продольного перемещения грей- ферных линеек, механизм поперечного перемещения грейферных линеек, механизм, синхронизации поперечного перемещения грейферных линеек, механизмы фиксации грейферных линеек в крайних положениях при продольном и поперечном перемещении, демпферы-компенсаторы.
Механизм поперечного перемещения линеек выполнен в виде жестко скрепленных с консолями линеек i четырех горизонтальных рамок 6, попарно размещенных справа и слева от пресса 7 На горизонтальных траверсах 8 закреплены рамки 6 двумя двухшарнирными поворотными рычагами 9 одинаковой длины, имеющими разнесенные проушины Е. Шарниры поворотных рычагов 9 выполнены на подшипниках качения. Рамки 6, рычаги 9 и траверсы 8 образуют шарнирные параллелограммы, в.которых траверсы 8 являются неподвижнвми звеньями, а рамки 6 имеют возможность качаться на рычагах 9, совершая плоскопараллельные возвратно-поступательные движения, оставаясь в горизонQ тальном положении, относительно траверс 8 и перемещая линейки 1 в поперечном направлении. При вертикальном положении рычагов 9 захваты 2-5 линеек 1 находятся в сомкнутом сос5 тоянии, а при отведенных на величину хода линейках - в разомкнутом. Механизм продольного перемещения связан с опорами 10, расположенными с боко- врй стороны пресса 7 над траверса0 ми 8, и содержит рычаги П, являющиеся тягами и имеющие разнесенные проушины Ж и одинаковые расстояния между шарнирами Ж rto длине рычага. Траверсы 8 с механизмом поперечного переме5 щения и линейками 1 благодаря рычагам 11 имеют возможность качаться с амплитудой колебания, равной ходу подачи при продольном перемещении. Механизм подъема выполнен в виде закрепленных на станине пресса 7 двух корпусов 12 (основание), в роликовых направляющих 13 которых размещены приводные ползуны 14, несущие опоры 10. Приводом ползунов 14 служат пневматические силовые ципиндры 15, закрепленные на корпусах 12 (основании) и имеющие возможность взаимодействовать с ползунами 14, несущими механизмы продольного и поперечного перемещения с линейками 1. Механизм,
0
5
0
синхронизирующий поперечные перемедения линеек 1, выполнен в виде рас положеннь Х с каждой боковой стороны пресса двух шарнирных ромбов, состоящих из четьфех рычагов 16 и двух дну- плечих рычагов 17, которые шарнирно установлены на трав.ерсах 8 в кронштейнах 18 на осях 19. Концы рычагов 17 с помощью рычагов 16 соединены с расположенными в установленных на кронштейнах 18 направляющих 20 пол- эушками 21. Последние связаны шатунами 22 с шарнирами 23, закрепленными на консолях рычагов 9.
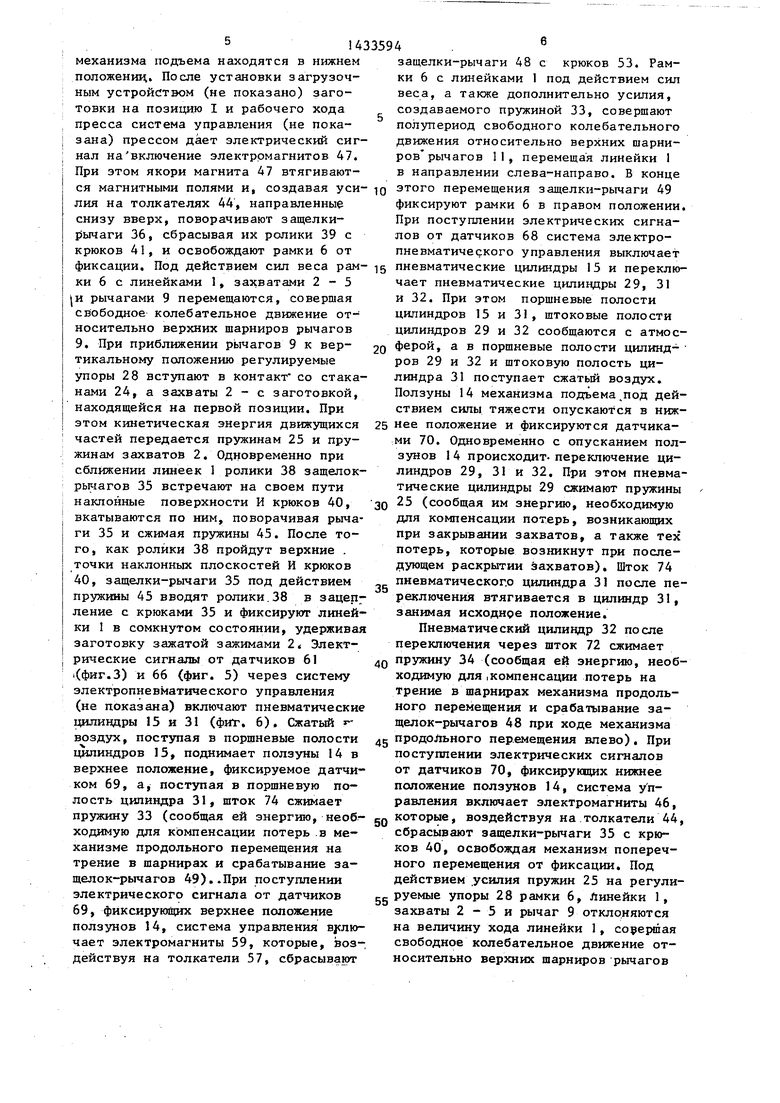
Демпферы-компенсаторы в механизме поперечного перемещения выполнены в виде заключенной в опорные стаканы 24 пружины 25, размещенной в направляющей втулке 26, установленной в смонтированной на траверсе 8 верти- калькой стойке 27. На рамках 6 закреплены регулируемые упоры 28, на стойках 27 закреплены пневматические силовые цилиндры 29, смонтированные с помощью кронштейнов 30 на стойках 27. При этом регулируемый упор 28 и шток пневматического цилиндра 29 имеют возможность взаимодействия с противоположными стаканами 24, а вертикальная стойка 27 охватывается рам- кой 6.
На траверсах 8 закреплены пневматические цилиндры 3 и 32 с возможностью взаимодействия с пружинами 33 и 34 демпферов-компенсаторов, вмонтированными в ползуны 14 механизма подъема. Механизм фиксации поперечного перемещения линеек 1 выполнен в виде четырех защелок-рычагов 35 и 36, одни концы которых сочленены шарнирно с корпусами 37, смонтированными на вертикальных стойках 27, а другие снабжены роликами 38 и 39, имеющими .возможность взаимодействия соответственно с крюками 40 и 41, закрепленными в рамках 6. Крюки 40 и 41 имеют наклонные плоскости И. В корпусах 37 установлены шарнирно поворотные траверсы 42, имеющие перпендикулярные оси шарниров отверстия, а в защелках- рычагах 35 и 36 смонтированы с помощью оси 43 толкатели 44, имеющие направляющие части, размещенные в отверстиях поворотной траверсы 42, Толкатели 44 расположены вертикально и подпружинены пружинами 45, опирающимися в поворотную траверсу 42 так, что пружины 45 создают усилия прижима защелок-рычагов 35 и 36 через упо
0
5 0 5 о
, Q д
0
5
ры К к корпусам 37 и удерживают рычаги 35 и 36 в положениях, соответствующих их рабочим положениям при сочленении с крюками 40 и 41. Приводом толкателей 44 служат электромагниты 46 и 47, установленные на корпусах 37.
Механизм фиксации продольного перемещения линеек i выполнен в виде четырех аналогичных защелок-рычагов 48 и 49, установленных по две штуки симметрично относительно пневматических цилиндров 31 и 32 в корпусах 50, закрепленных на траверсах 8. Ролики 51 и 52 этих рычагов имеют возможность взаимодействия с крюками 53 и
54,закрепленными на ползунах 14 механизма подъема. В корпусах 50 установлены шарнирно поворотные траверсы
55,а защелках-рычагах 48 и 49 с помощью оси 56 смонтированы толкатели 57 с пружинами 58, с помошзю которых рычаги 48 и 49, имеющие упоры К,удерживаются в рабочем положении. Привод толкателей 57 выполнен в виде электромагнитов 59 и 60, закрепленных на корпусах 50. Упоры 28 выполнены регулируемыми по длине.
Ролики 38, 9, 51 и 52, а также сочленение рычагов 35, 36, 48 и 49 соответстве шо с корпусами 37 и 50 выполнены на подшипниках качения. Подпружиненные захваты 2-5 снабжены бесконтактными датчиками 61 - 64, подающими электрические сигналы при 1захвате заготовок и сжатии пружин соответствующих захватов (не показаны). Крюки 40, 41, 53 и 54 оснащены бес- .контактными датчиками 65 - 68, работающими соответственно от рычагов 35, 36, 48 и 49, выдающими электрические .сигналы при замыкании соответствующих защелок-рычагов с крюками. Верх- нее и нижнее положения ползунов 14 фиксируются бесконтактными датчиками 69 и 70, дающими электрические сигналы при соответствуюсщх положениях ползунов 14. Позициями 71-74 обозначены щтоки.
Грейферное подающее устройство к прессу работает следующим образом.
В исходном положении перед штамповкой линейки 1 находятся в нижнем положении в раскрытом состоянии и занимают относительно пресса 7 крайнее левое положение. При этом рамки 6 и рычаги 9 зафиксированы защелками-рычагами 36, траверсы 8 и рычаги 11 - защелками-рычагами 48, а ползуны 14
5 1433594.
механизма подъема находятся в нижнемзащелки-рычаги 48 с крюков 53. Рам- положениц. После установки загрузоч-ки 6 с линейками 1 под действием сил ным устройством (не показано) заго-веса, а также дополнительно усилия, товки на позицию I и рабочего ходасоздаваемого пружиной 33, совершают пресса система управления (не пока-полупериод свободного колебательного зана) прессом дает электрический сиг-движения относительно верхних шарни- нал на включение электромагнитов 47.ров рычагов 11, перемещая линейки 1 При этом якори магнита 47 втягивают-в направлении слева-направо. В конце ся магнитными полями и, создавая уси-ю этого перемещения защелки-рычаги 49 ЛИЯ на толкателях 44, направленныефиксируют рамки 6 в правом положении, снизу вверх, поворачивают защелки-При поступлении электрических сигна- рычаги 36, сбрасывая их ролики 39 слов от датчиков 68 система электро- крюков 41, и освобождают рамки 6 отпневматического управления выключает фиксации. Под действием сил веса рам- 5 пневматические цилиндры 15 и переклюки 6 с линейками 1, захватами 2-5чает пневматические цилиндры 29, 31 1и рычагами 9 перемещаются, совершаяи 32. При этом поршневые полости свободное колебательное движение от-цилиндров 15 и 31, щтоковые полости носительно верхних шарниров рычаговцилиндров 29 и 32 сообщаются с атмос- 9. При приближении рь1чагов 9 к вер-20 Ферой, а в поршневые полости цилинд- тикальному положению регулируемыеров 29 и 32 к штоковую полость ци- упоры 28 вступают в контакт со стака-линдра 31 поступает сжатый воздух, нами 24, а захваты 2-е заготовкой.Ползуны 14 механизма подъема,под дей- находящейся на первой позиции. Приствием силы тяжести опускаются в ниж- этом кинетическая энергия движущихся25 нее положение и фиксируются датчика- частей передается пружинам 25 и пру-ми 70. Одновременно с опусканием пол- жинам захватов 2. Одновременно призунов 14 происходит-переключение ци- сблйжении линеек 1 ролики 38 защелок-линдров 29, 31 и 32. При этом пневма- рычагов 35 встречают на своем путитические цилиндры 29 сжимают пружины наклонные поверхности И крюков 40,зо (сообщая им энергию, необходимую вкатываются по ним, поворачивая рыча-для компенсации потерь, возникающих ги 35 и сжимая пружины 45. После то-при закрывании захватов, а также тех го, как ролики 38 пройдут верхние .потерь, которые возникнут при после- точки наклонных плоскостей И крюковдующем раскрытии захватов). Шток 74 40, защелки-рычаги 35 под действием« пневматического цилиндра 31 после пе- пруж1шы 45 вводят ролики.38 в зацепуреключения втягивается в цилиндр 31, ление с крюками 35 и фиксируют линей-занимая исходное положение. ки 1 в сомкнутом состоянии, удерживаяПневматический циливдр 32 после заготовку зажатой зажимами 2, Элект-переключения через шток 72 сжимает рические сигналы от датчиков 6140 34 (сообщая ей энергию, необ- 1(фиг.З) и 66 (фиг. 5) через системуходимую для.компенсации потерь на электропневматического управлениятрение в шарнирах механизма продоль- (не показана) включают пневматическиекого перемещения и срабатывание за- здилиндры 15 и 31 (фи, 6). Сжатый щелок-рычагов 48 при ходе механизма воздух, поступая в поршневые полости45 продольного перемещения влево). При цилиндров 15, поднимает ползуны 14 впоступлении электрических сип1алов верхнее положение, фиксируемое датчи-от датчиков 70, фиксирунщих нижнее ком 69, а, поступая в поршневую по-положение полззгнов 14, система уп- лость цилиндра 31, шток 74 сжимаетравления включает электромагниты 46, пружину 33 (сообщая ей энергию, необ-кп которые, воздействуя на толкатели 44, ходимую для компенсации потерь в ме-сбрасывают защелки-рычаги 35 с крю- ханизме продольного перемещения наков 40, освобождая механизм попереч- трение в шарнирах и срабатывание за-ного перемещения от фиксации. Под щелок-рычагов 49)..При поступлениидействием усилия пружин 25 на регули- электрического сигнала от датчиковgg руемые упоры 2В рамки 6, Линейки 1, 69, фиксирующих верхнее положениезахваты 2 - 5 и рычаг 9 отклоняются ползунов 14, система управления в слю-на величину хода линейки 1, совершая чает электромагниты 59, которые, воз-, свободное колебательное движение от- действуя на толкатели 57, сбрасывакггносительно верхних шарниров рычагов
9 и освобождая заготовку от захватов 2, установленную на второй позиции. .Раскрытое положение линейки t фиксируется датчиками 65, установленными на крюках 41. Электрические сигналы от датчиков 65 включают пресс на рабочий ход и одновременно включают г магниты 60 и переключают пневматические цилиндры. При этом одновременно происходит штамповка на второй позиции, срабатывание защелок-рычагов 49 и возврат рамок 6 в левое исходное положение, и втягивание штока в пневматических цилиндрах 29. Левое поло- is положениях при продольном и попереч- жение рамки 6 фиксируется защелками- рычагами 49, о чем в систему управления подаются электрические сигналы датчиками 67. Электрический сигнал
ном перемещениях, отличающееся тем, что, с целью повьше- ния надежности работы, оно снабжено ползунами, установленными на основаоб окончании рабочего хода, поступаю- 20 нии с возможностью перемещения в верщий из системы управления прессом, и электрические сигналы от датчиков 67 включают электромагниты 47, и цикл работы повторяется. Синхронизация симметричности поперечных перемещений линеек 1 осуществляется через ползушки 21, шатуны 22, шарниры 23 и рычаги 9.Точность перемещения линеек в продольном направлении обеспечивается рычагами 9 и 11 механизмов поперечного и продольного перемещений, имеющими разнесенные проушины. При этом траверсы 8, рычаги 9, рамки 6 с литикальном направлений, и демпферами- компенсаторами, закрепленными на траверсах и на ползунах, опоры смонтированы на ползунах,регулируемые по дпи25 не упоры установлены на грейферных линейках с возможностью взаимодейс - ВИЯ катвдого из них с одним из дем - феров-компенсаторов, закрепленным 1ч траверсе, привод поперечного перем 30 щения смонтирован на траверсе и связан с демпферами-компенсаторами, закрепленными на траверсе, привод продольного перемещения грейферных линеек смонтирован на траверсах с
нейками 1 образуют в направлении про- возможностью взаимодействия с демпфеI о5Э
дольного . перемещения линеек 1 жесткую конструкцию, перемещающуюся с помощью рычагов 11.
Формула изобретения
грейферных линеек вьтолнены в виде силовых цилиндров..
и поперечного перемещения, механизмфиксации грейферных линеек в крайних
подьема грейферных линеек, выполнен-положениях при продольном и поперечный в виде опор, связанньпс с приводом Q ном перемещениях выполнены в виде подъема, и траверс, механизм продоль- подпружиненных- защелок-рычагов, тарного перемещения грейферных линеек, выполненный в виде тяг, шарнирно связывающих траверсы с опорами и смонтированных на опорах с возможностью поворота в вертикальной плоскости, параллельной оси подачи, механизм поперечного перемещения грейферных линеек, выполненный в виДе поворотных
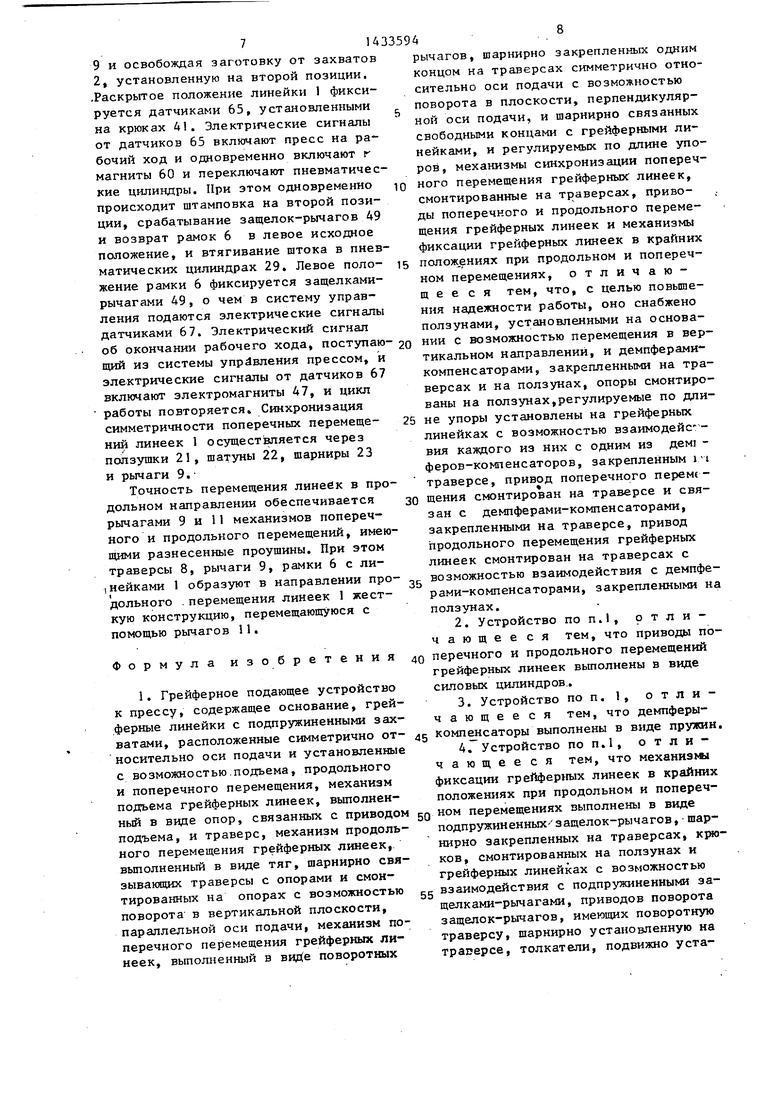
рычагов, шарнирно закрепленных одним концом на траверсах симметрично относительно оси подачи с возможностью поворота в плоскости, перпендикулярной оси подачи, и шарнирно связанных свободными концами с грейферными линейками, и регулируекЦ)1х по длине упоров, механизмы синхронизации попереч- ного перемещения грейферных: линеек, смонтированные на траверсах, приводы поперечного и продольного перемещения грейферных линеек и механизмы фиксации грейферных линеек в крайних
положениях при продольном и попереч-
ном перемещениях, отличающееся тем, что, с целью повьше- ния надежности работы, оно снабжено ползунами, установленными на основатикальном направлений, и демпферами- компенсаторами, закрепленными на траверсах и на ползунах, опоры смонтированы на ползунах,регулируемые по дпи25 не упоры установлены на грейферных линейках с возможностью взаимодейс - ВИЯ катвдого из них с одним из дем - феров-компенсаторов, закрепленным 1ч траверсе, привод поперечного перем 30 щения смонтирован на траверсе и связан с демпферами-компенсаторами, закрепленными на траверсе, привод продольного перемещения грейферных линеек смонтирован на траверсах с
рами-компенсаторами, закрепленными на ползунах.
грейферных линеек вьтолнены в виде силовых цилиндров..
новленные в поворотных траверсах и шарнирно связанные с подпружиненными защелками-рычагами, и электромагниты, закрепленные на траверсах с возможностью взаимодейств.ия с толкат У1яьш 5. Устройство по n.l; отличающееся тем, что механизм синхронизации перемещения грейферных линеек выполнен в виде двуплечих ры10
чагов, шарнирно установленных на траверсах, ползушек, смонтированных на траверсах с возможностью перемодаения перпендикулярно оси подачи, рычагов, каждый из которых шарнирно связан с одним из концов двуплечего рычага и с одной из ползушек, и шатунов, шарнирно связывающих ползушки с поворотными рычагами.
2ff
/// /// Х /// /// /// /// /// //л У/ /- /7/ // /// // //7
8ид и
9аг.З
2 25 26
Риг.
/4
Редактор Е.Копча
г.7 59 в
Составитель И.Ментягова
Техред А. КравчукКорректор Л. Пилипенко
ss
| Грейферный перекладчик к штамповочному прессу | 1983 |
|
SU1159699A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Грейферная подача к штамповочному прессу | 1985 |
|
SU1299679A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
