(54) ДИНАМОМЕТРИЧЕСКАЯ БОРШТАНГА ДЛЯ ГЛУБОКОГО СВЕРЛЕНИЯ ОТВЕРСТИЙ
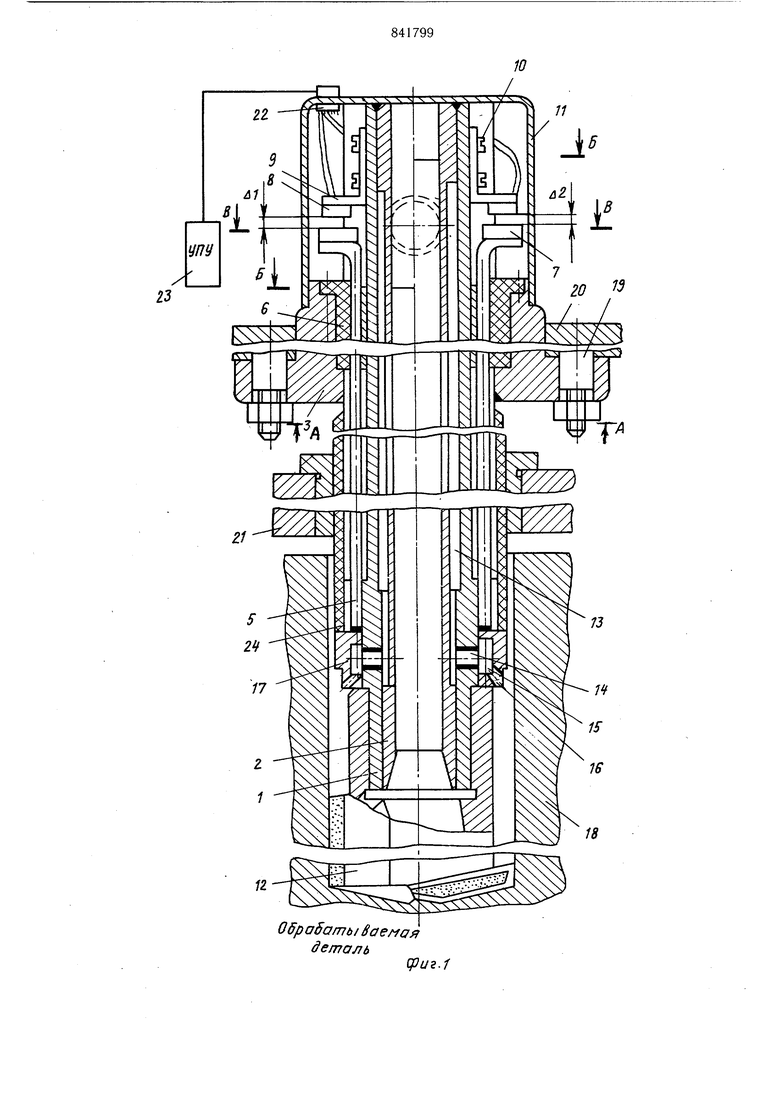
тивного бесконтактного датчика. Катушки 8 датчиков расположены на кронштейнах 9, установленных на полом корпусе 1.
Между рабочими торцами якорей 7 и катушек 8 индуктивности, расположенных в плоскости, перпендикулярной оси борштанги, имеются воздушные зазоры Д,, Да, величина которых регулируется перемешением крон штейнов заСчет пазов, имеюшихся в их основании. Достигнутое положение кронштейнов фиксируют винтами 10.
Измерительная часть динамометрической борштанги зашишена кожухом И, установленным на фланце 3.
Режуш,ий инструмент (насадная сверлильная головка 12) устанавливается на переднем ее конце полого корпуса 1.
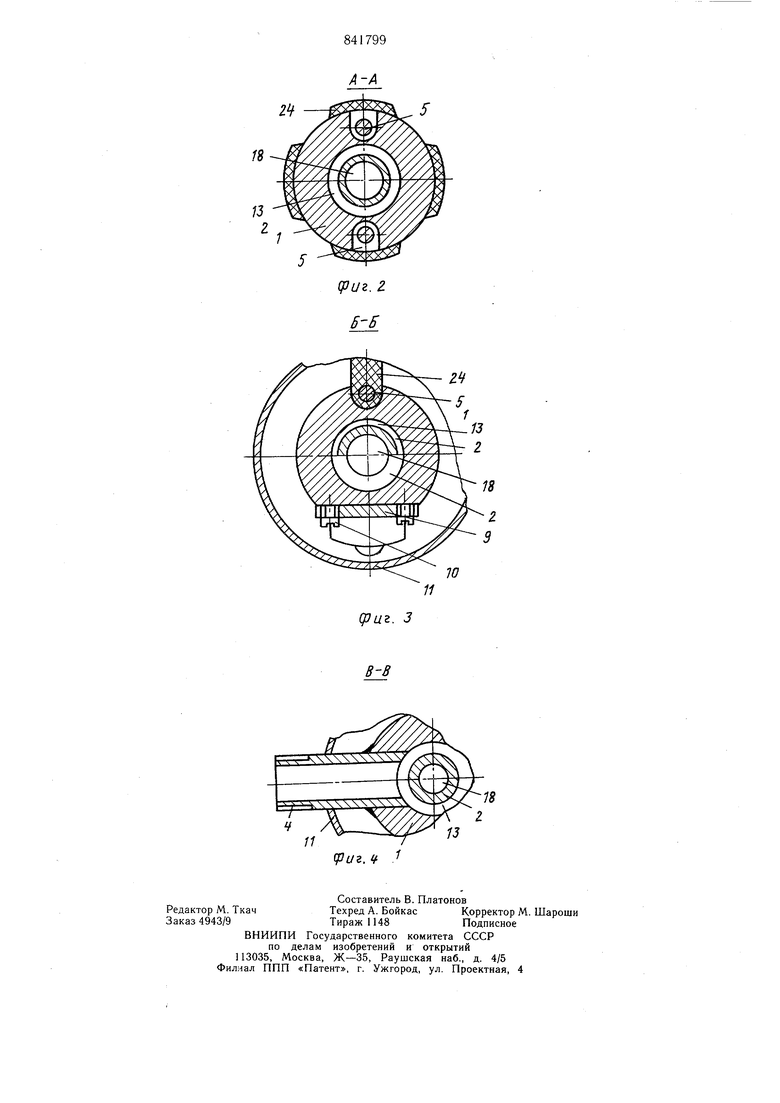
В хвостовой части полого корпуса 1 жестко установлен штуцер 4, предназначенный для подачи под давлением смазываюшеохлаждающей жидкости (СОЖ) в зону резания. Также для подвода СОЖ в зону резания служат полость 13, имеюшаяся между полым корпусом 1 и трубой 2; отверстие 14 в полом корпусе 1, полость 15 и отверстие 16, находяшиеся во втулке 17, неподвижно закрепленной на полом корпусе 1 возле насадной сверлильной головки 12.
Для транспортировки стружки и СОЖ из зоны резания служит центральное отверстие
18в трубе 2.
Динамометрическая борштанга устанавливается неподвижно при помоши шпилек
19и гаек в суппорте 20 станка с использованием дополнительной опоры 21.
Питание и съем сигналов и индуктивных бесконтактных датчиков осушествляется через разъем22, расположенный на кожухе И. Разъем 22 приводной связью соединен с усилительно-преобразовательным устройством 23 (УПУ).
На цилиндрической части полого корпуса 1 установлены четыре текстолитовые направляюшие 24, две из которых закрывают пазы с расположенными в них стержнями от попадания стружки.
Динамометрическая борштанга работает следуюш.им образом.
В процессе глубокого сверления под действием тангенциальных составляюших силы резания происходит скручивание цилиндрической части корпуса 1 относительно сечения Б-Б жесткого крепления последнего во фланце 3, который неподвижен относительно суппорта станка 20. В результате скручивания сечение А-А, где жестко заделаны стержни, изменяет свое угловое и линейное положение относительно сечения Б Б. Изменение линейного положения обусловлено увеличением длины полого корпуса 1, возникающего в результате его скручивания. При этом стержни 5 перемешаются вместе с сечением А-А заделки, так как они расположены одним концом каждый в опоре скольжения 6. Длина стержней остается
ПОСТОЯННОЙ, так как они не подвержены воздействию нагруз си. Это приводит к изменению величины воздушных зазоров & |, Д и коэффициентов самоиндукции катушек 8 индуктивности ппопорционально линейному
удлинению полого корпуса 1, который имеет при глубоком сверлении значительную длину. Сигналы с индуктивных датчиков суммируются и поступают в усилительно-преобразовательное устройство 23 (УПУ). УПУ имеет протарированный контрольный прибор, который дает информацию о возникшей величине крутящего момента на сверлильной головке.
При изменении в процессе обработки твердости обрабатываемого материала, появлении раковин, затуплении режущего инструмента происходит изменение величины тангенциальных составляюших силы резания и крутящего момента. Это вызывает отклонение угла закручивания цилиндрической части полого корпуса 1 и его удлинения. В результате изменяются величины воздушных зазоров. Электрические сигналы с датчиков, пропорциональные возникшему изменению зазоров, поступают в УПУ, которое вырабатывает соответствующий сигнал для осуществления необходимой корректировки хода процесса глубокого сверления (например, изменение осевой подачи динамометрической борщтанги) или вывода инструмента из отверстия в случае превышения величины возникшего крутящего момента заданной величины последнего. Таким образом, инструмент предохраняется от перегрузок и поломок. Канал 18 внутри борштанги используется для отвода стружки из зоны резания и СОЖ.
Формула изобретения
1. Динамометрическая борштанга для глубокого сверления отверстий, содержащая полый корпус, трубу, стержень с дополнительной опорой и измерительную часть, отличающаяся тем, что, с целью измерения собственных упругих деформаций кручения, на наружной поверхности полого корпуса выполнены пазы, в которых установлены стержни, одни концы которых закреплены в передней части полого корпуса, другие концы снабжены якорями, рабочие торцы которых расположеньг с зазором относительно катушек индуктивности измерительной части, причем труба жестко закреплена
внутри полого корпуса.
2. Борштанга по п. 1, отличающаяся тем, Tto, рабочие плоскости якорей и катушек индуктивности расположены в плоскости, перпендикулярной оси борщтанги. Источники информации,
принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке № 2764103/25-08, кл. В 23 В 49/00 1979.
23
05ра5агт ь/
деталь
11
Б
i
18
(риг.
5
(риг. 3
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамометрическая борштанга для глубокого сверления отверстий | 1981 |
|
SU986639A2 |
| Динамометрическая борштанга для глубокого сверления отверстий | 1983 |
|
SU1085700A2 |
| Динамометрическая оправка длязЕНКЕРОВАНия | 1979 |
|
SU818768A1 |
| Динамометрическая расточная борштанга | 1980 |
|
SU921700A2 |
| Сверло | 1982 |
|
SU1127704A2 |
| Эжекторное сверло | 1983 |
|
SU1111851A1 |
| Сверло | 1981 |
|
SU992134A2 |
| Динамометрическая расточная скалка | 1976 |
|
SU657919A1 |
| Устройство для глубокого сверления | 1986 |
|
SU1421470A1 |
| ШПИНДЕЛЬНЫЙ УЗЕЛ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1996 |
|
RU2107592C1 |