(54) ДИНАМОМЕТРИЧЕСКАЯ РАСТОЧНАЯ БОРШТАНГА
1
Изобретение относится к машиностроению, в частности к обработке отверстий растачиванием резцами и резцовыми блоками, зенкеровании насадными зенкерами на станках расточного типа с использованием переднего и заднего направлений и оснащенных системами адаптивного управления (САУ) упругими перемещениями системы СПИД.
По основному авт. св. № 574279 известна динамическая расточная борштанга, содержащая полый корпус, в котором консольно закреплен стержень и катушка с якорем колебательного контура с автономным источником питания 1.
Позволяя регистрировать собственные упругие деформации, вызванные действием радиальной составляющей силы резания динамометрическая борштанга вместе с тем не позволяет использовать для обработки отверстий резцовые блоки и насадные зенкеры и измерять при этом собственные упругие деформации под действием радиальной и тангенциальной составляющих силы резания или крутящего момента,
что снижает точность получения информации о ходе обработки.
Цель изобретения - расширение технологических возможностей устройства и повышение точности измерения деформаций борштанги
Поставленная цель достигается тем, что расточной динамометрической борштанге, имеюшей сквозной паз для прохода резца или резцового блока, установлены по середине на втулке перпендикулярно друг другу две катушки индуктивных бесконтактных датчиков, регулируемые якори которых базируются в корпусе, а на свободном конце расположен неподвижно закрепленный гетероэпитаксиальный элемент. Концы последнего жестко заделаны в торце корпуса борштанги, на котором выполнены отверстия под штифты и резьба, предназначенные для установки сменной шайбы и гай. ки, служащих для закрепления насадных
20 зенкеров.
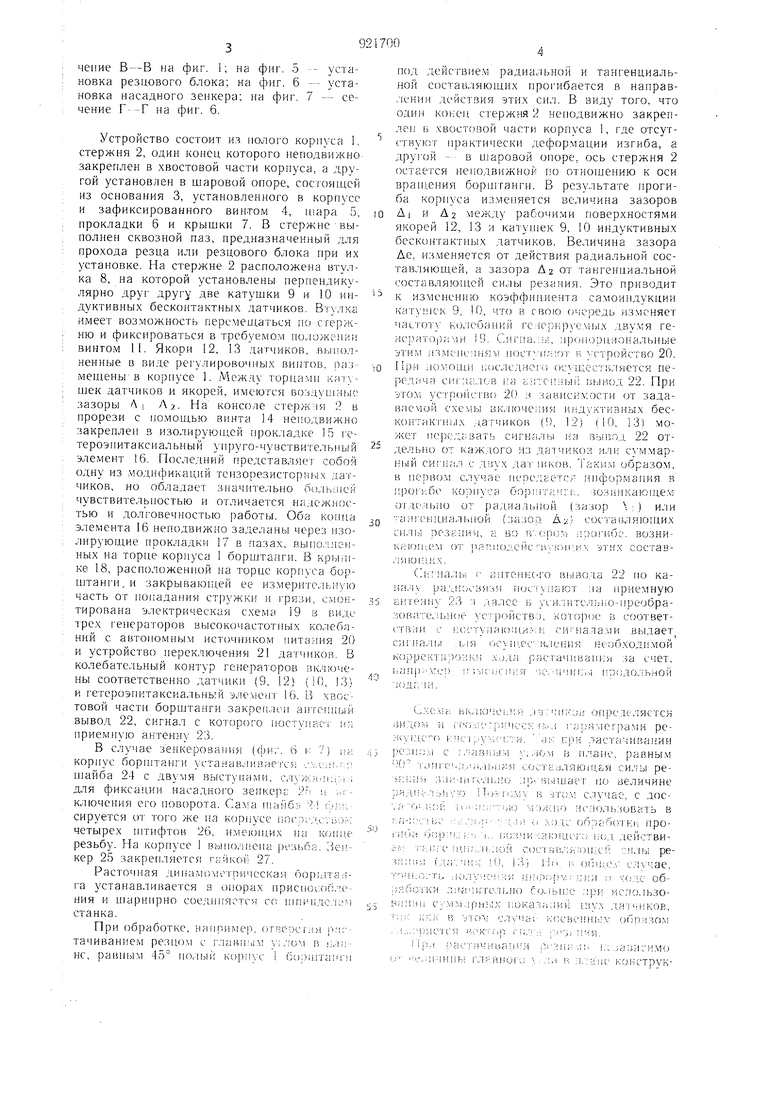
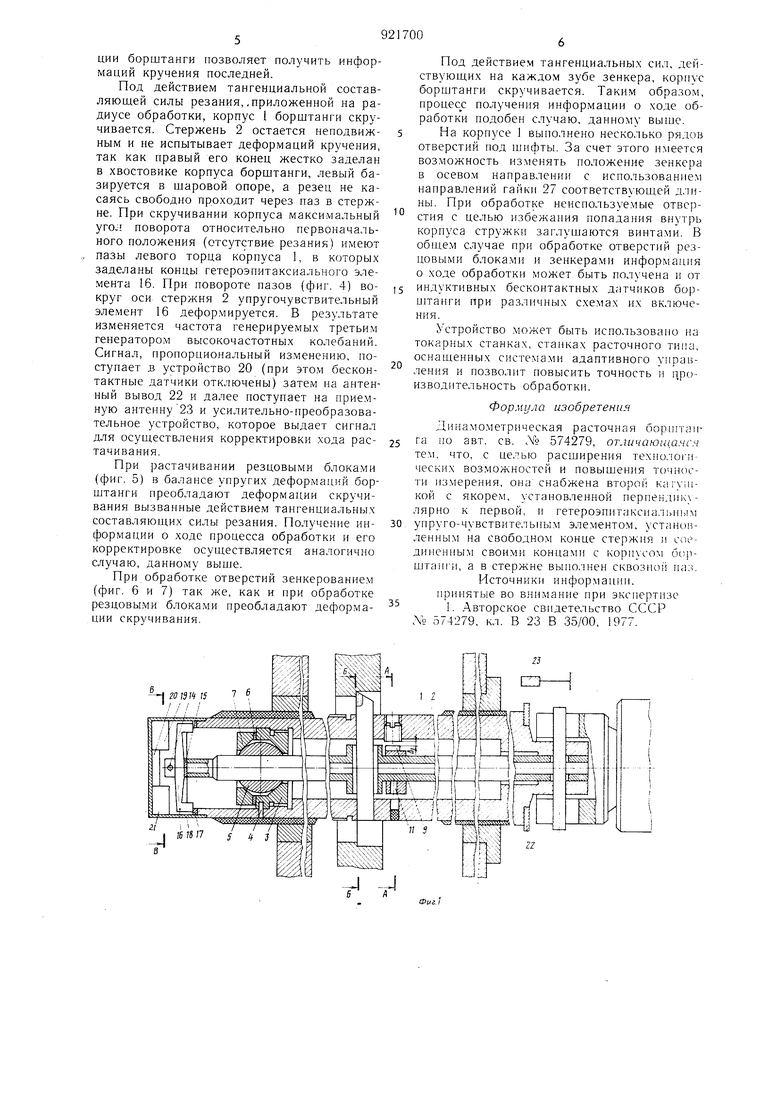
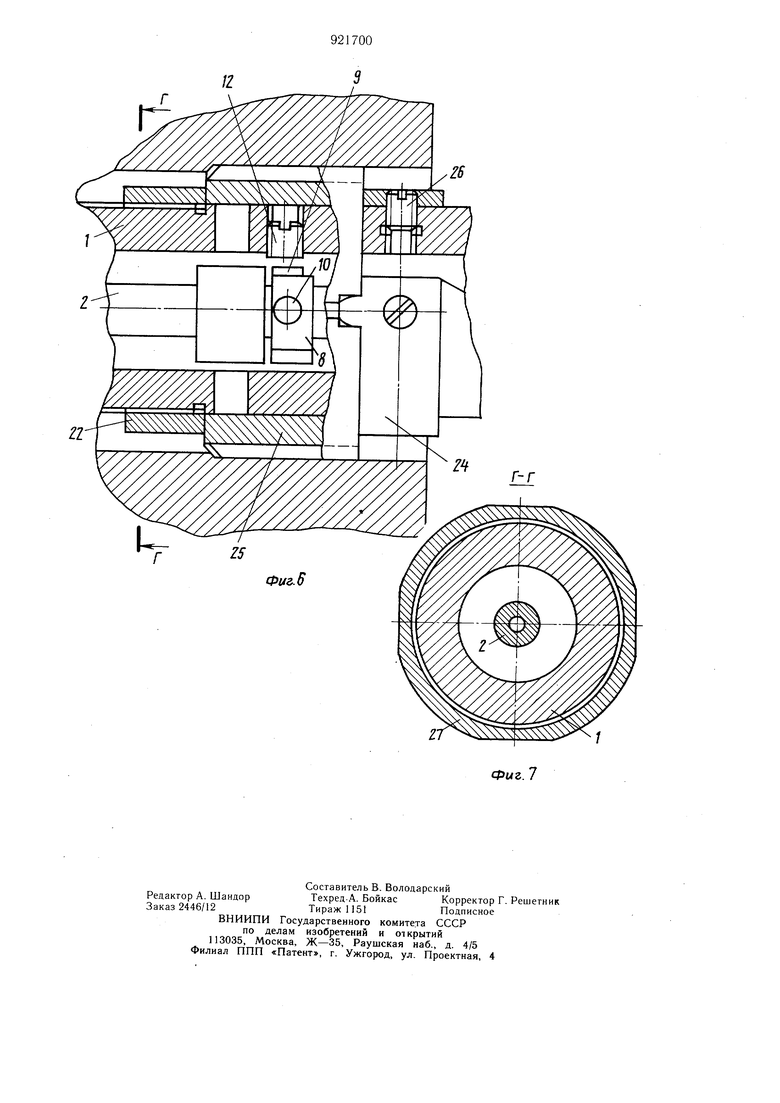
На фиг. 1 изображена расточная динамометрическая борштанга, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 1; на фиг. 4 - сечепие В - В на фиг. 1; на фнг. 5- установка резцового блока; на фиг. 6- установка насадного зенкера; на фиг.7 - сечение Г -Г на фиг. 6.
Устройство состоит из нолого корпуса 1, стержня 2, один конец которого неподвижно закреплен в .хвостовой части корпуса, а другой установлен в шаровой оноре, состоящей из основания 3, установленного в корнусе и зафиксированного винтом 4, тара 5, нрокладки 6 и крышки 7. В стержне выполнен сквозной паз, предназначенный для про.хода резца или резцового блока при их установке. На стержне 2 расположена втулка 8, на которой установленьЕ перпендикулярно друг другу две катушки 9 и 10 индуктивных бесконтактных датчиков. Втулка имеет возможность перемещаться по стержню и фиксироваться в требуемо. положении винто.м 11. Якори 12, 3 датчиков, .выполненные в виде регулировочных винтов, размешеньг в корпуее 1. Между тopцa.пl к;) датчиков и якорей, имеются воздушные зазоры AI Л ;. На консоле стерж:1я 2 в прорези с ио.мошь.ю винта 14 неио.авижно закреплен в изолирующей прокладке 15 гетероэпитаксиальный упруго-чувствительный элемент 16. Последний представляет собой одну из модификаций тензорезисторкых датчиков, но обладает значительно б;,)„1ь,п1сй чувствительностью и отличается надежностью и долговечностью работы. Оба Koinia элемента 16 неподвижно за.де.ланы через 130лирующие прокладки 17 в пазах, выпо.чнепных на торце корпуса 1 борштанги. В крьппке 18, расноложенной на торце корпуса борштанги, и закрываюпхей ее измерителыгую часть от П01 ада1п-1я ст|1ужки н грйзи, с.и.)нтирована электрическая схе.ма 19 в виде трех генераторов выеокочастотпых колебаний с автономным ист()Ч П1Ком питания 20 и устройство переключения 21 датчиков. В колебате.тьный контур генераторов к,1ючены соответственно датчики (9, 12) (0-, .)} и гетероэгщтакеиальный эле.мент 16. В хвостовой части борщтанги закрегьлсп антепиь:й вывод 22, сигнал с которого посту laci и;; приемную антенну 23.
В случае зещ-серовапия (фиг. 6 к 7) па корпус борп танги устанавлипается -:,. 1найба 24 с двумя вь(cтvlla lИ, служм : :.: i ; для фиксации насадно1о зенкерг.; 2- у, ;.;ключения его поворота. Сал:а - ;-.)i сируется от того же на корнусе пп(; ;лл:тиС);-: четырех пггифтов 26, имеющих nti кстще резьбу. На корпусе 1 выполиепа резьба. Зенкер 25 закренляетея гайкой 27.
Расточпая дипамс/мо1пическа:- бо);1та устанавливается в опорах присиосоп./ения и шарнирно сое;ип ястся со щпииделсм станка.
При обработке, например, ()гвепсг:1 1 plrтачиванием резцом с главщим :лом в , paiiHbiM 45° полык корпус 1 ());); та;ч |
под дейс1вие.1 радиа;1ьной и тангенциальной составляющих прогибается в направ,лении действия этих сил. В виду того, что одй1-1 коней стержня 2 негюдвижно закрепле1 li хвостовой части корпуса 1, где отсутствуют практически деформации изгиба, а дру|ой - в шаровой опоре, ось стержня 2 остается неподвижной по отношению к оси враи.е1щя борпгганги. В результате прогиба корпуса измепяется величина зазоров А и А2 между рабочи.ми поверхностями якорей 12, 13 и катуп1ек 9, 10 индуктивных бесконтактпых датчиков. Величина зазора Ае, изменяется от действия радиальной составлиюш.ей, а зазора А г от тангеьпиальной составляющей силы резания. Это приводит к изменению коэ({)фициента самоиндукции ка 1пек 9, 10, что в свою очередь изменяет частоту ко;1ебапий гетещгрхСли х .твумя геэтим измсч1е:п;я 1 nocTyi :i:OT в .стройство 20. При полЮпхп кнледнег() ос дцествляется передача сп1аа;к./в i;a ; г:сп:-П)П1 ;i ilиGд 22. При этом устройстги) 20 и завпс11кости от задаBaeviijH схемы включения 11)дуктизнь;х бес о1ггакт1и,1х датчико (П, 12; (KJ, 13) может передавать сигна.ль1 i-ia Bbfisn.j, 22 отдельно от каж.того из датчиков или суммар1П)1Й сигнал с ДВУХ дат Птков. аким образом, в первом случае передаетсг ипформапия в прогибе корпуса б0):1т ;;ги. Ю31 пкаю1цел; (jT/u-; biio от рал,иал1Л1ОЙ (зазор ; ) или ангенциальпой (зазоа А;;} составляклпих с:плы пезнпич, а во ir. CMIDM поигнбсу возни1 ;моП|ем (Уг рягподейсТУ; О1г,ил этих составля loniiix.
(л:Г11а;П)1 i aiiTein;(io 22 но каHa.iv ра.д-кхсвизн поступают на приемную а} тенну 23 ч далее к Чи;;итс,пьио-преобразоваге;:1)Иое ч: )ойствj, (; в соответств;п1 с псступающиГЛ-; сигналами выдает Ciniia,, 1ЛЯ ocvniec в.е11ия необходимой KODOCKTUPOHi ; xo/ia оасгачивап1:я за счет.
(...хели; в лю;е : ;:. . i м ; И К j li опреде.1ястся iin;i,OM и гоо.ое :г;ичсск if..,1 rtipaNicrpayin ре:-i yi:.,, ич;у| ,луС|У; н. dK при раста--1ива ии |:е.:п:;л1 С : ,,-1 Biibc.i В плапс, равным К;- ,;::r;i,,ii iif:si соста лЯюI я силы ре5;:::;i;i 3;i;:-ni гельпо :ip ыщает по величине ;).. :Т:) в случае, с .юс.; о; i;;:i: i i -; :;: :ьи} M:) пслоль: овать в :.; ;::: :::..-,;; :,; ., ;);i.y o6;iaf)OTKi4 проiHvKi ix;p:.; i. ч ,, л;;;чи:;п:):цсг:; lic.l .чействиriv; ГУiyc ;11;:улf.:io:-i состап,:)УС)п;хй лмы реi;;M;); 1;иГ. ЧИч 1(1 I i м jbi ; ()ПП;0. ЛУЧае, 4Lr;:-Ti., ).iy4( и ;|Л;; }-л: ;:ии ;) чоуе об;;я6отки злангге-пдк) co.ibnie :;ри исггользоHMiiViii С;У1М:.рных показаний usyx д,атчиков, у--; ку;.; в УЮУ; случу; к()све1П11;л: .у.умую ся iyKfop ri;.- :У-jr y-fiy
Mi);i yacTaMiibaiity-i |УУ-:п;: sn. i.. .;a;);KHM(j i.; -1.Уiii4 -i bi глрлнпогу; ,у,. Н :i.;aiic конетрукции борштанги позволяет получить информации кручения последней.
Под действием тангенциальной составляющей силы резания, .приложенной на радиусе обработки, корпус 1 борштанги скручивается. Стержень 2 остается неподвижным и не испытывает деформаций кручения, так как правый его конец жестко заделан в хвостовике корпуса борштанги, левый базируется в шаровой опоре, а резец не касаясь свободно проходит через паз в стержне. При скручивании корпуса максимальный угол поворота относительно первоначального положения (отсутствие резания) имеют пазы левого торца корпуса 1, в которых заделаны концы гетероэпитаксиального элемента 16. При повороте пазов (фиг. 4) вокруг оси стержня 2 упругочувствительный элемент 16 дефор.мируется. В результате изменяется частота генерируемых третьим генератором высокочастотных колебаний. Сигнал, пропорциональный изменению, поступает в устройство 20 (при этом бесконтактные датчики отключены) затем на антенный вывод 22 и далее поступает на приемную антенну23 и усилительно-преобразовательное устройство, которое выдает сигнал для осуществления корректировки хода растачивания.
При растачивании резцовыми блоками (фиг. 5) в балансе упругих деформаций борщтанги преобладают деформации скручивания вызванные действие.м тангенциальных составляющих силы резания. Получение информации о ходе процесса обработки и его корректировке осуществляется аналогично случаю, данному выше.
При обработке отверстий зенкерованием (фиг. 6 и 7) так же, как и нри обработке резцовыми блоками преобладают деформации скручивания. ---1 ffwtt tf 7 / / / /.
Под действие.м тангенциальных сил, действующих на каждом зубе зенкера, корпус борштанги скручивается. Таким образом, процесс получения информации о ходе обработки подобен случаю, данному выше.
На корпусе 1 выполнено несколько рядов отверстий под шифты. За счет этого имеется возможность изменять положение зенкера в осевом направлении с использованием направлений гайки 27 соответствующей длины. При обработке неиспользуе.мые отверстия с це;1ью избежания попадания внутрь корпуса стружки заглушаются винтами. В общем случае при обработке отверстий резцовыми блоками и зенкерами информация о ходе обработки .может быть получена и от индуктивных бесконтактных датчиков борштанги при различных схемах их включения.
Устройство может быть использовано на токарных станках, станках расточного тина, оснащенных системами адаптивного управления и позволит повысить точность и производительность обработки.
Формула изобретения
Динамометрическая расточная бориггамга по авт. св. Yo 574279, отличающаяся тем, что, с целью расширения техно, О1ических возможностей и повышения точности пз.мерения, она снабжена второй каг ;икой с якорем, установленной перпендикулярно к первой, и гетероэнитаксиал1 ным упру го-чувствительным элементом, у ста нов„ченным на свободном конце стержня и соединенным своими концами с корпусом борштанги, а в стержне выно.чнен сквозно иаз. Источники информации,
принятые во внимание при экспертизе
. Авторское свидетельство СССР Л« 574279, кл. В 23 В 35/00, 1977. 6
5-5
Фиъ.2
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамометрическая борштанга дляглубОКОгО СВЕРлЕНия ОТВЕРСТий | 1979 |
|
SU841799A1 |
| Динамометрическая оправка | 1990 |
|
SU1830303A1 |
| Динамометрическая оправка длязЕНКЕРОВАНия | 1979 |
|
SU818768A1 |
| Динамометрическая расточная скалка | 1976 |
|
SU657919A1 |
| СПОСОБ ОБРАБОТКИ ШЕЕК КОРЕННЫХ ПОДШИПНИКОВ БЛОКА ЦИЛИНДРОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И КОМБИНИРОВАННЫЙ ИНСТРУМЕНТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2107590C1 |
| Динамометрическая борштанга для глубокого сверления отверстий | 1981 |
|
SU986639A2 |
| Расточная динамометрическая оправка | 1980 |
|
SU891248A1 |
| Устройство для автоматической подналадки многорезцовых станков | 1979 |
|
SU876313A1 |
| Инструмент для обработки отверстий | 1981 |
|
SU1009643A1 |
| Расточная головка | 1981 |
|
SU990428A1 |
в-в
/
IS
Фиг. 4
фиг. 7
