1
Изобретение относится к конструк- цчям транспортных средств высокой проходимости, а более точно к шагающим машинам.
Известно шагающее транспортное средство, содержащее корпус с побортно расположенными ортогональными шагающими опорами, каждая из которых имеет индивидуальные приводы для возвратно-поступательных перемещений в горизонтальной и вертикальной плоскостях 1 .
Недостатком его является отсутствие адаптации шагающих опор к неровностям пути и связанные с этим их удары о з«млю при ходьбе.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является другое известное транспортное средство повышенной проходимости, содержащее корпус с побортно расположенными шагающими опорами, каждая иэ которых имеет датчик касания с грунтом, привод возвратно-поступательных горизонтальных перемещений и аналогичный привод вертикальныхперемещений, состоящийг fi3 реверсивного двигателя и тормоза, цепи питания которых последовательно соединеныс источНИКОМ энергии через датчик касания 2 .
В этом транспортном средстве ада-птадия к рельефу пути происходит в результате .того, что при опускании опоры на грунт срабатывает датчик касания, отключающий и заггормгикиваю Щий привод вертикального перемещения Однако опора, опустившаяся на грунт
te без нагрузки и заторможения датчиком касания, вдавливается затем в землю весом наезжающего на корпуса, который при этом опускается вместе с опорой, при этом постановка
15 каждой следующей шагающей опоры сопровождается прогрессирующим опусканием корпуса. Поскольку упругость грунта под разрывными ногами может оказаться неодинаковой, корпус маши2Сны будет не только сползать, но и подвергаться продольным и поперечным перекосам - тангажам и кренам, в результате чего произойдет посадка корпуса на днище или его опрокидывание.
25
Целью изобретения является повышение безопасности движения путем регулирования крена, продольного наклона и клиренса.
Поставленная цель достигается .тем,
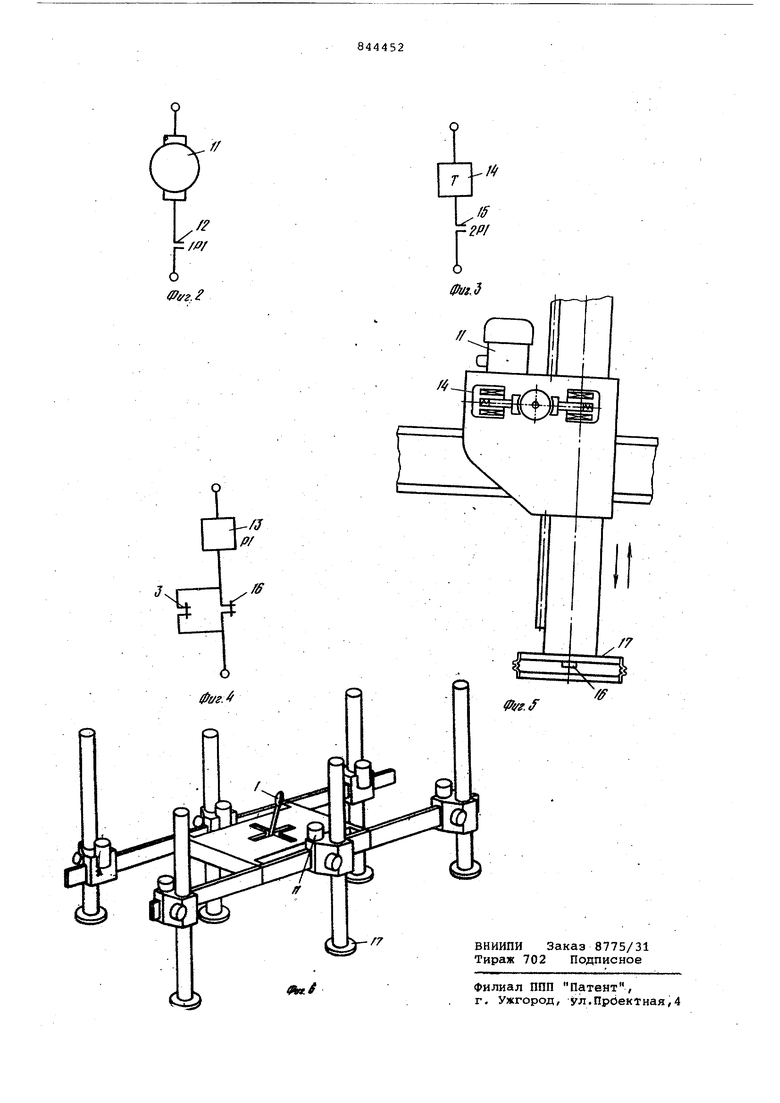
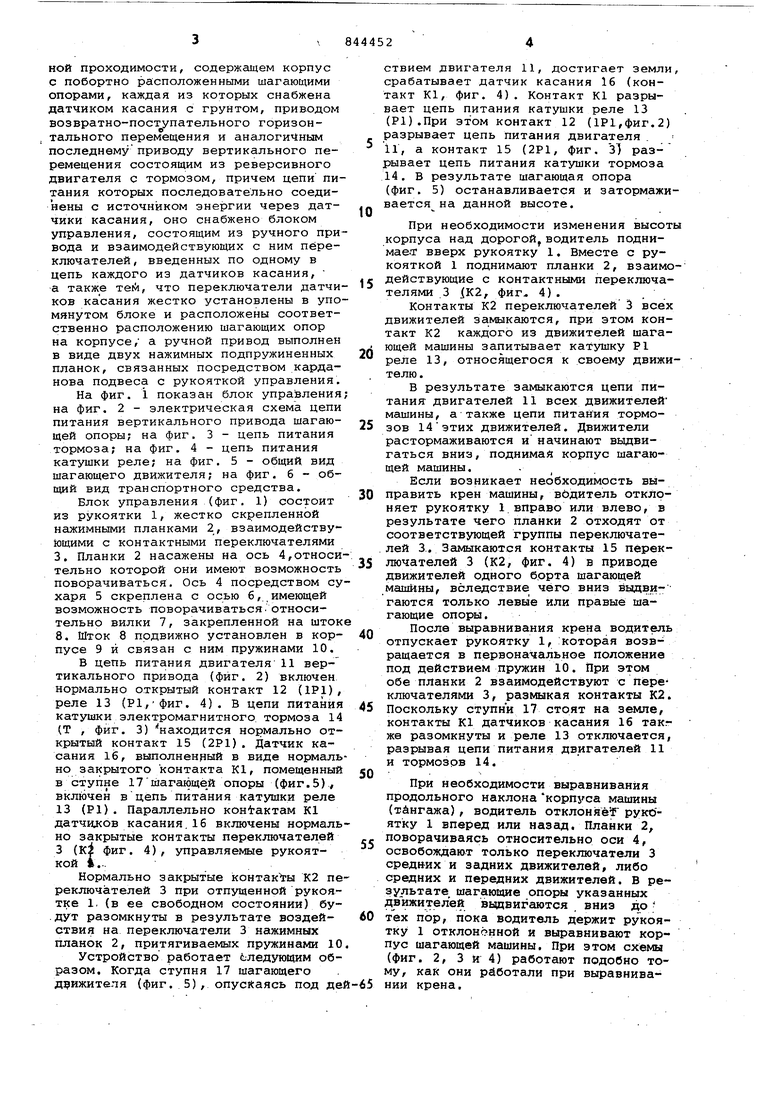
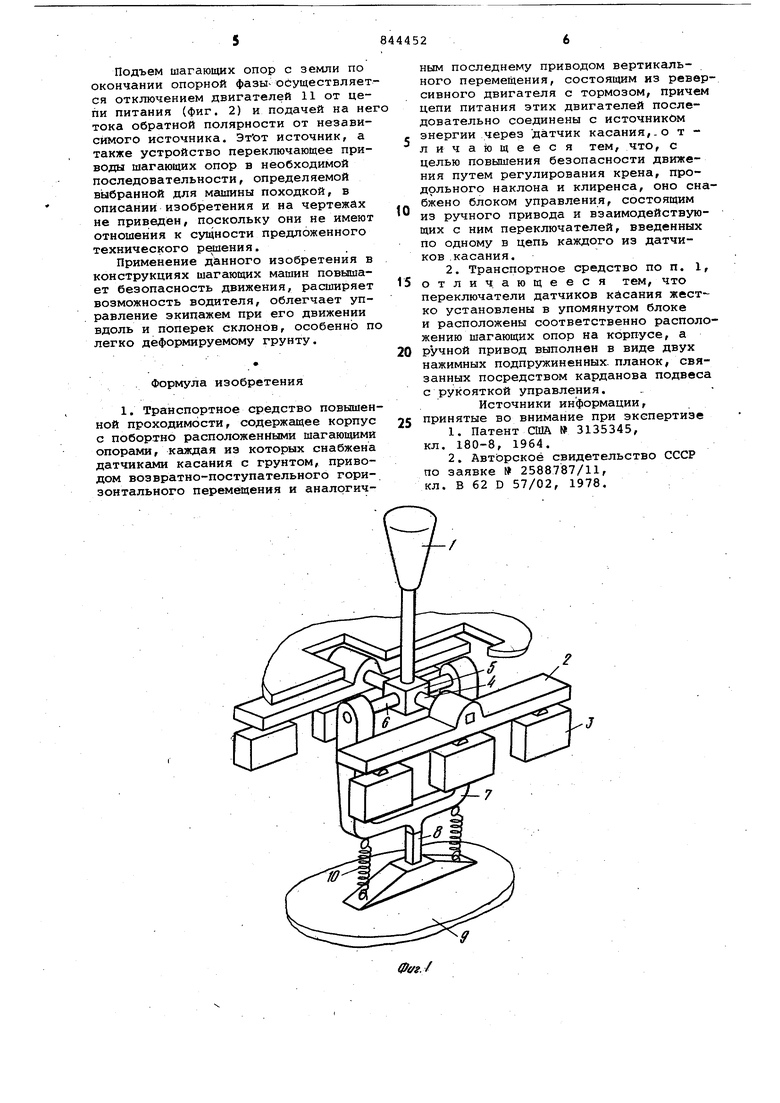
30 чтр л транспортном средстве повышенной проходимости, содержащем корпус с побортно расположенньоми шагающими опорами, каждая из которых снабжена датчиком касания с грунтом, приводом возвратно-поступательного горизонтального перемещения и аналогичным последнему приводу вертикального перемещения состоящим из реверсивного двигателя с тормозом, причем цепи питания которых последовательно соединены с источн1яком энергии через датчики касания, оно снабжено блоком управления, состоящим из ручного при вода и взаимодействующих с ним переключателей , введенных по одному в цепь каждого из датчиков касания, а также тей, что переключатели датчи ков касания жестко установлены в упо мянутом блоке и расположены соответственно расположению шагающих опор на корпусе/ а ручной привод выполнен в виде двух нажимных подпружиненных планок, связанных посредством карданова подвеса с рукояткой управления. На фиг. 1 показан блок управления на фиг, 2 - электрическая схема цепи питания вертикального привода шагающей опоры; на фиг, 3 - цепь питания тормоза; на фиг. 4 - цепь питания катушки реле; на фиг. 5 - общий вид шагающего движителя; на фиг. б - общий вид транспортного средства. Блок управления (фиг. 1) состоит из рукоятки 1, жестко скрепленной нажимными планками 2, взаимодействующими с контактными переключателями 3. Планки 2 насажены на ось 4,относи тельно которой они имеют возможность поворачиваться. Ось 4 посредством су харя 5 скреплена с осью 6, имеющей возможность поворачиваться.относительно вилки 7, закрепленной на шток 8. Шток 8 подвижно установлен в корпусе 9 и связан с ним пружинами 10. В цепь питания двигателя 11 вертикального привода (фиг. 2) включен нормально открытый контакт 12 (1Р1), реле 13 (Р1,фиг. 4). В цепи питания катушки электромагнитного тормоза 14 (Т , фиг. 3) находится нормально открытый контакт 15 (2Р1). Датчик касания 16, выполненный в виде нормаль но закрытого контакта К1, помещенный в ступне 17шагающе й опоры (фиг,5), вклйчен вцепь питания катушки реле 13 (Р1). Параллельно контактам К1 датчщ ов касания.16 включены нормаль но закрытые контакты переключателей 3 (к| фиг. 4), управляемые рукояткой 4... Нормально закрытые контак ы К2 пе реключа.телей 3 при отпущенной рукоятке 1. (в ее свободном состоянии) бу.дут разомкнуты в результате воздействия на переключатели 3 нажимных планок 2, притягиваемых пружинами 10 Устройство работает Следующим образом. Когда ступня 17 шагающего движителя (фиг. 5), опускаясь под де ствием двигателя 11, достигает земли, срабатывает датчик касания 16 (контакт К1, фиг. 4). Контакт К1 разрывает цепь питания катушки реле 13 (Р1),При зтом контакт 12 (1Р1,фиг,2) разрывает цепь питания двигателя 11, а контакт 15 (2Р1, фиг. 31 разрывает цепь питания катушки тормоза 14. В результате шагающая опора (фиг. 5) останавливается и затормаживается на данной высоте. При необходимости изменения высоты корпуса над дорогой водитель поднимае.т вверх рукоятку 1, Вместе с рукояткой 1 поднимают планки 2, взаимодействующие с контактными переключателями 3 iK2, фиг« 4), Контакты К2 переключателей 3 всех движителей замыкаются, при этом контакт К2 каждого из движителей шагающей машины запитывает катушку Р1 реле 13, относящегося к своему движителю, В результате замыкаются цепи питания двигателей 11 всех движителей машины, а также цепи питания тормозов 14этих движителей. Движители растормаживаются и начинают выдвигаться вниз, поднимая корпус шагающей машины, Если возникает необходимость выправить крен машины, водитель отклоняет рукоятку 1 вправо или влево, в результате чего планки 2 отходят от соответствующей группы переключателей 3., Замыкаются контакты 15 переключателей 3 (К2, фиг, 4) в приводе движителей одного борта шагающей машины, вследствие чего вниз выдвигаются только левые или правые шагающие опоры. После выравнивания крена водитель отпускает рукоятку 1, которая возвращается в первоначальное положение под действием пружин 10, При этом обе планки 2 взаимодействуют с переключателями 3, размыкая контакты К2, Поскольку ступни 17 стоят на земле, контакты К1 датчиков касания 16 такг же разомкнуты и реле 13 отключается, разрывая цепи питания двигателей 11 и тормозов 14, При необходимости выравнивания продольного наклона корпуса машины (тАнгажа) , водитель отклоняв: рукоятку 1 вперед или назад. Планки 2, поворачиваясь относительно оси 4, освобождают только переключатели 3 средних и задних движителей, либо средних и передних движителей, В результате шагающие опоры указанных движителей вьщвигаются вниз до тех пор, пока водитель держит рукоятку 1 отклоненной и выравнивают корпус шагающей машины. При этом схемы (фиг, 2, 3 и 4) работают подобно тому, как они работали при выравнивании крена. Подъем шагающих опор с земли по окончании опорной фазы- осуществляет ся отключением двигателей 11 от цепи питания (фиг. 2) и подачей на не тока обратной полярности от независимого источника. Этот источник, а также устройство переключающее приводы шагающих опор в необходимой последовательности, определяемой выбранной для машины походкой, в описании изобретения и на чертежах не приведен, поскольку они не имеют отношения к сущности предложенного технического радения. Применение данного изобретения в конструкциях шагающих машин повышает безопасность движения, расширяет возможность водителя, облегчает управление экипажем при его движении вдоль и поперек склонов, особенно п легко деформируемому грунту, Формула изобретения 1. Транспортное средство повышен ной проходимости, содержащее корпус с побортно расположенными шагающими опорами, каждая из которых снабжена датчиками касания с грунтом, приводом возвратно-поступательного горизонтального перемещения и аналргичным последнему приводом вертикального перемещения, состоящим из реверсивного двигателя с тормозом, причем цепи питания этих двигателей последовательно соединены с источником энергии через датчик касания,.о т л и чающееся тем, что, с целью повышения безопасности движения путем регулирования крена, продольного наклона и клиренса, оно снабжено блоком управления, состоящим из ручного привода и взаимодействующих с ним переключателей, введенных по одному в цепь каждого из датчиков .касания. 2. Транспортное средство по п. 1, отличающееся тем, что переключатели датчиков касания установлены в упомянутом блоке и расположены соответственно расположению шагающих опор на корпусе, а ручной привод выполнен в виде двух нажимных подпружиненных- планок, связанных посредством карданова подвеса с рукояткой управления. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3135345, кл. 180-8, 1964. 2.Авторское свидетельство СССР по заявке 2588787/11, кл. В 62 Р 57/02, 1978.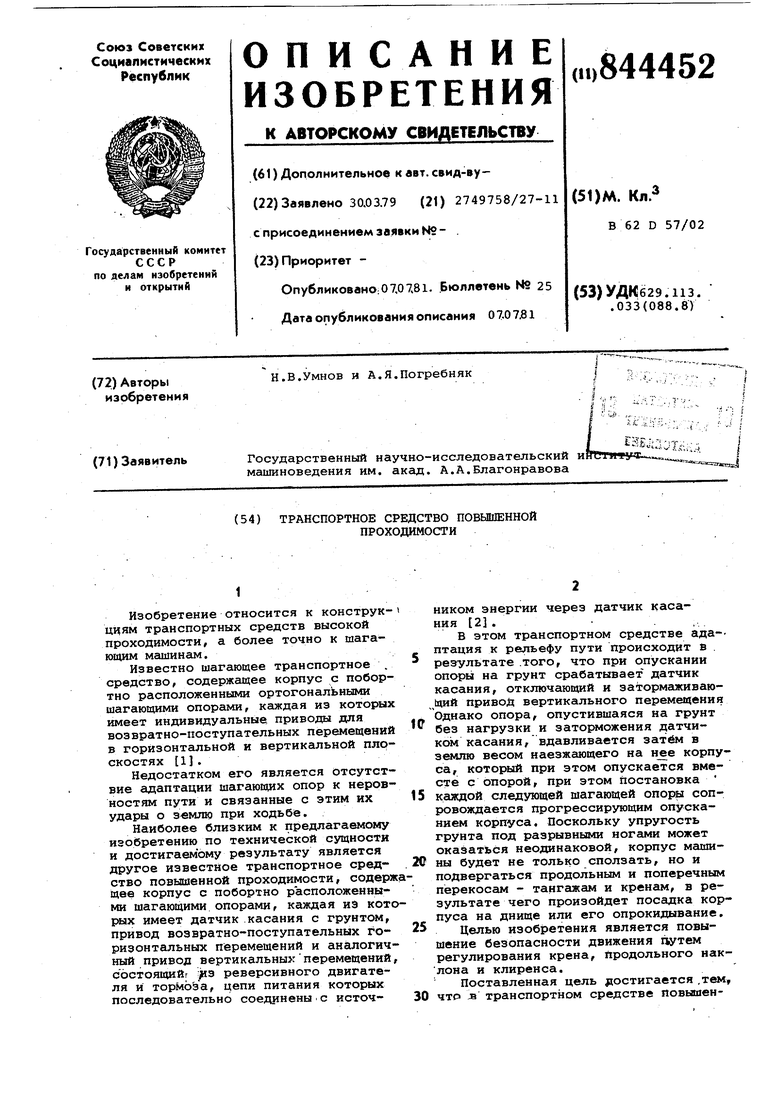
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления положением шагающего экипажа | 1977 |
|
SU765094A1 |
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
| ШАГАЮЩАЯ МАШИНА И СПОСОБ ЕЕ ШАГАНИЯ | 2009 |
|
RU2403166C1 |
| ШАГАЮЩАЯ ОПОРА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156712C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2003 |
|
RU2239577C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2153437C2 |
| Амфибийная дежурная шлюпка | 2023 |
|
RU2817306C1 |