1
Изобретение относится к автоматике и вычислительной технике и предназначено для использования, например, при построении двух координатных регистраторов.
Известная цифровая следящая система 1 не обладает достаточной надежностью и аппаратурной простотой, так как для своего функционирования она использует вспомогательные управляющие сигналы, для выработки которых используются ряд дополнительных блоков, осуществлякядих ряд математических преобразователей.
Наиболее близкой к предлагаемой является цифровая следящая система, содержащая генератор импульсов, первый и второй триггеры и включенные последовательно исполнительный блок и двигатель, кинематически связанный со входом преобразователя Угол-код 2.
Недостатки указанной системы состоят в значительной сложности схемы, наличие в которой усилителя постоянного тока и электромеханического та- хогенератора предопределяет низкую надежность системы, а также в том, что связь подвижного обратного преобразователя Перемещение-код
с устройством поразрядного сравнения осуществляется гибкими проводниками, число которых равно разрядности обратного преобразователя и в случае систем высокой точности представляет собой значительную величину.
Цель изобретения - повышение надежности и упрощение системы.
Поставленная цель достигается тем, что в цифровую следящую систему, содержащую генератор импульсов, первый и второй триггеры и включенные последовательно исполнительный блок и двигатель, кинематически связанный
15 со входом преобразователя Угол-код, введены мультиплексоры, суммато хл, третий триггер и адресный блок, подключенный выходами к первым входам мультиплексоров, первым входом - к выходу.генератора импульсов, а вторым входом-к первым входам второго и третьего триггеров и выходу младроего разряда преобразователя Угол-код, соединенного выходами со вторыми входами первого мультиплексора, выход которого подключен к первым входам первого сумматора и первого триггера, соединенных вторыми входами с выходом второго мультиплексора, подключенного вторыми входами к выходам
регистра, а третий вход первого триг гера соединен с выходом первого сумматора и вторым входом второго триггера, подключенного выходом ко второму входу третьего триггера, выход которого и выход первого триггера соединены через второй сумматор со входом исполнительного блока.
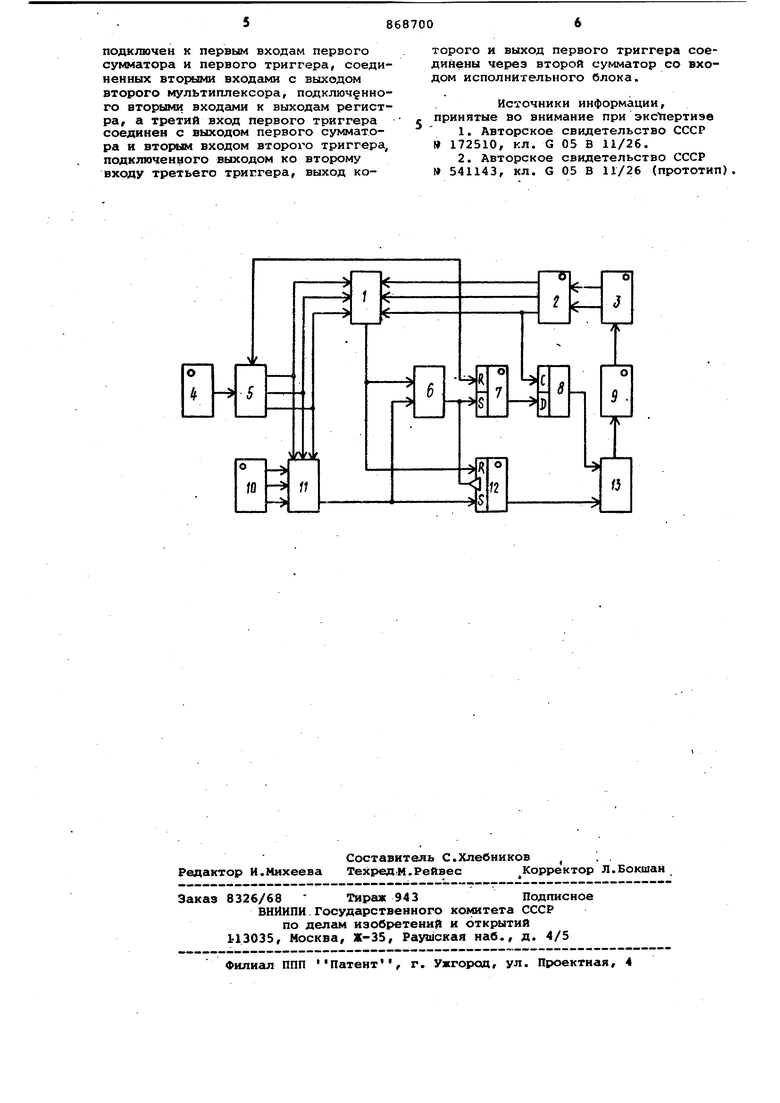
На чертеже показана функциональная схема . цифровой следяще й системы (цсс;,
Система содержит мультиплексор If преобразователь 2 Угол-код, двигатель 3, генератор 4 импульсов, адресный.блок (формирователь адреса мyJ ьтиплeкcopoв) 5, сумматор б по модулю два, триггер 7 управления, D TpHrrep 8, исполнительный блок (блок управления двигателем) 9, регистр 10, мультиплексор II, триггер 12 зн,ака, сумматор 13 по модулю два.
Система работает следующим образом.
Код, подлежащий обработкеj поступает со входного регистра 10 на информационный вход мультиплексора 11. Код наложения каретки ЦСС с преобразователя 2 Угол-код подается на информационный вход мультиплексора 1. Сравнение разрядов осуществляется первым сумматором б по модулю два на входы которого поступают сигналы с выходов мультиплексоров. Триггер 12 знака на основе сигналов с выходов мультиплексоров 1 и 11 и сумматора 6, по модулю два формирует сиг.Haji знака разности сравнивае; аах разрядов кодов.
Порядок и моменты времени изменения ноглеров сравниваемых разрядов опрелеляются формирователем 5 адреса, мультиплексоров запускаемьам от генератора 4 импульсов и синхронизированным по циклам сигналом младшего разряда преобразователя 2 Уголкод (ПУК). Выход формирователя 5 адреса мультиплексоров (ФАМ) подключен к адресным входам мультиплексоров 1 и 11. Цикл сравнения кодов происходит начиная со старших разрядов. При этом изменение номера сравниваемых разрядов, формируемого . 5 J происходит через интервалы времени, соответствующие скорости движения каретки ЦСС, при которой из данно J ее положения торможением можно привести систему в состояние раЕНОвесия (конец обработки) с нулевой скоростью.
Триггер 7 управления, на установочные входы которого поступают сигн лы с выходов первого сумматора 6 по модулю два и младшего разряда ШЛК 2, вырабатывает импульс длительностью,- определяемой Ф/iM 5 и текущим положением каретки ЦСС.
D-триггер 8 осуществляет сравнение длительностей импульса с триггера 7 управления и интервала времени
изменения м5:адшего разряда кода ПУК 2, которое определяет реальную мгновенную скорость движения каретки ЦСС. В том случае, если скорость каретки выше требуемой при данном рассогласовании (разности кодов входного регистра в ПУК), т.е. интервал времени изменения меньше длительности импульса с триггера 7 управления, перепись сигнала D-входа на выход
Q D-триггера 8 происходит в Момент наличия единичного уровня триггера управления, и на выходе D-триггера 8 фиксируется логическая единица. Аналогично, при скорости движ ния каретки меньшеположенной на выходе D триггера 8 записывается логический нуль. Очевидно, сигнал с выхода D-триггера 8 однозначно определяет необходимость дальнейшего торможения, либо разгона каретки ЦСС.
0 Второй сумматор 13 по модулю два, входы которого соединены с выходами D-триггера 8 и триггера 12 знака, а выход поступает на вход блока 9 управления двигателем 3, обеспечивает
5 инвариантность закона управления ЦСС к направлению перемещения каретки, так как торможение при движении каретки в одну сторону полностью эквивалентно разгону в противоположную.
Q Предлагаемое построение системы позволяет упростить схему, устранить ненадежные тахогенератор и усилитель постоянного тока. Кроме трго, построение поразрядного сравнивающего
, устройства в виде двух мультиплексоров 1 и 11 и суьв.1атора б по модулю два позволяет в случае размещения мультиплексора 1 совместно с ПУК 2 сократить число гибких проводников, соединякядих обратный преобразователь
С .с каналом прямого преобразования
ЦСС с 2 до N+1, где N - разрядность адресации мультиплексоров, зависящая от точности.
Формула иэовретения
цифровая следящая система, содержащая генератор импульсов, первый и
второй триггеры и включенные последовательно исполнительный блок и двигатель, кинематически связанный со входом преобразователя Угол-код, отличающаяся тем, что, с целью повьаиения надежности и упрощения системаf она содержит мультиплексо ял, суммАто, третий триггер и адресный блок, подключенный выходами к первым входам мультиплексоров, первым входом - к выходу генератора
импульсов, а вторым входом - к первым входам второго и третьего триггеров и выходу млгщшего разряда преобразователя Угол-код, соединенного выходами со вторыми входами первого мультиплексора, выход которого
подключен к первым входам первого сумматора и первого триггера, соединенных вторыми входами с выходом второго мультиплексора, подключ нного вторыми входами к выходам регистра, а третий вход первого триггера соединен с выходом первого сумматора и вторам входом второх о триггера, подключен юго выходом ко второму входу третьего триггера, выход которого и выход первого триггера соединены через второй сумматор со входом исполнительного блока.
Источники информации, принятые во внимание при экспертиэе
1.Авторское свидетельство СССР 172510, кл. G 05 В 11/26.
2.Авторское свидетельство СССР
541143, кл. G 05 В 11/26 (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1974 |
|
SU541143A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Многоканальное устройство для регистрации информации | 1984 |
|
SU1236452A1 |
| Многоточечное регистрирующее устройство | 1985 |
|
SU1254301A1 |
| Цифровой следящий привод | 1980 |
|
SU941926A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU339905A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| МОДЕЛИРУЮЩИЙ КОАП | 2013 |
|
RU2516703C1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Цифровая следящая система | 1978 |
|
SU779974A1 |
О
