(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ РАБОТЫ УДАРНОГО ИНСТРУМЕНТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для модулирования ударного взаимодействия | 1975 |
|
SU604010A1 |
| Устройство для моделирования ударных систем | 1973 |
|
SU451102A1 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| Устройство для решения нелиней-НОгО АлгЕбРАичЕСКОгО уРАВНЕНия | 1979 |
|
SU798894A1 |
| Электронная модель удара | 1977 |
|
SU658575A1 |
| Устройство для моделирования удара тела о неподвижную преграду | 1985 |
|
SU1381341A1 |
| Устройство для измерения времени запаздывания текучести материалов при динамических испытаниях | 1985 |
|
SU1364954A1 |
| УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО СИГНАЛА | 1997 |
|
RU2105950C1 |
| Устройство для моделирования разрушения хрупкой среды | 1981 |
|
SU972526A1 |
| Устройство для регулирования режимов работы скиповых подъемных установок | 1987 |
|
SU1430334A1 |
1
Изобретение относится к вычислительной технике и автоматике и может быть использовано при моделировании работы ударного инструмента.
Известна электронная модель удара, содержащая блоки интегрирования ускорения и скорости соударяющихся тел и три сумматора, выходы которых соединены соответствующими разделительными диодными элементами flj .
Однако наличие в этом устройстве электромеханических переключающихся элементов приводит к снижению надёжности и усложнению настройки и регулировки схемы.
Наиболее близким к предлагаемому является устройство, содержащее интеграторы ускорения и скорости соударяютцихся тел, .блоки задания разрыва нача{;1ьного зазора послеударной скорости 23 .
Недостатком этого устройства является отсутствие возможности моделирования перемещения ударного инструмента при циклическом воздействии н обрабатываемую поверхность при ее разрушении, когда изменяется начальный зазор между соударяющими телами. Причем это изменение зазора зависит
от технических характеристик обрабатываемого материала.
Цель изобретения - расширение функциональных возможностей устройства.
Поставленная цель достигается . тем, что в устройство для моделирования работы ударного инструмента, содержащее блоки интегрирования уско0рения и скорости, блок задания начального зазора., блок задания послеударной скорости и пороговый элемент, причем вход интегрирования ускор ия является входом устройства, выход
5 блока интегрирования ускорения соединен со входом блока интегрирования скорости, связанным со входом порогового элемента, дополнительно введены первый и второй триггеры Шмитта, блок
0 задания нелинейности, блок выделения максимума и ключ, причем выход блока интегрирования ускорения соединен с одним входом первого триггера Шмитта, выход которого соединен с
5 первым управляющим входом ключа, выход которого соединен со вторым входом блока интегрирования скорости, выход которого связан со входом за- Дания нелинейности, выход которого
0 соединен с одним входом блока выделения максимума, выход котсро.то через второй триггер Шмитта соединен со вторым управляющим входом ключа, связанного информационным входом с выходом поррговрго элемента, причем Выходы блоков задания начального зазора и послеударной скорости соединены соответственно с другими входами первого триггера Ымитта и .
блоки выделения максимума,. t
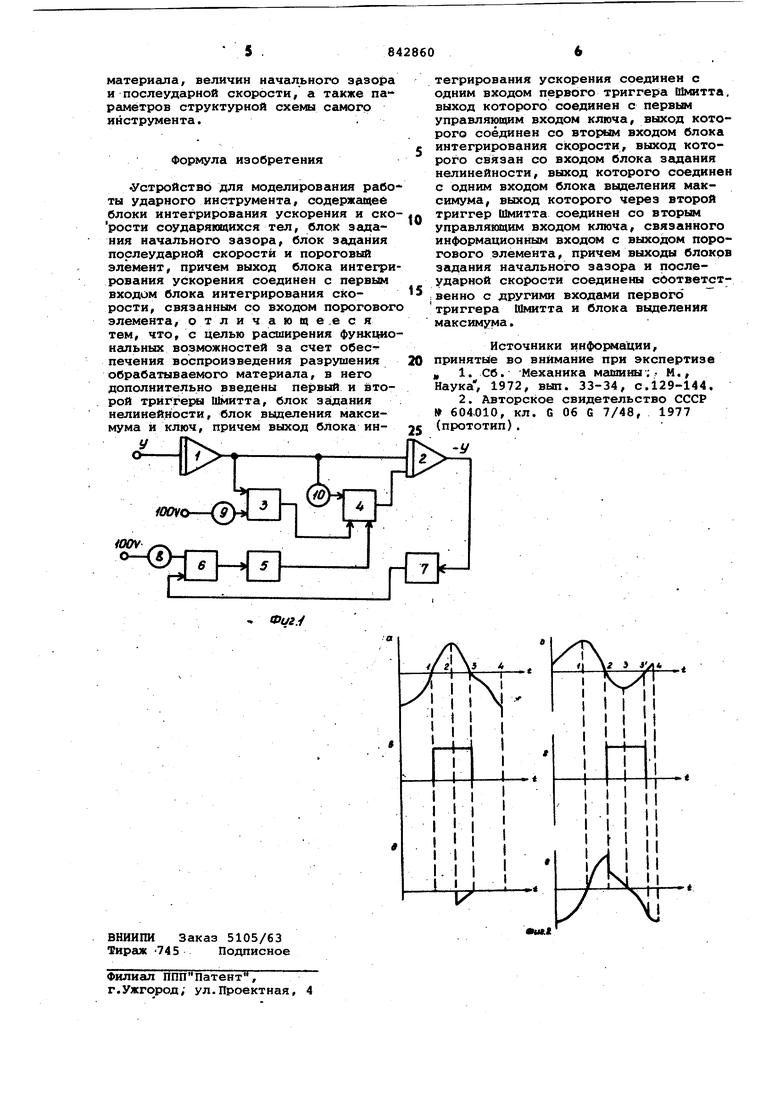
На фиг. 1 показана структурная схема устройства; на фиг, 2 - график выходных напряжений блоков структурной схемы.
Устройство содержит блок 1 интегрирования ускорения, блок 2 интегрирования скорости, первый триггер РЛмитта 3, ключевой элемент 4, второй триггер Шмитта 5, блок 6 выделения, максимума, блок 7 задания нелинейности, блок 8 задания начального зазора,блок 9 задания послеударной скорости и пороговый элемент 10.
Устройство работает следующим образом. .
Сигнал, пропорциональный ускорению соударяющихся тел у, подается на вход бло.ка 1, на выходе которого получается напряжение, показанное на фиг. 2а. При этом график перемещения у имеет вид, показанный на фиг. 26. Здесь на первом интервале (до точки 1) происходит раскачивание ударяющего тела под действием возмущакВДей силы и разгон (участок 1-2). В точке 2 ударяющее тело наносит по ударному телу удар, на участке 2-3 происходит смятие или разрушение ударяемого тела. В точке 3 соударяемые тела разделяются (при разрушающем воздействи;и) . При случае упругой деформадии с учетом остаточных явлений разделение может произойти в любой точке участка 3-3, в эависимос.ти от материала соударяющихся тел. После приведенной последовательности весь процесс повторяется. На выходе триггера Шмитта 3 образуется сигнал, приведенный на фиг. 2в, важной характеристикой, которого является момент спада напряжения в точке 3, соответ ствующее переходу напряжения на. графике 2а через нуль. Таким образом, получаем закрывающий сигнал на перво управляющем входе ключевого элемента 4 ...
О,Т1 рывающий сигнал на втором управляющем входе ключевохю элемента следующим образом,
Н4-вход блока нелинейности, подае ся сигнал перемещения у, в результате благодаря введению характеристики ударяемого материала посредство блока 7,удается получить момент разъединения соударяющихся тел, обозначенный на графике 26 точкой 3, Следовательно, напряжение с выхода блока 7 проходит через блок б вьщёления максимума, создающего требуемый
порог срабатывания, поступает на вход триггера Имитта 5, который выдает управляющий сиг-нал, показанный на фиг. 3г. Здесь важным является момент нарастания напряжения (точка 2 на f фиг. 26), который происходит в момент удара тел.
Ключевой элемент открываетсяв момент 2 от сигнала, поступающего с выхода второго триггера Шмитта 5 и
л закрывается в момент времени 3 от
сигнала, поступающего с выхода первого триггера Шмитта 3. И на второй вход блока интегрирования скорости 2 пройдет напряжение, соответствующее фиг. 2д, которое, складываясь
5 с выходным напряжением блока 1 интегрирования ycкopeния даст скорость соударяющихся тел.
Разрыв функции скорости в точке 2 (фиг. 2е) объясняется падением скорости ударяющего тела при ударе, а также потерей кинематической энергии при деформации ударяемого тела и зависит от соотношения масс срударяемых тел. Величина разрыва устанавливается пороговым элементом 10 коэффициент передачи которого определяется по закону сохранения количества движения системы
(m,4mi),, И)
/ . .
М - масса ударяющего тела; М,, - масса ударяемого тела; у - скорость ударяемого тела
в момент удара;
у .- начальная скорость совместного движения соударяемых тел при ударе.
у , О ,
тогда
Ю
Величина у получается в результате суммирования напряжения, изображающего ур с напряжением И на выходе ключевого элемента 4 или
(з;
, (4;
тогда и коэффициент передачи порогового элемента 10 равен .
Задание величины начального зазора осуществляется блоком 8. Задание величины послеударной скорости производится блоком 9.
Величина длительности выходного сигнала триггера Шмитта 5 соответствует времени соприкосновения соударяющихся тел.
Таким образом, предлагаемое устройство позволяет исследовать поведение ударного инструмента в зависимости от характера обрабатываемого
