1
Изобретение относится к области транспортного машиностроения, преимущественно к производству и испытаниям гусеничных транспортных средств.
Известен способ управления натяжением гусеничного обвода, заключающегося в том, что определяют натяжение гусеничного обвода с одной стороны тягового элемента и крутящий момент на оси тягового элемента и формируют сигнал управления натяжением обвода 1.
Указанный способ обеспечивает постоянное натяжение обвода, однако он сложен, поскольку требует применения громоздкой аппаратуры для определения крутящего момента на оси тягового элемента.
Известен также способ управления натяжением реверсивного тягового обвода, заключающийся в том, что определяют натяжение ветви обвода с одной стороны от ведущего элемента, формируют сигнал, пропорциональный натяжению, и подают его в систему управления 2.
С помощью этого способа обеспечивается создание простого устройства для управления натяжением тягового обвода, однако точность управления натяжением при этом способе недостаточно высока, так как используют только сигнал, снимаемый с одной стороны от ведущего элемента.
Целью изобретения является повыщение управления натяжением обвода.
Цель достигается тем, что определяют натяжение ветви обвода с другой стороны 5 от ведущего элемента и формируют сигнал, пропорциональный этому натяжению, а в систему управления подают сигнал, пропорциональный наименьшему значению из указанных двух сигналов.
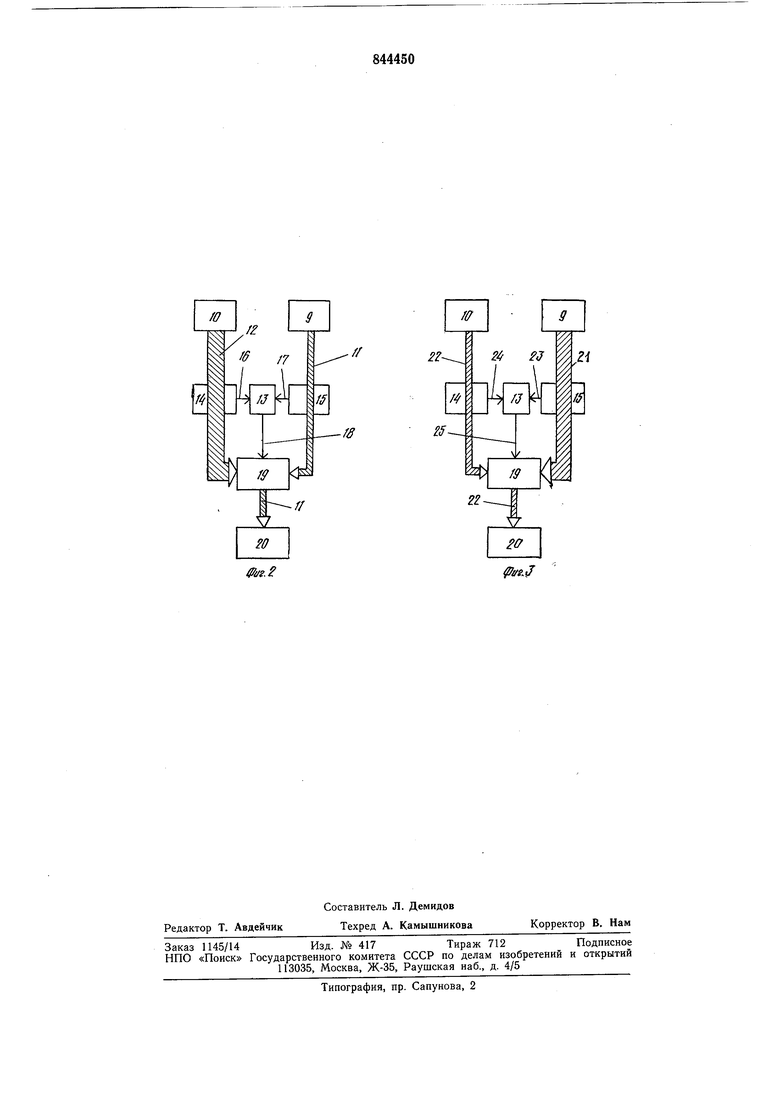
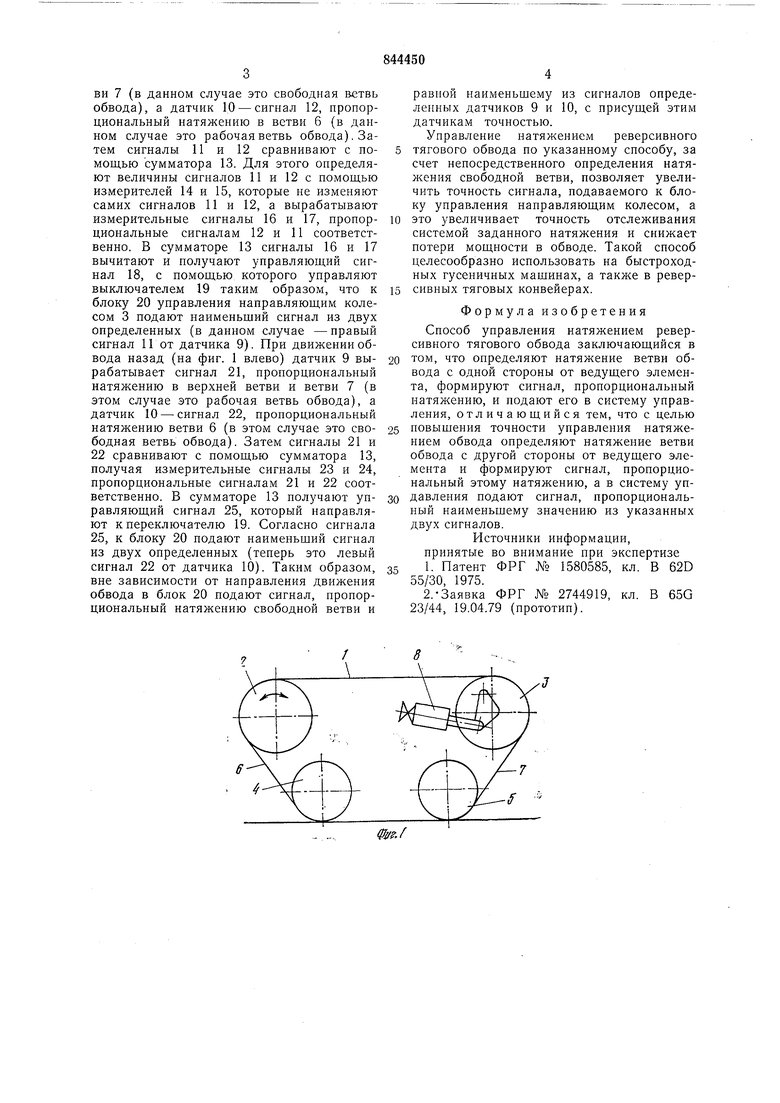
10 На фиг. 1 изображена схема обвода; на фиг. 2 - структурная схема системы управления натяжением при движении обвода вперед; на фиг. 3 - то же, при движении обвода назад.
15 В реверсивном тяговом обводе, состоящем из гусеницы 1, огибающей ведущее колесо 2, направляющее колесо 3, опорные катки 4 и 5, производят одновременное ой- рёделение натяжения ветви 6, 7 и верхней
20 ветви обвода по обе стороны от ведущего колеса 2. Натяжение в верхней ветви и ветви 7 определяют путем замера давления в гидроцилиндре 8 направляющего колеса 3 с помощью датчика 9. Определение
25 натяжения наклонной ветви 6 производят измерительным устройством (на чертежах не показано), с помощью датчика 10. При движении обвода вперед (на фиг. 1 вправо) датчик 9 вырабатывает сигнал И, про30 порциональный натяжению в верхней ветви 7 (в данном случае это свободная ветвь обвода), а датчик 10 -сигнал 12, пропорциональный натяжению в ветви 6 (в данном случае это рабочая ветвь обвода). Затем сигналы 11 и 12 сравнивают с помощью сумматора 13. Для этого определяют величины сигналов 11 и 12 с помощью измерителей 14 и 15, которые не изменяют самих сигналов 11 и 12, а вырабатывают измерительные сигналы 16 и 17, пропорциональные сигналам 12 и И соответственно. В сумматоре 13 сигналы 16 и 17 вычитают и получают управляющий сигнал 18, с помощью которого управляют выключателем 19 таким образом, что к блоку 20 управления направляющим колесом 3 подают паименьший сигнал из двух определенных (в данном случае - правый сигнал 11 от датчика 9). При движении обвода назад (на фиг. 1 влево) датчик 9 вырабатывает сигнал 21, пропорциональный натяжению в верхней ветви и ветви 7 (в этом случае это рабочая ветвь обвода), а датчик 10 -сигнал 22, пропорциональный натяжению ветви 6 (в этом случае это свободная ветвь обвода). Затем сигналы 21 и 22 сравнивают с помощью сумматора 13, получая измерительные сигналы 23 и 24 пропорциональные сигналам 21 н 22 соответственно. В сумматоре 13 получают управляющий сигнал 25, который направляют к переключателю 19. Согласно сигнала 25, к блоку 20 подают наименьший сигнал из двух определенных (теперь это левый сигнал 22 от датчика 10). Таким образом, вне зависимости от направления движения обвода в блок 20 подают сигнал, пропорциональный натяжению свободной ветви и равной наименьшему из сигналов определенных датчиков 9 и 10, с присущей этим датчикам точностью. Управление натяжением реверсивного тягового обвода по указанному способу, за счет непосредственного определения натяжения свободной ветви, позволяет увеличить точность сигнала, подаваемого к блоку управления направляющим колесом, а это увеличивает точность отслеживания системой заданного натяжения и снижает потери мощности в обводе. Такой способ целесообразно использовать на быстроходных гусеничных машинах, а также в реверсивных тяговых конвейерах. Формула изобретения Способ управления натяжением реверсивного тягового обвода заключающийся в том, что определяют натяжение ветви обвода с одной стороны от ведущего элемента, формируют сигнал, пропорциональный натяжению, и подают его в систему управления, отличающийся тем, что с целью повышения точности управления натяжением обвода определяют натяжение ветви обвода с другой стороны от ведущего элемента и формируют сигнал, пропорциональный этому натяжению, а в систему упав ления подают сигнал, пропорциональый наименьшему значению из указанных вух сигналов. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ № 1580585, кл. В 62D 5/30, 1975. 2.3аявка ФРГ № 2744919, кл В 65G 3/44, 19.04.79 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГУСЕНИЧНЫЙ ТРАНСПОРТЕР | 2003 |
|
RU2260541C2 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| Устройство для автоматического регулирования натяжения гусеничной цепи | 1979 |
|
SU948739A1 |
| Устройство для обеспечения работоспособности ходовой части гусеничной машины | 2015 |
|
RU2620180C1 |
| Способ автоматического управления натяжением тягового органа двухприводного скребкового конвейера | 2022 |
|
RU2801914C1 |
| Стенд для исследования гусеничных движителей | 1980 |
|
SU871026A2 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 1991 |
|
RU2033363C1 |
| ПРОМЫШЛЕННЫЙ ТРАКТОРНЫЙ АГРЕГАТ С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2014 |
|
RU2550867C1 |
| РОБОТИЗИРОВАННАЯ ПЛАВАЮЩАЯ МАШИНА | 2018 |
|
RU2714551C1 |
| Стенд для испытания транспортных средств | 1987 |
|
SU1462142A1 |