Изобретение относится к военным гусеничным машинам, в частности к ходовой части гусеничной машины, оснащенной механизмом натяжения гусениц.
Ходовая часть гусеничных машин является системой, состоящей из гусеничного движителя и подвески. В гусеничный движитель входят две гусеницы, два ведущих колеса, два направляющих колеса с механизмами натяжения гусениц, двенадцать опорных катков, десять поддерживающих катков. В состав каждого механизма натяжения гусениц правого и левого борта входит кривошип, червячное колесо, червяк и стопор червяка.
В состав подвески входит двенадцать торсионных валов, двенадцать балансиров и шесть гидроамортизаторов.
Предлагаемое устройство дополнительно имеет силовую часть механизма натяжения гусениц состоящую из блока управления, электродвигателя, соединенного с червяком и электромагнитом стопора червяка. Также дополнительно два ведущих колеса, два направляющих колеса, двенадцать опорных катков, десять поддерживающих катков оснащены датчиками, измеряющими их угловую скорость, двенадцать торсионных валов, оснащены датчиками перемещения, шесть гидроамортизаторов оснащены датчиками давления жидкости, червячные колеса оснащены датчиками колебания, и при этом все датчики соединены с блоком приема и обработки информации.
Высокий уровень скоростей удельных мощностей позволяет получить высокие максимальные и средние скорости гусеничных машин на местности. Однако реализация этих показателей ограничивается большими потерями момента при неполном пятне контакта ведущего колеса и гусеничного обвода. Также результаты изменения характеристик ходовой части необходимо использовать для ее диагностики.
Для обеспечения гусеничного обвода при ограниченных затратах мощности на функционирование необходимо управлять натяжением гусениц в зависимости от дорожно-грунтовых условий. Для исключения сброса гусениц с ведущих колес и ограничения схода опорных катков с гусениц в процессе движения необходимо увеличивать натяжение гусениц. Изменение натяжения также необходимо при движении по пересеченной местности, для стабилизации волновых процессов, возникающих в свободных ветвях гусениц, и обеспечения долговечности движителя.
Известна конструкция механизма натяжения гусениц транспортной машины, состоящей из силовой части и гидросистемы (Боевые машины десанта БМД-1, М.: Воениздат, 1973 г., рис. 124-127, с 288-294, аналог). Конструкция механизма позволяет синхронно или раздельно регулировать натяжение обеих гусениц при изменении клиренса или сопротивлению движению. Недостатком является отсутствие регулирования натяжением гусениц при поворотах.
Близкой к изобретению является конструкция механизма автоматического натяжения гусениц транспортной машины (патент №137536). Конструкция содержит силовую часть и золотниковую коробку. В автоматическом режиме регулирование натяжением гусениц происходит с помощью гидропривода по сигналу, поступающему от штурвала транспортной машины. Выявление поперечных колебаний гусениц осуществляется с помощью датчиков давления жидкости, расположенных в исполнительных цилиндрах механизма натяжения гусениц. Недостатком этой конструкции является трудность размещения гидросистемы в корпусе машины. Кроме того, в обеих конструкциях будет наблюдаться чрезмерное натяжение гусениц.
Также в обеих конструкциях не учитывается работа подвески при движении. Результаты работы ходовой части при движении не анализируются.
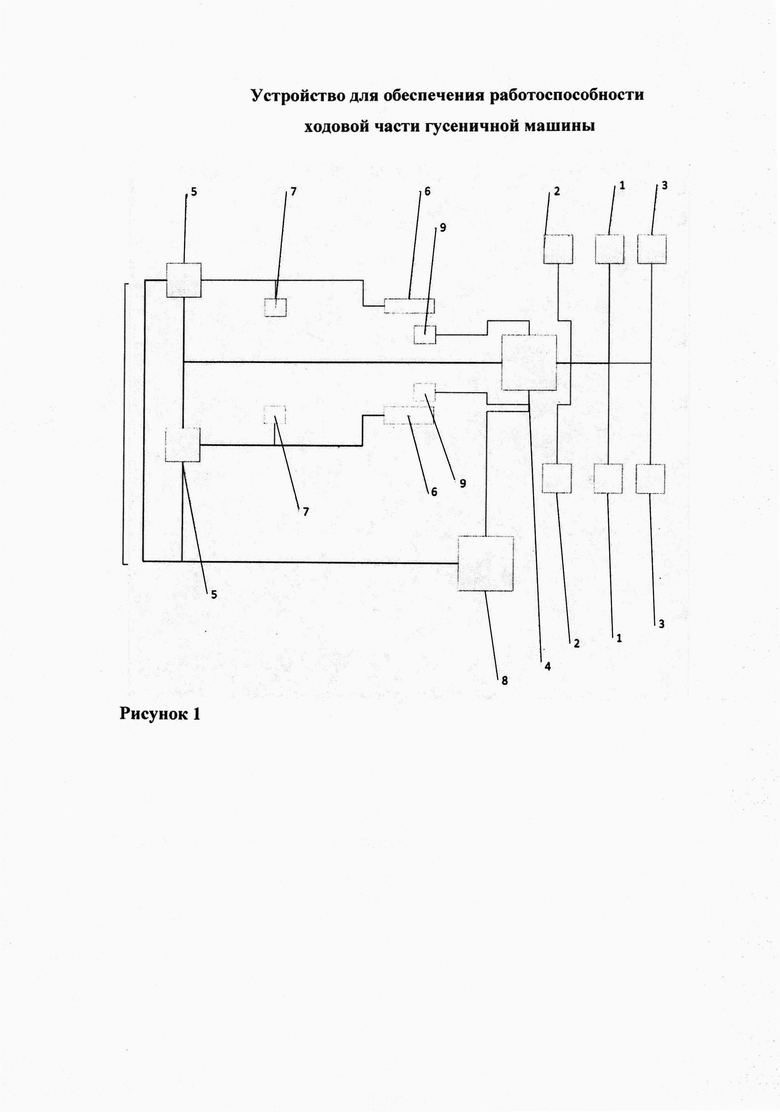
Предлагаемая конструкцию с устройством для обеспечения работоспособности ходовой части гусеничной машины приведена на рис. 1. Она содержит двадцать шесть датчиков вращения ведущих, направляющих, поддерживающих, опорных катков гусеничного движителя (1), двенадцать датчиков перемещения торсионных валов подвески (2), шесть датчиков давления жидкости в гидроамортизаторах (3), блок приема и обработки информации (4), блоки управления силовой части (5), электродвигатели червяка (6), электромагниты стопора червяка (7), запоминающее устройство (8), датчики колебания червячного колеса (9), соединительные кабели.
Описание работы изобретения
При движении машины в зависимости от изменения дорожно-грунтовых условий - сопротивления движению, от направления движения, поворотов машины, от датчиков угловой скорости вращения ведущих, опорных, поддерживающих, направляющих катков 1, датчиков перемещения торсионных валов 2, датчиков давления жидкости в гидроамортизаторах 3 передается электрический сигнал на блок приема и обработки информации 4, при изменении характеристик ходовой части и необходимости регулирования натяжения гусениц электрический сигнал с блока приема и обработки информации передается на блоки управления силовой частью 5. С блока управления силовой частью 5 передается сигнал на электромагнит стопора червяка, который перемещает стопор, вместе с этим подается необходимый электрический сигнал на электродвигатель червяка, который проворачивает червяк на необходимый угол, тем самым воздействуя через червячное колесо на кривошип. Выполнив необходимый поворот, червяк становится на стопор.
Блоком приема и обработки информации непрерывно ведется мониторинг возникновения поперечных волновых процессов в ветвях гусениц, на основе анализа изменения угловых скоростей катков и колебательных процессов на червячном колесе. Для гашения волновых процессов электрической сигнал с блока приема и обработки информации передается на блоки управления силовой частью 5. С блока управления силовой частью 5 передается сигнал на электромагнит стопора червяка, который перемещает стопор, вместе с этим подается необходимый электрический сигнал на электродвигатель червяка, который проворачивает червяк на необходимый угол, тем самым воздействуя через червячное колесо на кривошип.
Вся информация с блока приема и обработки информации и блоков управления силовой части механизма натяжения гусениц сохраняется на запоминающем устройстве.
Эффективность данной системы заключается в том, что конструкция данного устройства обеспечивает информацией об угловых скоростях ведущих, направляющих, поддерживающих, опорных катков, о перемещении торсионных валов, давлении в гидроамортизаторах. Одним из результатов обработки этой информации является электрический сигнал на блок управления для регулирования натяжения гусениц в ходе движения. Результаты регулировки также сохраняются в запоминающем устройстве. Запоминающее устройство сохраняет информацию и имеет базу данных о параметрах работы ходовой части. Используя всю эту информацию, можно спрогнозировать процесс изменения характеристик ходовой части в будущем и определить ее остаточный ресурс.
Таким образом, все это позволит:
1) повысить запас устойчивости гусеничного обвода, долговечность деталей движителя;
2) максимально использовать ресурс ходовой части, предотвратить преждевременную отправку в ремонт, исключить работы на проведение диагностических работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБКАТКИ ГУСЕНИЧНЫХ ЛЕНТ НА СТЕНДЕ (ВАРИАНТЫ) | 2010 |
|
RU2423681C1 |
| УНИВЕРСАЛЬНОЕ ГУСЕНИЧНОЕ ШАССИ НА ЕДИНОЙ ПЛАТФОРМЕ | 2009 |
|
RU2433934C2 |
| ГУСЕНИЧНЫЙ ТРАНСПОРТЕР | 2003 |
|
RU2260541C2 |
| МНОГОЦЕЛЕВОЕ ГУСЕНИЧНОЕ ШАССИ | 2008 |
|
RU2403528C2 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2268839C9 |
| БОЕВАЯ МАШИНА ДЕСАНТА | 2001 |
|
RU2223460C2 |
| Стенд для исследования гусеничных движителей | 1980 |
|
SU871026A2 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2004 |
|
RU2279371C2 |
| Устройство для контроля и управления вооружением военной гусеничной машины | 2016 |
|
RU2615226C1 |
| ХОДОВАЯ ЧАСТЬ ГУСЕНИЧНОГО ТРАКТОРА | 1999 |
|
RU2162629C2 |
Изобретение относится к военным гусеничным машинам, в частности к ходовой части гусеничной машины, оснащенной механизмом натяжения гусениц. Устройство для обеспечения работоспособности ходовой части гусеничной машины, состоящей из гусеничного движителя, включающего в себя гусеницы, ведущие колеса, направляющие колеса с механизмами натяжения гусениц, опорные катки, поддерживающие катки, подвеску, в которую входят торсионные валы, балансиры и гидроамортизаторы, а в состав каждого механизм натяжения гусениц правого и левого борта входит кривошип, червячное колесо, червяк и стопор червяка. Механизм натяжения гусениц имеет силовую часть, состоящую из блока управления, электродвигателя червяка, электромагнита стопора червяка. Ведущие колеса, направляющие колеса, опорные катки, поддерживающие катки оснащены датчиками, измеряющими их угловую скорость. Торсионные валы оснащены датчиками перемещения. Гидроамортизаторы оснащены датчиками давления жидкости. Червячные колеса оснащены датчиками колебания. Все датчики соединены с блоком приема и обработки информации, соединенным с блоком управления силовой частью механизма натяжения гусениц, и с запоминающим устройством. Достигается повышение срока службы деталей движителя. 1 ил.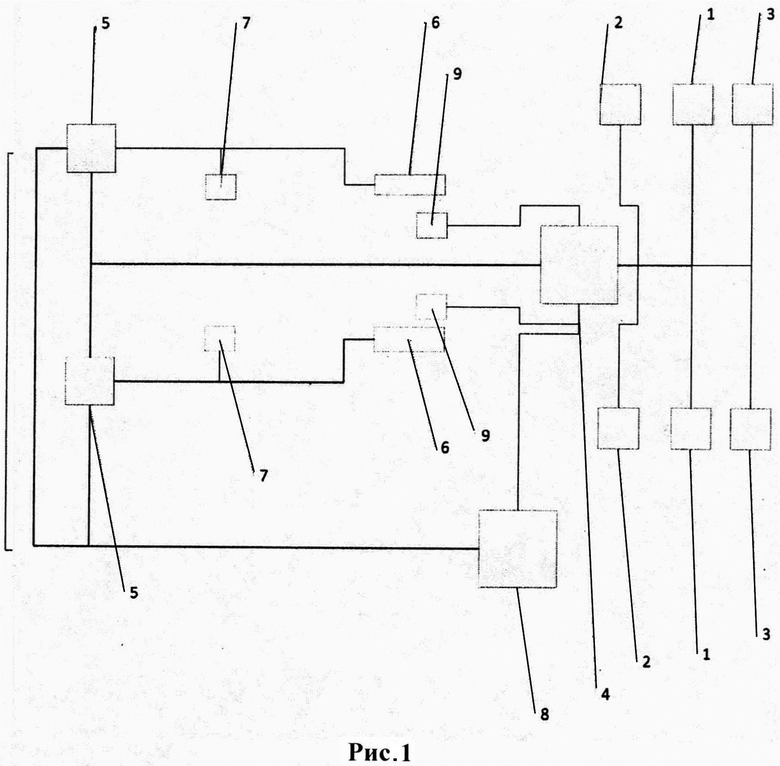
Устройство для обеспечения работоспособности ходовой части гусеничной машины, которая состоит из гусеничного движителя, включающего в себя две гусеницы, два ведущих колеса, два направляющих колеса с механизмами натяжения гусениц, двенадцать опорных катков, десять поддерживающих катков, подвески, в которую входит двенадцать торсионных валов, двенадцать балансиров и шесть гидроамортизаторов, а в состав каждого механизма натяжения гусениц правого и левого борта входит кривошип, червячное колесо, червяк и стопор червяка, отличающееся тем, что механизм натяжения гусениц имеет силовую часть, состоящую из блока управления, электродвигателя червяка, электромагнита стопора червяка, два ведущих колеса, два направляющих колеса, при этом двенадцать опорных катков и десять поддерживающих катков оснащены датчиками, измеряющими их угловую скорость, двенадцать торсионных валов оснащены датчиками перемещения, шесть гидроамортизаторов оснащены датчиками давления жидкости, червячные колеса оснащены датчиками колебаний, а все датчики соединены с блоком приема и обработки информации, который соединен с блоком управления силовой частью механизма натяжения гусениц, и с запоминающим устройством.
| ПОГЛОЩАЮЩИЙ АППАРАТ АВТОСЦЕПНОГО УСТРОЙСТВА ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНЫХ ДОРОГ | 0 |
|
SU137536A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2534128C1 |
| JP H04361749 A, 15.12.1992 | |||
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВОЗДУХА | 0 |
|
SU277447A1 |
| US 5287938 A, 22.02.1994. | |||

