I
Изобретение относится к транспорту, а именно к транспортным экипажам, работающим .в услозйях бездорожья, оснащенным движителями шагающего типа.
Известно устройство для управления положением щагающего экипажа при его пе- , ремещении по пересеченной местности, содержащее измеритель высоты и исполнительные механизмы 1.
Наиболее близким к описываемому изобретению по технической сущности и достигаемому результату является устройство для 10 управления положением щагающего экипажа с движителями ортогонального типа, содержащее датчики положения опор и привод вертикального перемещения 2.
Недостатком известных устройств является изменение клиренса в процессе работы устройства.
Цель изобретения - стабилизация клиренса.
Поставленная цель достигается тем, что в устройство для управления положением 20 щагающего экипажа с движителями ортогонального типа, имеющее датчики положения опор, введены сумматор длин выдвижения и счетчик числа опор, соединенный с
введенным делителем эталонных напряжений.
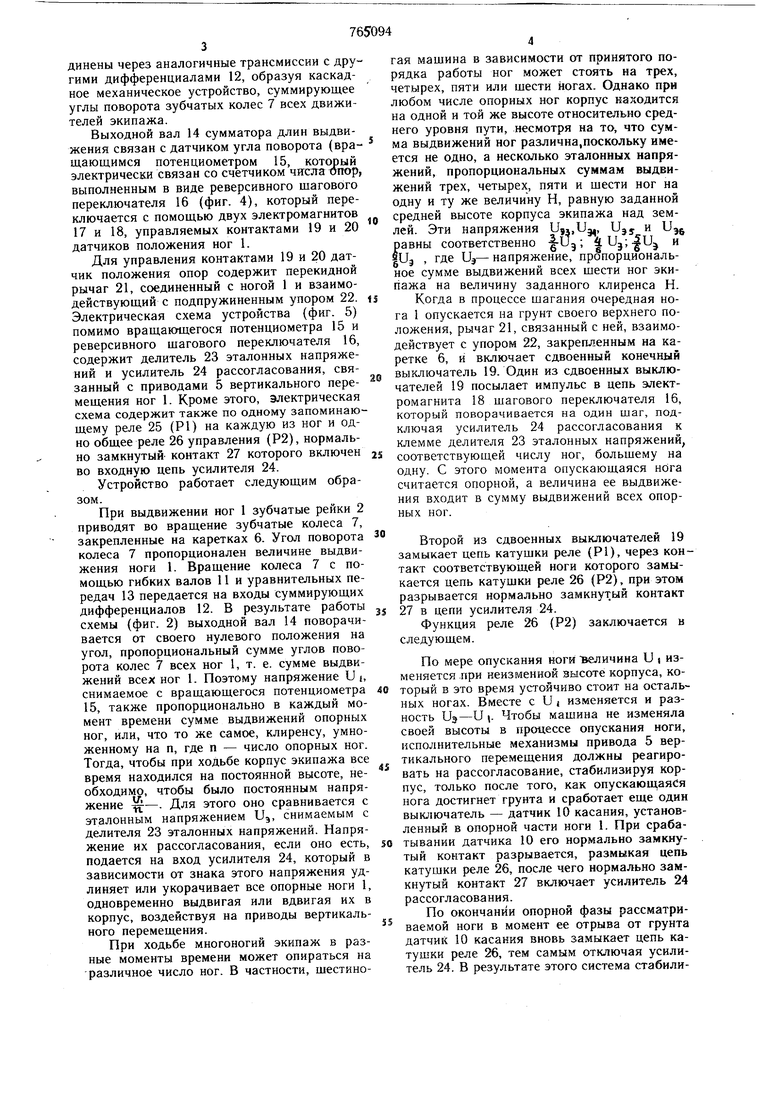
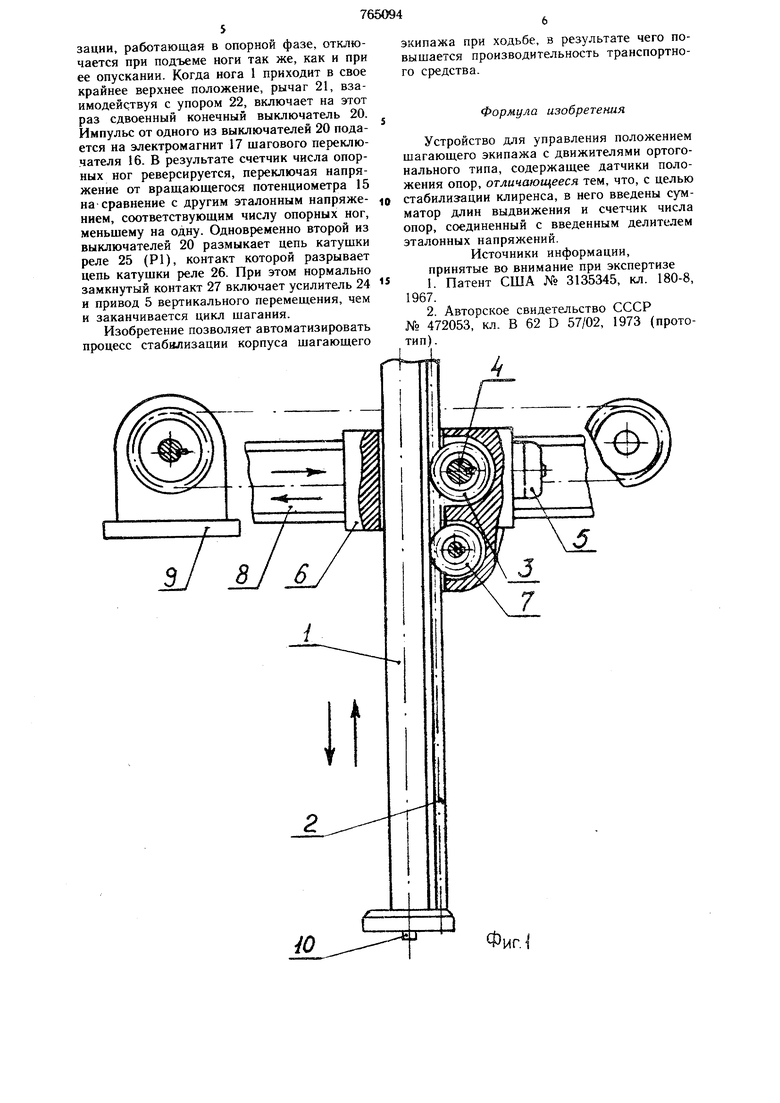
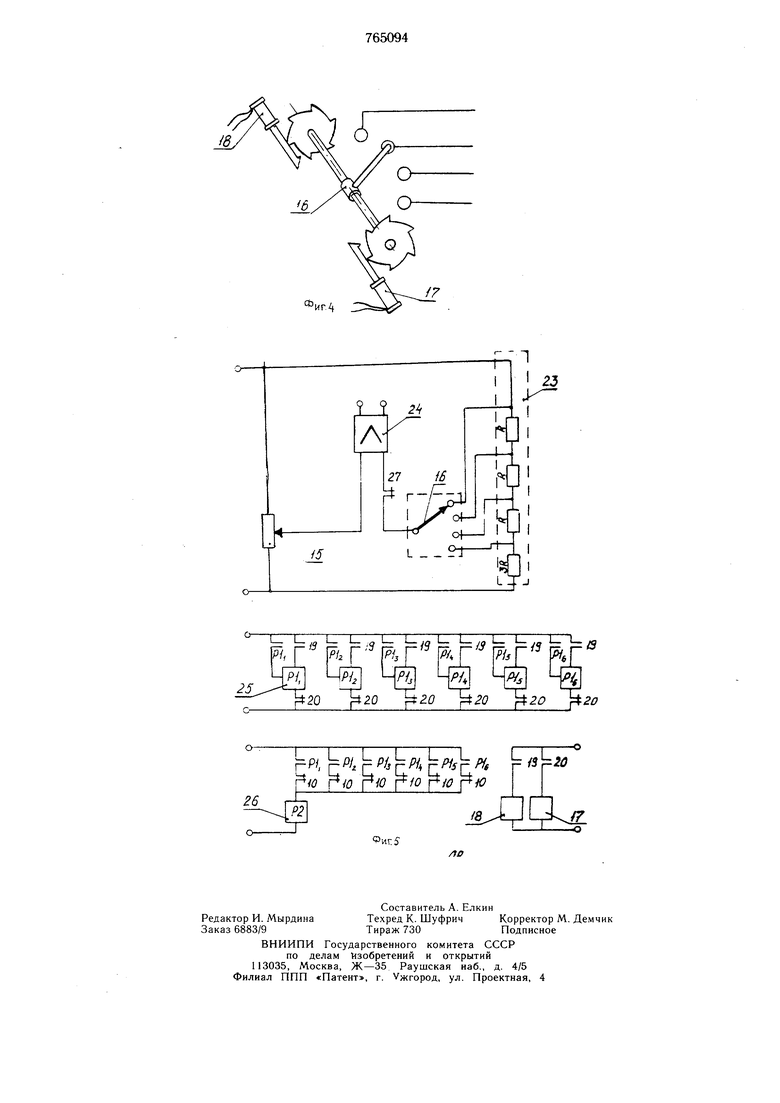
На фиг. 1 изображен шагающий движитель; на фиг. 2 - кинематическая схема сумматора; на фиг. 3 - датчик положения ноги; на фиг. 4 - счетчик числа опор; на фиг. 5 - электрическая схема устройства.
Шагающий движитель состоит из ноги 1, на которой закреплена зубчатая рейка 2, находящаяся в зацеплении с зубчатым колесом 3 вала 4 привода 5 вертикального перемещения, установленного на подвижной каретке 6, на которой установлено зубчатое колесо 7, находящееся в зацеплении с рейкой 2 и являющееся датчиком положения ноги 1. Каретка 6 опирается на горизонтальную направляющую 8, по которой она перемещается под действием привода 9 горизонтального перемещения.
В нижней части ноги 1 установлен датчик 10 касания, выполненный в виде электрического конечного переключателя. Зубчатое колесо 7 механической трансмиссией (гибким валом 11) связано со входом суммирующего дифференциала 12 через уравнительную зубчатую передачу 13. Зубчатые колеса 7 остальных движителей экипажа соединены через аналогичные трансмиссии с другими дифференциалами 12, образуя каскадное механическое устройство, суммирующее углы поворота зубчатых колес 7 всех движителей экипажа. Выходной вал 14 сумматора длин выдвижения связан с датчиком угла поворота (вращающимся потенциометром 15, который электрически связан со счетчиком числа oiro, выполненным в виде реверсивного шагового переключателя 16 (фиг. 4), который переключается с помощью двух электромагнитов 17 и 18, управляемых контактами 19 и 20 датчиков положения ног 1. Для управления контактами 19 и 20 датчик положения опор содержит перекидной рычаг 21, соединенный с ногой 1 и взаимодействующий с подпружиненным упором 22. Электрическая схема устройства (фиг. 5) помимо вращающегося потенциометра 15 и реверсивного щагового переключателя 16, содержит делитель 23 эталонных напряжений и усилитель 24 рассогласования, связанный с приводами 5 вертикального перемещения ног 1. Кроме этого, электрическая схема содержит также по одному запоминающему реле 25 (Р1) на каждую из ног и одно общее реле 26 управления (Р2), нормально замкнутый- контакт 27 которого включен во входную цепь усилителя 24. Устройство работает следующим образом. При выдвижении ног 1 зубчатые рейки 2 приводят во вращение зубчатые колеса 7, закрепленные на каретках 6. Угол поворота колеса 7 пропорционален величине выдвижения ноги 1. Вращение колеса 7 с помощью гибких валов 11 и уравнительных передач 13 передается на входы суммирующих дифференциалов 12. В результате работы схемы (фиг. 2) выходной вал 14 поворачивается от своего нулевого положения на угол, пропорциональный сумме углов поворота колес 7 всех ног 1, т. е. сумме выдвижений всех ног 1. Поэтому напряжение U i, снимаемое с вращающегося потенциометра 15, также пропорционально в каждый момент времени сумме выдвижений опорных ног, или, что то же самое, клиренсу, умноженному на п, где п - число опорных ног. Тогда, чтобы при ходьбе корпус экипажа все время находился на постоянной высоте, необходимо, чтобы было постоянным напряжение -. Для этого оно сравнивается с эталонным напряжением U,, снимаемым с делителя 23 эталонных напряжений. Напряжение их рассогласования, если оно есть, подается на вход усилителя 24, который в зависимости от знака этого напряжения удлиняет или укорачивает все опорные ноги 1, одновременно выдвигая или вдвигая их в корпус, воздействуя на приводы вертикального перемещения. При ходьбе многоногий экипаж в разные моменты времени может опираться на различное число ног. В частности, щестиногая мащина в зависимости от принятого порядка работы ног может стоять на трех, четырех, пяти или щести ногах. Однако при любом числе опорных ног корпус находится на одной и той же высоте относительно среднего уровня пути, несмотря на то, что сумма выдвижений ног различна,поскольку имеется не одно, а несколько эталонных напряжений, пропорциональных суммам выдвижений трех, четырех, пяти и щести ног на одну и ту же величину Н, равную заданной средней высоте корпуса экипажа над земиэ5„ и и, лей. Эти напряжения Ujj.Ug,, Ц;|Ц эавны соответственно jg , где Uj- напряжение, пропорциональное сумме выдвижений всех шести ног экипажа на величину заданного клиренса Н. Когда в процессе шагания очередная нога 1 опускается на грунт своего верхнего положения, рычаг 21, связанный с ней, взаимодействует с упором 22, закрепленным на каретке 6, и включает сдвоенный конечный выключатель 19. Один из сдвоенных выключателей 19 посылает импульс в цепь электромагнита 18 щагового переключателя 16, который поворачивается на один шаг, подключая усилитель 24 рассогласования к клемме делителя 23 эталонных напряжений, соответствующей числу ног, больщему на одну. С этого момента опускающаяся нога считается опорной, а величина ее выдвижения входит в сумму выдвижений всех опорных ног. Второй из сдвоенных выключателей 19 замыкает цепь катущки реле (Р1), через контакт соответствующей ноги которого замыкается цепь катущки реле 26 (Р2), при этом разрывается нормально замкнутый контакт 27 в цепи усилителя 24. Функция реле 26 (Р2) заключается в следующем. По мере опускания ноги веяичина U t изменяется .при неизменной высоте корпуса, который в это время устойчиво стоит на остальных ногах. Вместе с U j изменяется и разность Uj-и . Чтобы машина не изменяла своей высоты в процессе опускания ноги, исполнительные механизмы привода 5 вертикального перемещения должны реагировать на рассогласование, стабилизируя корпус, только после того, как опускающ аяСя нога достигнет грунта и сработает еще один выключатель - датчик 10 касания, установленный в опорной части ноги 1. При срабатывании датчика 10 его нормально замкнутый контакт разрывается, размыкая цепь катушки реле 26, после чего нормально замкнутый контакт 27 включает усилитель 24 рассогласования. По окончании опорной фазы рассматриваемой ноги в момент ее отрыва от грунта датчик 10 касания вновь замыкает цепь катушки реле 26, тем самым отключая усилитель 24. В результате этого система стабилизации, работающая в опорной фазе, отключается при подъеме ноги так же, как и при ее опускании. Когда нога 1 приходит в свое крайнее верхнее положение, рычаг 21, взаимодействуя с упором 22, включает на этот раз сдвоенный конечный выключатель 20. Импульс от одного из выключателей 20 подается на электромагнит 17 шагового переключателя 16. В результате счетчик числа опорных ног реверсируется, переключая напряжение от вращающегося потенциометра 15 на сравнение с другим эталонным напряжением, соответствующим числу опорных ног, меньшему на одну. Одновременно второй из выключателей 20 размыкает цепь катушки реле 25 (Р1), контакт которой разрывает цепь катушки реле 26. При этом нормально замкнутый контакт 27 включает усилитель 24 и привод 5 вертикального перемещения, чем и заканчивается цикл шагания. Изобретение позволяет автоматизировать процесс стабилизации корпуса шагающего экипажа при ходьбе, в результате чего повышается производительность транспортного средства. Формула изобретения Устройство для управления положением шагающего экипажа с движителями ортогонального типа, содержащее датчики положения опор, отличающееся тем, что, с целью стабилизации клиренса, в него введены сумматор длин выдвижения и счетчик числа опор, соединенный с введенным делителем эталонных напряжений. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3135345, кл. 180-8, 1967. 2.Авторское свидетельство СССР № 472053, кл. В 62 D 57/02, 1973 (прототип).
Фиг.1
22
20
.З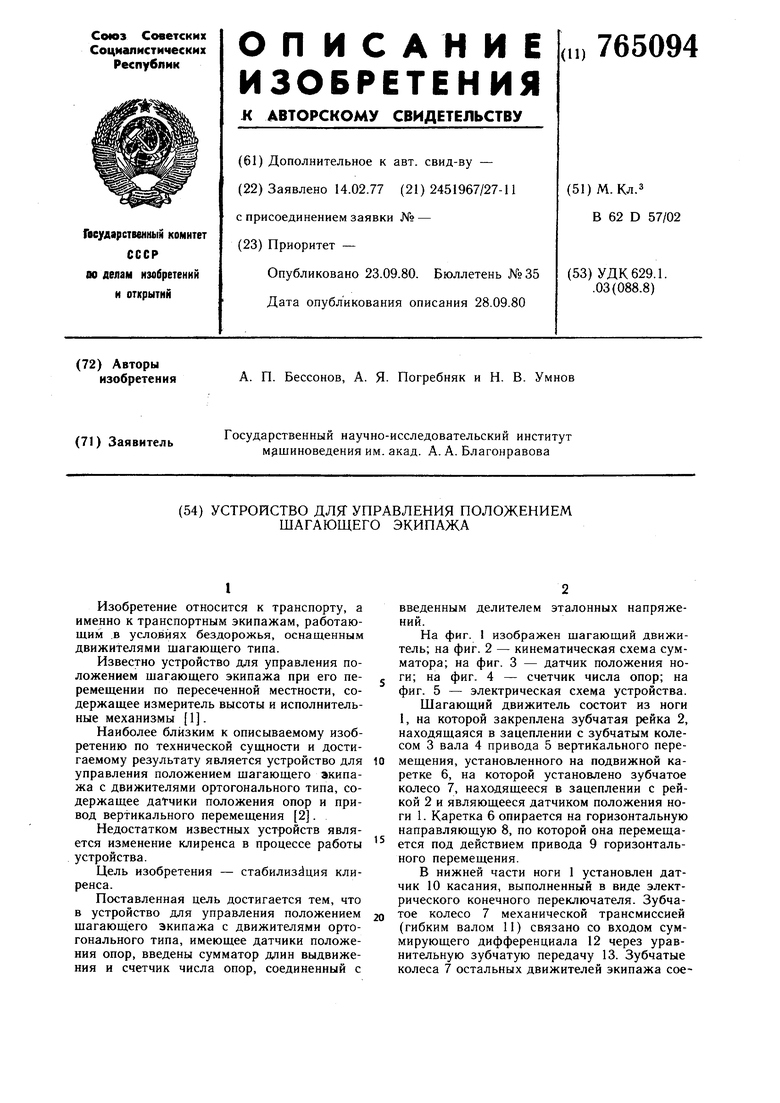
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления положением шагающего экипажа | 1980 |
|
SU880854A2 |
| Транспортное средство повышеннойпРОХОдиМОСТи | 1979 |
|
SU844452A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМИ ДВИЖИТЕЛЯМИ М.И.ЛОВЧИКОВА | 1992 |
|
RU2031040C1 |
| Колесно-шагающий движитель | 1979 |
|
SU887340A2 |
| Сигнализатор выступающих препятствий перед транспортным средством | 1972 |
|
SU439423A1 |
| Шагающий движитель | 1978 |
|
SU823212A1 |
| Колесно-шагающий движитель | 1980 |
|
SU948742A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ОПОРЫ ШАГАЮи],ЕГО ДВИЖИТЕЛЯ | 1969 |
|
SU250251A1 |
| Устройство для изготовления покрышек пневматических шин | 1974 |
|
SU540559A3 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
О
i5
гг. г- / пг, I- 5 гг. I-- ГТГу Г /J Пи I-
pj F Г pfT pJT ру: pii
чЯ1 Ч Ч 4 4
20 20 2.0 20 20 20
Lpy, Lp/ Lp/L
/ r/ r/g рл
24
4j2:
/s.
