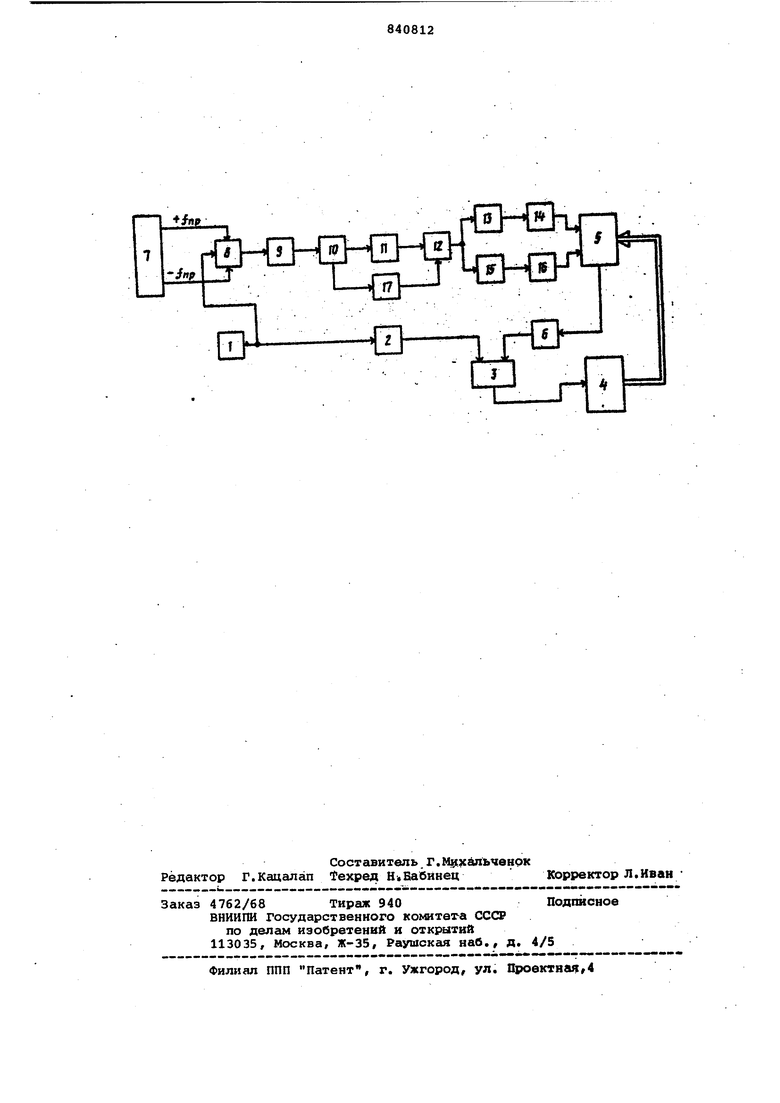
Изобретение относится к автомати-ке и вычислительной технике и может быт использовано в системе программного управления станками, приборестроении, робототехнике и других областях, где получают програглмируемое перемещение. Известно устройство для программного управления, в котором блок эада ния программы и датчик положения через формирователи з апитки датчика положения и сигнала обратной связи подключены к первому и второму входам фазового дискриминатора Ц. Недостатком этого устройства являетбя низкгш точность отработки програ мы за счет погрешности положения вызванной фазовыми погрешностями фильтров питайщега напряжения датчиков, нестабильностью амплитуды питающего напряжения датчика и фазовыми погрешностями формирователя сигнала обратной связи, которые возникают при изменении сколоти движения. Наиболее близким к изобретению по технической сущности является устройстао в котором программу вводят в ка нал обратной связи. При этом с ротора датчика положения снимается сигнал с постоянной частотой во всем диапазоне управления, что обеспечивает работу фазового дискриминатора и формирователя сигнала обратной связи на фиксированной частоте при постоянной скорости перемещения, и тем самым уменьшает сишбку измерения положения и повышает точность отработки программы. Питание датчика положения осуществляется напряжением прямоугольной фор№1 переменной частоты Г23. Однако это приводит к появлению дополнительных погрешностей отработки программы при регулировании в широком диапазоне, обусловленных несинусоидальностью питающего напряжения. Цель изобретения - повышение точности устройства для программного управления приводом за счет улучшения формы и повышения стабильности фаз питающего напряжения датчика положения Поставленная цель достигается тем, что в устройство, содержащее блок управления/ последовательно соединенные генератор импульсов, первый делитель частоты, фазовяяй дискриминатор, исполнительный механизм, датчик положения исполнительного механизма и согласукгций элемент, подключенный выходом к второму входу фазовозто дискриминатора, и последовательно соединенные интерполятор, сумматор, под1слк)ченный третьим входом к выходу генератора импульсов, и второй делитель частоты, дополнительно введены последовательно соединенные, счетчик импульсов, блок, памяти/ коммутатор, пе вый цифроаналоговый преобразователь, и первый, усилитель, и последовательно соединенные второй цифроаналогевый «реобразователь и второй усилитель, вход счетчика импульсов соединен с вы ходом второго делителя частоты, второ выход - через блок управления с вторым входом коммутатора, подключенного выходом к входу второго цифроаналогового преобразователя, а выходы первого и второго-усилителей соединены. с выходами датчика перемещения исйолнительного механизма. На чертеже представлена блок-схема устройства. Устройство содержит последовательно соединенные генератор импульсов 1, первый делитель 2 Частоты, фазовый дискриминатор 3, исполнительный механизм 4, датчик 5 положения исполнительного механизма и согласующий элемент 6, подключенный выходом к второму входу фазового дискриминатора, последовательно соединенные интерполятор 7, сумматор 8, подключенный третьим входом к выходу генератора и импульсов, второй делитель 9 частоты счетчик 10 импульсов, блок 11 памяти коммутатор 12, первый цифроаналого- вый преобразователь (ЦАП) 13, первый усилитель 14 и последовательно свединенные второй ЦАП 15 и второй усилитель 16, Второй выход счетчика импуль сов через блок 17 управления соединен с вторым входом коммутатора, подключенного выходом к входу второго ЦАП. Выходы первого и второго усилителя соединены с входами датчика пере мещения исполнительного механизма. Устройство работает следующим образом. С выхода интерполятора 7 на вход сумматора 8 поступает сигнал задания частотой +fp|p или - пропорциональной скорости перемещений. В сумматоре происходит сложение (вычитание) и синхронизация с тактовой частотой сигнала с генератора 1 импульсов. С выхода сумматора через согласующий второй делитель 9 сигнал управле.ния в цифровом виде поступает на счетчик 10 импульсов, где формируется текущее значение кода программы, поступающее на вход блока 11 памяти, с которого .считываются коды, пропор циональные . синусу и косинусу кода прогрс1ммы, Блок управления и коммутатор 12 производят их разделение и выдачу на ЦАП 13 и 15. Сигналы с выходов ЦАП через усилители 14 и 16 подаются на вход датчика 5 положения исполнитель ного механизма.Сигнал с выхода датчика имеет вид Ш А 5 i п ( Шр t + Ч ) , где А - постоянная амплитуда сигнала датчика, оыр - постоянная частота, Ц - угол рассогласования между заданным положением вала привода и истинным. Сигнал Vgjjj через согласующий элемент б поступает на второй вход фазового дискриминатора 3, где сравнивается с сигналом первого делителя . Сигнал ошибки с-выхода дискриминатора воспринимается исполнительным механизмом 4. Таким образом, повышение точности устройства достигается тем, что во всем диапазоне задаваемых скоростей движения питание датчика положения исполнительного механизма производится строго синусоидальными напряжениями сдвинутыми между собой на 90 электрических градусов. Использование предлагаемого устройства позволяет повысить точность работы привода на 10-15% при диапазоне рабочих скоростей 0-2 м/мин. Формула изобретения Устройство для программного управления приводом, содержащее блрк управления, последовательно соединенные генератор, импульсов, первый делитель частоты, фазовый дискриминатор, исполнительный механизм, датчик положения исполнительного механизма и согласующий элемент, подключенный выходом к к второму входу фазо.вого дискриминатора, и последовательно соединенные интерполятор, сумматор, подключенный третьим входом к выходу генератора импульсов, и второй делитель частоты, отличающеес я тем, что/ с целью повышения точности устройства, оно содержит последовательно соеди-. ненные счетчик импульсов, блок памяти, коммутатор, первый цифроаналог говый преобразователь и первый усилитель, и последовательно соединенные второй цифроаналоговый преобразователь и второй усилитель, вход счетчика им-. пульдов соединен с выходом второго делителя частоты, второй выход - через блок управления с вторым входом коммутатора, подключенного выходом к входу второго цифроаналогового преобразователя, а выходы первого и второго усилителей соединены с входами датчика перемещения исполнительного механизма. Источники информации, приняфые во внимание при экспертизе 1.Авторское свидетельство СССР № 550621, кл. G 05 В 19/18, 1975. 2.Авторское свидетельство СССР 435505, кл. G 05 В 19/36, 1973. (прототип) г4ТИ Т1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения перемещения | 1982 |
|
SU1334045A1 |
| Устройство для управленияпРиВОдОМ | 1978 |
|
SU809056A1 |
| Устройство для регулирования расходов компонентов при смешении | 1977 |
|
SU696422A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| Двухкоординатная система для программного управления | 1985 |
|
SU1249483A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ПЬЕЗОДАТЧИКОВ | 1991 |
|
SU1817652A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| Регулятор температуры | 1980 |
|
SU934457A1 |