(54) ПЕРЕНОСНАЯ МОТОРНАЯ ПИЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Переносная моторная пила | 1976 |
|
SU844278A1 |
| Переносная моторная пила | 1980 |
|
SU880719A1 |
| Переносная моторная пила | 1980 |
|
SU874336A1 |
| Переносная моторная пила | 1974 |
|
SU519321A1 |
| Переносная моторная пила | 1989 |
|
SU1717348A1 |
| Переносная моторная пила | 1979 |
|
SU738875A1 |
| Переносная моторная пила | 1980 |
|
SU885012A1 |
| Переносная моторная пила | 1980 |
|
SU939187A1 |
| Переносная моторная пила | 1979 |
|
SU793759A1 |
| Переносная моторная пила | 1981 |
|
SU939188A1 |
Изобретение относится к переносным моторным пилам и может быть использовано в леской промышленности .
Известна переносная мотопила, включающая опорную раму с рукоятками управления, бензобак, пильный аппарат, двигатель и амортизаторы, соединякадие опорную раму с двигателем 11.
Недостатком известного устройства является возникновение гидроскопических моментов при манипулировани1| МОТОПИЛОЙ в пространстве, что ухудшает управляемость мотопилой и Увеличивает спектр собственных чаетот системы, ухудшая виброизоляцию рукояток управления.
Наиболее близкой по технической сущности к предлагаемой является переносная моторная пила, включающая опорную раму с рукоятками управления, бензобак, пильный аппарат, двигатель, коленчатый вал и маховик, которые установлены соосно и связаны между собой посредством конического паразитного колеса, и амортизаторы, соединяющие опорную раму с двигателем. Это устройство позволяет уменьшить влияние гидроскопического момента и улучшить управляемость мотопилой 2.
Однако к числу недостатков этой мотопилы следует отнести значительный вес маховика, который необходим для обеспечения заданной неравномерности вреадения коленчатого вала двигателя, что уменьшает удобство эксплуатации мотопилы. °
Цель изобретения - снижение веса маховика без ухудшения неравномерности вршчения коленчатого вгша.
Поставленная цель достигается тем, что оси вртчения паразитного колеса и маховика расположены параллельно.
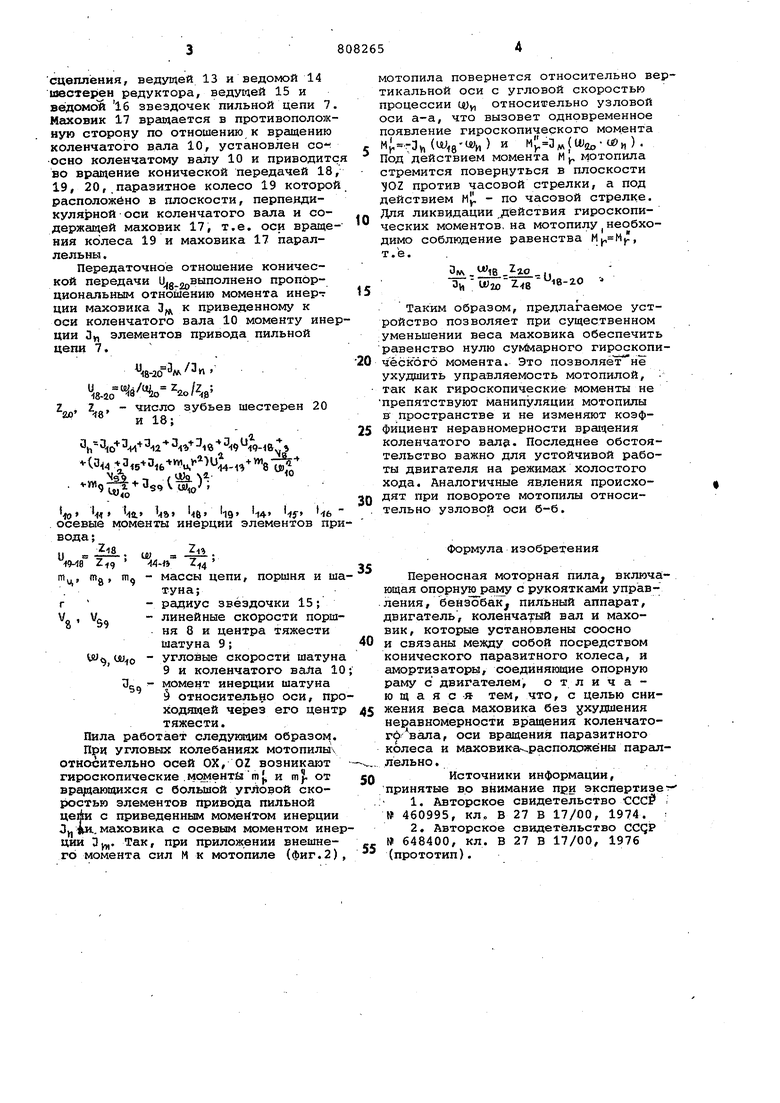
На фиг. 1 изображена переносная моторная пила, общий вид на фиг. 2схема действия гироскопических моментов на мотопилу.
Мотопила включает двигател,ь 1, жестко соединенный с пильным аппаратом 2, опорную раму 3 с жестко соединенными рукоятками 4 и бензобаком 5, амортизаторы 6, соединяющие двигатель 1 с опорной рамой 3. Привод пильной цепи 7 осуществляется двига.телем 1, состоящим из поршня 8-,, шатуна 9, коленчатого вала 10, ведуще.го 11 и ведомого 12 элементов муфты сцепления, ведущей 13 и ведомой 14 шестерен редуктора, ведущей 15 и ведомой 16 звездочек пильной цепи 7 Маховик 17 вращается в противополож ную сторону по отношению к вращению коленчатого вала 10, установлен соосно коленчатому валу 10 и приводит во вращение конической передачей 18 19, 20,.паразитное колесо 19 которо расположёно в плоскости, перпендикулярной оси коленчатого вала и содержащей маховик 17, т.е. оси враще ния колеса 19 и маховика 17 параллельны . Передаточное отношение конической передачи и д выполнено пропорциональным отнон1ению момента инерт ции маховика 3 к приведенному к оси коленчатого вала 10 моменту ине ции 0„ элементов привода пильной цепи 7, H8-гo 8 0/.8 z 2„, - число зубьев шестерен 20 и 18; VW3.(9.Vie;, ,j,w,v-MuJ,.,+vUg- N. -, f yk W « Ma. M& 49 14 -16 осевые моменты инерции элементов пр вода 5 18 . ,., 2, -fwa - массы цепи, поршня и ш туна; -радиус звездочки 15; 99 -линейные скорости порш ня 8 и центра тяжести Шатуна 9; t) Що угловые скорости шатун 9 и коленчатого вала 1 Ugg момент инерции шатуна § относительно оси, пр ходящей через его цент тяжести. Пила работает следующим образом. При угловых колебаниях мотопилыу относительно осей ОХ, OZ возникают гироскопические .мтаментйт}, и mj. от вра даюпшхся с большой угЛовой скоростью элементов привода пильной цейи с приведенным моментом инерции Лу, и. маховика с осевым моментом ине ции Зу„. Так, при приложении внешнего момента сил М к мотопиле (фиг.2 мотопила повернется относительно вертикальной оси с угловой скоростью процессии UDy, относительно узловой оси а-а, что вызовет одновременное появление гироскопического момента м|,.-Зу,() и ()Под действием момента М мотопила стремится повернуться в плоскости 02 против часовой стрелки, а под действием hj, - по часовой стрелке. Для ликвидации действия гироскопических моментов, на мотопилу необходимо соблюдение равенства , . IB го U)2oZ« e-20 Таким образом, предлагаемое устройство позволяет при существенном уменьшении веса маховика обеспечить равенство нулю суммарного гироскопического момента. Это позволяё н ухудшить управляемость мотопилой, . так как гироскопические моменты не препятствуют манипуляции мотопилы ВТ пространстве и не изменяют коэффициент неравномерности вршчения коленчатого вале. Последнее обстоятельство важно для устойчивой работы двигателя на режимах холостого хода. Аналогичные явления происходят при повороте мотопилы относительно узловой оси б-б. Формула изобретения Переносная моторная пилa включающая опорну1о раму с рукоятками управления, 6eH3o6aKj пильный аппарат, двигатель, коленчатый вал и маховик, которые установлены соосно и связаны мезкду собой посредством конического паразитного колеса, и амортизаторы/ соединяющие опорную раму с двигателем, отличающаяся тем, что, с целью снижения веса маховика без ухудшения неравномерности вращения коленчатогб вала, оси вращения паразитного колеса и маховика расположёны параллельно. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство CCCi ; № 460995, кл, В 27 В 17/00, 1974. 2.Авторское свидетельство CCQ3P № 648400, кл. В 27 В 17/00, 1976 (прототип).
/ V Т V
jf J 2 JO
