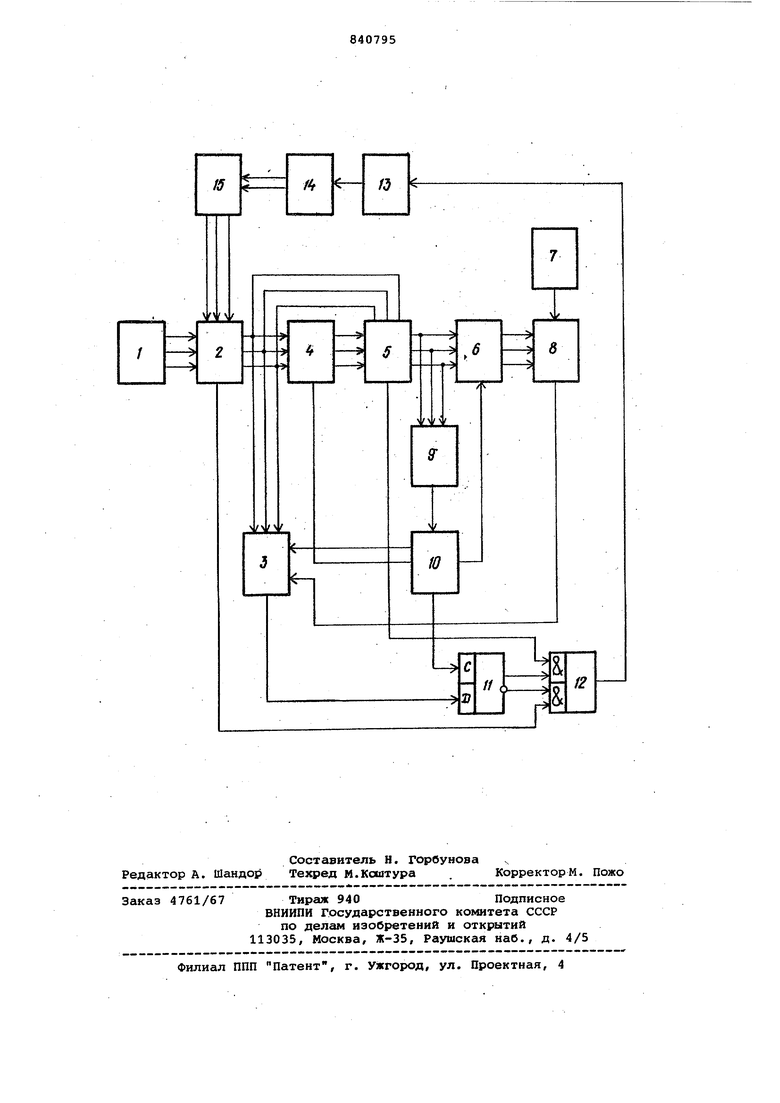
Изобретение относится к информационно-измерите.пьной технике и предназначено для использования в информ ционно-измерительны системах в качестве регистрирующего, а в системах автоматического управления в качеств управляющего и регулирующего устройства. Известна цифровая следящая система, содержащая поразрядное кодовое сравнивающее устройство, сравнивающе коды приемного регистра и преобразователя угол-код и дающее информацию о разности через триггер запоминания знака разности кодов и триггер запуска на усилитель и двигатель, с валом которого связан тахогенератор, служащий вместе с усилителем постоян ного тока для введения скоростной обратной связи. Сигнгш управления скоростью отработки вырабатывается триггером управления, подключающим обратную связь по скорости через ключ. Устройство управления логикой работы системы сотоит из генератора импульсов и распределения l. Недостатками данной системы являются сложность, обусловленная наличием поразрядного, разнесенного во времени устройства сравнения кодов, тахогенератора, усилителя тока и системы управления подключения обратной связи по- скорости в зависимости от величины ра,ссогласования; низкие динамические характеристики, обусловленные дополнительным моментом инерции на валу двигателя, вносимом тахогенератором, низкая точность, обусловленная наличием усилителя постоянноро тока, построенного по схеме с непосредственными связями, которые можно заменить МДМ усилителем, при этом ухудшаются динамические характеристики системы; низкая метрологическая надежность, связанная с использова- нием распределения последовательного типа в устройстве сравнения кодов и триггеров знака, сильно подверженных влиянию импульсньис помех. Наиболее близким к предлагаемой по технической сущности является цифровая следящая система, содержащая последовательно соединенные входной регистр, кодовое сравнивающее устройство, преобразователь код-длительность импульса, выходом соединенного с информационным входом D-триггера, выход которого и выход знака кодового сравнивающего устройства соедине.ны со входами сумматора по модулю два, выход которого подключен ко BXO ду блока управления, выходом соединенного с обмоткой управления двигателя, вал которого кинематически свя зан с преобразователем перемещениекод, разрядные выходы которого соеди нены со входами кодового сравнивающего устройства, а выход младшего разряда соединен также с тактовым входом преобразователя код-длительность импульса и с тактовым входом О-триггера :2. Однако в известном устройстве невозможно устранение динамической погрешности при линейной скорости изменения входного кода во время отработки рассогласования входного и ком пенсирующего кодов, что ограничивает также область его использования. Цель изобретения - повышение динамической точности системы. Поставленная цель достигается тем что в цифровую следящую систему, содержащую блок управления, соединенны выходом через двигатель со входом преобразователя аналог-код, вых( которого подключены к первым входам первого блока сравнения, подсоединен ного вторыми входами к выходам регистра, а первыми выходами - к первым входам преобразователя код-временной интервал, выход которого подключен к первому входу триггера, вве дены генератор импульсов, элемент И-ИЛИ и последовательно включенные первый буферный блок памяти, второй блок сравнения, элемент ИЛИ, формиро ватель команд, второй буферный блок памяти и умножитель частоты, соединенный вторым входом с выходом генератора импульсов, а выходом - со вторым входом преобразователя кодвременной интервал, третий вход которого подключен ко второму выходу формирователя команд, подсоединенного третьим выходом ко второму вход первого буферного блока памяти, а четвертым выходом - ко второму входу триггера, соединенного соответственно прямым и инверсным выходами с пер вым и вторым входами элемента И-ИЛИ, подключенного третьим входом ко второму выходу первого блока сравнения, выходом.- ко входу блока управления, а четвертым входом - ко второму выходу второго блока сравнения, соединенного вторыми входами с первыми выходами первого блока сравнения, а первыми выходами - со вторыми входами второго буферного блока памяти. На чертеже приведена схема устрой ства. Цифровая следящая система включае в себя регистр 1, первый блок 2 срав нения преобразователь 3 код-временной интервал, первый буферный блок 4 памяти, второй блок 5 сравнения, вто рой буферный блок 6 памяти, генератор 7 импульсов, умножитель 8 частоты, элемент ИЛИ 9, формирователь 10 команд, триггер 11, элемент И-ИЛИ 12, блок 13 управления, двигатель 14, преобразователь 15 аналог-код. Система работает следующим образом. При возникновении рассогласования входного и компенсирующего кодов и при линейной скорости изменения входного кода, преобразователь Зу тактируемый импульсами, частота следования которых с умножителя 8 частоты превышает опорную частоту с генератора 7 в число раз, соответствующее коду скорости изменения входного кода, формирует импульс длительности, который соответствует такой скорости движения динамической части системы, при которой с предыдущего рассогласования торможением можно привести систему в нулевое рассогласование с нулевой относительной скоростью, которая определяется как разность скоростейкаретки с изменения входного кода. Код рассогласования входного и компенсирующего кодов .образующийся на выходе первого сравнивающего блока 2, поступает на вход первого буферного блока 4 памяти, на вход преобразователя 3 код-временной интервал и на соответствующие входы второго блока 5 сравнения, и при наличии не нулевого кода разности на выходе второго блока 5 сравнения на выходе элемента ИЛИ 9 появляется сигнал, запускающий формирователь 10 команд, который в первом такте своей работы формирует сигнал записи, поступающий на вторсрй вход триггера 11. На выход триггера 11 переписывается логический О, поступающий с выхода преобразователя 3 код-временной интервал, если длительность этого импульса больше чем длительность изменения младшего разряда кода с преобразователя 15 аналог-код и, следова-тельно, скорость движения динамической части выше, чем допустимо, и момент на Всшу должен влиять на кинетическую схему согласно знаку рассогласования. Бели же длительность формируемого импульса больше, то переписывается 1 и включается реверс двигателя. Во втором также формирователь 10 ко,манд формирует сигнал записи кода скорости изменения входного кода во второй буферный блок б памяти. Этот код является множителем опорной частоты с генератора импульсов. В этом же такте формирователь 10 команд вновь запускает прео.бразователь код-временной интерваш 3, после чего формирует сигнал записи кода, рассогласования входного и компенсирующего кодов в первый буферный блок , 4 памяти. Используя сигналы с прямого и инверсного выходов триггера 11 и сигналы знака разности обоих сравнивгцощих устройств элемент И-ИЛИ 12 формирует сигнал, поступающий на вход управления реверсом двигателя блока управления. Такое построение устройства дает возможность существенно снизить дин мические погрешности, регистрации, ч позволяет использовать регистры на основе данной систелвл в хроматографической аппаратуре, где величина п грешности - наиболее важный показатель . В экспериментальных образ;цах получено снижение динамической по-, грешности на синусоидальном входном воздействии 2 Гц до единицы младшего разряда маски (0,1%) с 3,2% у из вестного при существенно меньшей ве личине пиков. Формула изобретения Цифровая следящая система, содер жащая блок управления, соединенный выходом через двигатель со входом преобразователя аналог-код, выходы которого подключены к первым входам первого блока сравнения, подсоеди-ненного вторыми входами к выходам регистра, а первыми выходами - к пе вым входам преобразователя код-временной интервал выход которого под ключен к первому входу триггера, отличающаяся тем, чтоj с целью повышения динамической точности системы в нее введены генератор импульсов, элемент И-ИЛИ и последовательно включенные первый буферный блок памяти, второй блок сравнения, элемент ИЛИ, формирователь команд, второй буферный блок памяти и умножитель частоты, соединенный вторым входом с выходом генератора импульсов , а выходом - со вторым входом преобразователя код-временной интервал, третий вход Которого подключен ко второму выходу формирователя команд, подсоединенного третьим выходом ко второму входу первого буферного блока памяти, а четвертым выходом - ко второму входу триггера, соединенного соответственно прямым и инверсным выходами с первым и вторым входс1ми элемента И-ИЛИ, пбдключенного третьим входом ко второму выходу первого блока сравнения, выходом - ко входу блока управления, а четвертым входом - ко второму выходу второго блока сравнения, соединенного вторыми входами с первыми выходами первого блока сравнения, а первыми выходами - со вторыми входами второго буферного блока памяти. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 541143, кл. G 05 В 11/23, 1976. 2.Авторское свидетельство СССР по заявке 2688045/18-24, кл. G 05 В 11/26, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1990 |
|
SU1833835A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Цифровая следящая система | 1990 |
|
SU1835533A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Система программного управления | 1979 |
|
SU817669A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| Цифровая следящая система | 1979 |
|
SU868700A1 |
| Цифровая следящая система | 1977 |
|
SU682872A1 |
| СЛЕДЯЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1989 |
|
RU2028731C1 |
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |