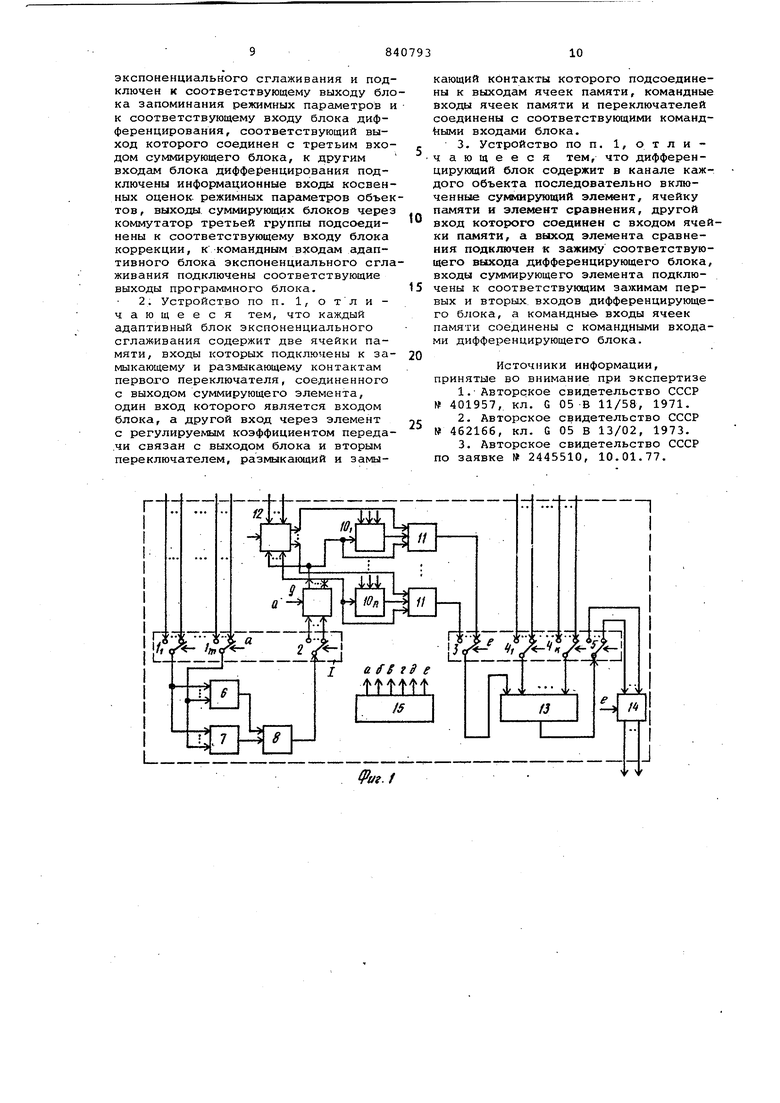
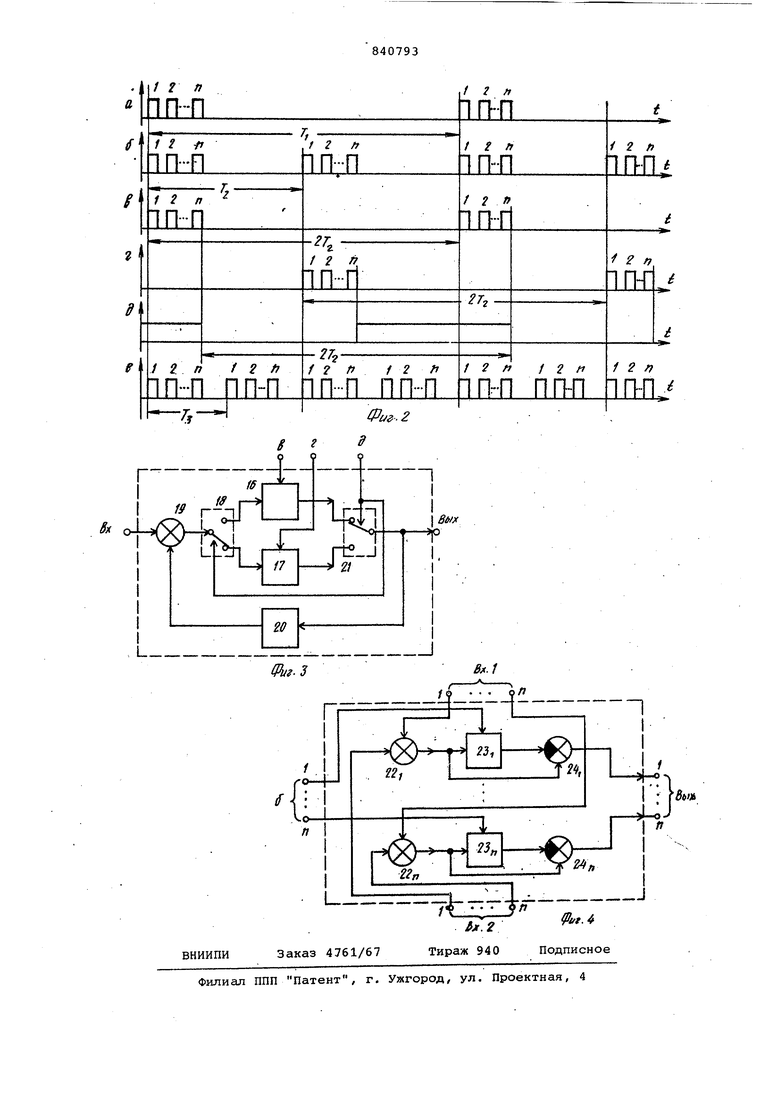
1 Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического управления инерционными технологическими процессами, осуществляемыми в нескольких параллельно работающих однотипных аппаратах, например алкилаторах. Известно многоканальное/устройство управления, содержащее в каждом канале блок сравнения, дискретный (шаговый) интегратор и регулятор, а также общие для. всех каналов коммутатор и блок вычисления заданных значений. Блок сравнения в каждом канале по под ключенным к нему коммутаторам сигнала задания и переменной выдает управляющие импульсы, воспринимаемые шаговым интегратором, выходной сигнал которого является заданием локальному регулятору. Устройство управления реализует U-закон регулирования, что не всегда достаточно для качественного управления инерционными объектами и имеет недостаточные функционалыше возможности ДЛЯ осуществления более сложных функций управления 11J Известен автоматический оптимизатор группы объектов, который оптими зирует общий показатель с учетом характеристик работы отдельных объектов 12. Однако для управления объектами .с существенными динамическими параметрами (инерционность, запаздывание) , а также для учета особенностей отдельных объектов его функциональные возможности оказываются недостаточными. Наиболее близкой по технической сущности является система управления процессом алкилирования бензола олефинами, которая содержит устройство управления несколькими объектами с инерцией, включакнцее блок ввода-запоминания состава алкилата, блоки определения текущего и оптимального значений режимных параметров-, блок дифференцирования, блок формирования режимных параметров, блок коррекции по различным параметрам, блоки запоминания режимных параметров и требуемых расходов бензола, коммутаторы каналов объектов, осуществляющие связи с датчиками и между отдельными блоками -JS. . Недостатками системы являются низкое качество Управления и сложность блоков ввода данных о режимных параметрах. Цель иэобретения - повышение качества управления. Поставленная цель достигается тем что в устройство управления несколькими однотипными объектами с инерцией , содержащее четыре группы комму таторов, блоки определения текущего и оптимальногозначений режимных параметров объектов, входы которых объединены и подключены к выходам соответствующих коммутаторов первой группы, подключенных входами к информационным линиям инерционных режимных параметров объектов, к выходам блоков определения текущего и оп тимального значений режимных параметров объектов подключен блок форми рования режимных параметров объекта, выход которого через вторую группу коммутаторов подключен-к входам блока запоминания режимных параметров объектов, блок коррекции, к вхрдам которого через коммутаторы третьей группы подключены информационные вхо ды измеряемых возмущений, а его выход через коммутатор четвертой группы соединен с входами блока запомина ния управлений, выходы которого являются выходами устройства, программ ный блок, выход которого подсоединены к соответствующим командным входам всех групп коммутаторов, блока запоминания режимных парс1метров и блока дифференцирования, в канал каж дого объекта последовательно включен адаптивный блок экспоненциального сглаживания и суммирующий блок, второй вход которого соединен с входом адаптивного блока экспоненциального сглаживания и подключен к соответствующему выходу блока запоминания режимных параметров и к соответствующему входу блока дифференцирования, соответствующий выход которого соеди нен с третьим входом суммирующего бл ка, к другим входам блока дифференци рования подключены информационные входы косвенных оценок режимных пара метров объектов, выходы суммирующих блоков через коммутатор третьей груп пы подсоединены к входу блока коррекции, к командным входам адаптивно го блока экспоненциального сглаживания подключены соответствующие выход программного блока. Каждый адаптивный блок экспоненциального сглаживания содержит две ячейки памяти, входы которых подключены к замыкающему и размыкакмцему контактам первого переключателя, сое диненного с выходом суммирукицего эле мента, один вход которого является входом блока, а другой вход через эл мент с регулируемым коэффициентом пе редачи связан с выходом блока и вторым переключателем, размыкагадий и за мыкающий контакты которого подсоединены к выходам ячеек памяти, командные входы ячеек памяти и переключате лей соединены с соответствующими командными входами блока. Кроме того, дифференцирующий блок содержит в канале каждого объекта последовательно включенные суммирующий элемент, ячейку памяти и элемент сравнения, другой вход которого соединен с входом ячейки памяти, а выход элемента сравнения подключен к зажиму соответствующего выхода дифференцирующего блока, входы суммирующего элемента подключены к соответствующим зажимам первых и вторых входов дифференцирующего блока, а командные входы ячеек памяти соединены с командными входами дифференцирующего блока. На фиг. 1 представлена структурная схема устройства управления несколькими однотипными объектами с Инерцией на фиг. 2 - временная диаг-. рамма его работы; на фиг. 3 - структурная схема адаптивного блока экспоненциального сглаживания; на фиг.4структурная схема блока дифференцирования. Устройство управления несколькими однотипными объектами с инерцией содержит четыре группы коммутаторов (I группа - коммутаторы 1 - 1, II группа - коммутатор 2, III группа - коммутаторы 3 и , IV группа - коммутатор 5), блоки 6 и 7 определения текущего и оптимального значений режимных параметров объектов, блок 8 формирования режимных параметров объектов, блок 9 запоминания режимных параметров объектов, адаптивные блоки 10 10ц экспоненциального сглаживания, суммирующие блоки 1Ц блок 12 дифференцирования, блок.13 коррекции, блок 14 запоминания управлений, программный блок 15. Каждый адаптивный блок экспоненциального сглаживания содержит две ячейки 16, 17 памяти, входы которых подключены к замыкающему и размыкающему контактам первого переключателя 18, соединенного с выходом суммирующего элемента 19, один вход которого является входом блока, а его другой вход через элемент 20 с регулируемым коэффициентом передачи соединен с выходом блока и вторым переключателем 21, размыкающий и замыкаю1ций контакты которого соединены с выходами ячеек 16, 17 памяти. Дифференцирующий блок 12 содержит в канале каждого объекта последовательно включенные суммирующий элемент 22, ячейку 23 памяти и элемент . 24 сравнения, другой вход которого соединен со входом ячейки 23 памяти, а его выход подключен к зажиму соответствующего данному объекту выхода блока. Входы суммирующего элемента 22 в канале каждого объекта подключены к соответствующим данному объекту первому и второму входам блока, а ко мандные входы ячеек 234-23 памяти подсоединены к командным входам блока дифференцирования. Устройство управления работает сл дующим образом. Очередность обслуживания п однотипных объектов и цикличность опроса информационных входов устройства определяется программн 1м блоком 15, уп рощенная временная диаграмма работы которогр представлена на фиг. 2. По командам а программного блока 15 последовательно для кахдото из п объектов коммутаторы подключают информационные линии инерционных режимнцх параметров объекта к входам блоков б и 7 определения те кущего и оптимального значений режим ных параметров. На основе этих значений в блоке 8 формируется отклонение режимного параметра по данному объекту и через коммутатор 2 подключается для записи (по той же команде а) к соответствующей ячейке памяти блока 9 запоминания режимных параметров. Значение. (высокий уровень) команды а по каждому из п объектов (см.- фиг. 2) соответствует подключению каналов данного объекта на входы или выходы соответствующих блоков 6-8 и установлению режима Запись в соответствующей данному объекту ячейке памяти блока 9, а зна чение О (низкий уровень) команды а соответствует отключению каналов объектов от блоков и режиму Считывание в ячейках памяти. Таким образом/ после обслуживания по командам а последнего (п-го) объекта в ячейках памяти блока 9 записываются новые значения режимных параметров объёктов, которые используются для выработки управлений на объекты. Цикл ввода данных (период Т) определяется дискретностью получения информации об инерционных режимных параметрах объектов. Для процесса алкилирования этот период составляет Т 2 ч. Ячейки памяти блока 9 запоминания режимных параметров объектов (а также других запоминающих блоков устройства управления) обеспечивают полезный выходной сигна не только в режиме Считывание, но и в режиме Запись. Команды а вырабатываются в блоке 15 по жесткой программе, сигнализируя оператору онеобходимости ввода данных о режимных параметрах объектов. В другом случае эти комаац и вырабатываются в программном блоке 15 по сигналам оператора при вводе им очередных данных состава алкилата пр этом циклы Tlj и Т2 могут быть несинхронизированы. В блоке 12 дифференцирования по командам б программного блока 15 последовательно для каждого из п j объектов в начале каждого цикла с периодом Т (обычно значительно меньше Т - в устройстве управления несколькими алкилаторами Т 34 мин-) осуществляется запись (при б 1) в каждой из п ячеек 23, 23(i памяти блока суммы 2-х сигналов - режимного параметра объекта (с соответствующего выхода блока 9) и его косвенной оценки (с соответствующего информационного входа устройства). Сразу после записи этих сигналов в ячейку памяти данного объекта сигнал на соответствующем выходе блока равен нулю, так кач на элемент 24 сравнения поступают равные сигналы. Однако в дальнейшем при изменении входных сигналов блока (в первую очередь, косвенной оценки режимного параметра температуры в зоне реакции алкилатора) выходной сигнал также изменяется и представляет собой текущее значение (т.е. значение в данный момент t на интервале О - Т) первой разности входных сигналов блока. Таким образом, любые отклонения входных сигналов от их зафиксированных в начале цикла в ячейке 23 памяти значений сразу приводят к изменению соответствующего выходного сигнала блока, используемого дли выработки управления по данному объекту. При этом в устройстве управления несколькими алкилаторами учитываются резкие выбросы температуры в зоне реакции алкилаторов, что является его важным преимуществом по сравнению с известными устройствами. Одновременно в блоке 12 дифференцирования вырабатывает-, ся сигнал коррекции по производной (первой разности) состава алкилата, что позволяет повысить -качество управления в переходных режимах. Сигналы с выходов блока 9 запоминания режимных параметров и дифференцирующего блока 12 поступают на входы соохветствукицих суммирующих блоков . Эти сигналы являются пропорциональными и дифференциальными составлякяцими закона формирования управлений на объекты. Кроме этого, на входы суммирующих блоков поступают сигналы с выходов адаптивных блоков э.кспоненциального сглаживания , эквивалентные интегральной составляющей закона формирования управлений на объекты. Однако в отличие от обычного ингёгратора (дискретного или непрерывного) в этих блоках происходит забывание предьщущих значений входньГх сигналов (отклонений режимных параметров от оптимальных значений) в соответствии с адаптивным алгоритмом экспоненциального срлаживания. Это позволяет фильтровать .ошибки измерения состава алкилата, определяющего, режимные параметры объектов в устройстве управления несколькими алкилаторами с инерцией, обеспечивая высокре качество уравления в стационарных и переходных режимах, а также при изменении или йеидентичности характеристик отдельHfcjjx алкилаторов.
Реализация адаптивных алгоритмов экспоненциального сглаживания в блоках 10 10и осуществляется по командам в, г и д программного блока 15 (фиг. 2). Команда д (общая для всех блоков ) определяет положение переключателей блока (при д О закорочены размыкающие контакты, а при д 1 - замыкающие), а команды виг управляют режимами Запись (при в 1 или г 1) и Считывание (при в О или г 0) соответственно первой и второй ячейки памяти в адаптивном блоке данного объекта.
В момент записи информации, например в первую ячейку 16 блока 10 (при этом команды на его входах , ), на ее вход через замкнутый замыкающий контакт первого переключателя 18 с выхода суммирующего элемента 19 подается сумма входного сигнала блока и взвешенного значения его выходного сигнала, т.е. содержимого второй ячейки 17 памяти, выходной сигнал которой через замкнутый замыкающий контакт (д 1) второго переключателя 21 и элемент 20 с регулируемым коэффициентом передачи, определяющим вес предьщущих значений в адаптивном алгоритме экспоненциального сглаживания, подается на суммирующий элемент 19. Таким образом, в очередном полуцикле (при д 0) на выходе этого блока появляется выходной сигнал цервой ячейки 16, представляющий собой сумму последнего и всех предыдущих отклонени режимного параметра данного объекта от его оптимального значения, причем вес предыдущих значений убывает (при коэффициенте передачи регулируемого элемента блока, меньшем единицы) по мере их удаления от текущего момента времени. Отклонение, записанное в одну из ячеек этого блока, десять шагов (полуциклов) назад при коэффициенте передачи регулируемого элемента, равным О,9, учитывается в сумме на текущем шаге с весом 0, - 0,38. В начале очередного полуцикла при д О, в О и г 1 запись производится во вторую ячейку 17 памяти блока 10 и так далее. Циклы записи в каждОй из ячеек памяти блока повторяются с периодом 2 Та выходной сигнал блока изменяется два раза за этот период, т.е. один раз в полуцикл, равный Т. Аналогично работают и остальные блоки .
Выходные сигналы суммируняцих блоКОБ 11 -11, периодически по командам е 1 подключаются коммутатором 3 третьей группы к одному из входов бл
ка 13 коррекции. На другие входы этого блока по тем же командам е 1 коммутаторы 4 -4к подключаю-т информационные входы измеряемых возмущений На основе этих данных в блоке 13 коррекции определяются требуемые значения управлений на объекты, которые по. тем же командам е 1 подключаются коммутатором 5 на входы блока 14 запоминания управлений. Выходные сигналы этого блока, остающиеся постоянными при е О до следующего цикла записи, являются заданиями локальных регуляторов отработки управляющих воздействий на объекты, например расходов бензола на алкилаторы.
Применение предлагаемого устройства позволяет увеличить качество управления.путем учета при формировании управлений по каждому объекту информации об отклонениях режимных параметров от оптимальных значений, накопленной на предыдущих шагах управления по данному объекту, и текущего значения первой разности сигналов о режимных параметрах и их оценках.
Формула изобретения
1. Устройство управления несколькими однотипными объектами с инерцией, содержащее четыре группы коммутаторов, блоки определения текущего и оптимального значений режимных параметров объектов, входьг которых объединены и подключены к выходам соответствующих коммутаторов первой группы, входы которых подсоединены к информационным линиям инерциойных режимных параметров объектов к выходам блоков определения текущего и оптимального значений режимных параметров объектов подключен блок формирования режимных параметро объекта, выход которого через вторую группу коммутаторов подключен к входам блока запоминания режимных параметров объектов, блок коррекции, к входам которого через коммутаторы третьей группы подключены информационые входы измеряемых возмущений, а его выход через коммутатор четвертой группы соединен с входами блока запоминания управлений, выходы которог являются выходами устройства, программный блок, выходы которого подсоединены к соответствующим командным входам всех групп коммутаторов, блока запоминания режимных парметров и блока дефференцирования, отличающееся тем, что, с целью повышения качества управления, в канал каяздого объекта последовательно включены адаптивный блок экспоненциального сглаживания и суммирующий блок, второй вход которого соединен с входом адаптивного блока
экспоненциального сглаживания и подключен к соответствующему выходу блока запоминания режимных параметров и к соответствующему входу блока дифференцирования, соответствующий выход которого соединен с третьим входом суммирующего блока, к другим входам блока дифференцирования подключены информационные входы косвенных оценок- режимных параметров объектов , выходы, суммирующих блоков через коммутатор третьей группы подсоединены к соответствующему входу блока коррекции, к командным входам адаптивного блока экспоненциального сглаживания подключены соответствующие выходы программного блока.
2. Устройство поп. 1, отличающееся тем, что каждый адаптивный блок экспоненциального сглаживания содержит две ячейки памяти, входы которых подключены к замыкающему и размыкающему контактам первого переключателя, соединенного с выходом суммирующего элемента, один вход которого является входом блока, а другой вход через элемент с регулируемым коэффициентом переда.чи связан с выходом блока и вторым переключателем, размыкающий и замыh-h
Г
12
кающий контакты которого подсоединены к выходам ячеек памяти, командные входы ячеек памяти и переключателей соединены с соответствующими команд 1ыми входами блока.
3. Устройство по п. 1, о т л и чающееся тем, что дифференцирующий блок содержит в канале каждого объекта последовательно включенные cy ввlpv oщий элемент, ячейку памяти и элемент сравнения, другой
o вход которого соединен с входом ячейки пгиняти, а выход элемента сравнения подключен к зажнму соответствующего выхода дифференцирующего блока, входы суммирующего элемента подклю5чены к соответствующим зажимгии первых и вторых входов дифференцирующего блока, а командные, входы ячеек памяти соединены с командными входами дифференцирующего блока.
0
Источники информации, принятые во внимание при экспертизе
1.-Авторское свидетельство СССР № 401957, кл. G 05 В 11/58, 1971.
2.Авторское свидетельство СССР
5 №462166, кл. G 05 В 13/02, 1973.
3.Авторское свидетельство СССР по заявке 2445510, 10.01.77.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференцирующее устройство | 1982 |
|
SU1051547A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ КОЛЕБАНИЙ | 1991 |
|
RU2024912C1 |
| Глубинное устройство для цифровой записи параметров траектории скважины | 1980 |
|
SU903565A1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2450343C1 |
| ОДНОРОДНАЯ ВЫЧИСЛИТЕЛЬНАЯ СРЕДА С ДВУСЛОЙНОЙ ПРОГРАММИРУЕМОЙ СТРУКТУРОЙ | 1998 |
|
RU2134448C1 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1260916A1 |
| Устройство для контроля цифровых объектов | 1983 |
|
SU1160373A1 |
| Способ автоматического регулирования процесса алкилирования бензола олефинами | 1977 |
|
SU717018A1 |
| Дифференцирующе-сглаживающее устройство | 1975 |
|
SU610115A1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2449350C1 |
2 V
I
5V
