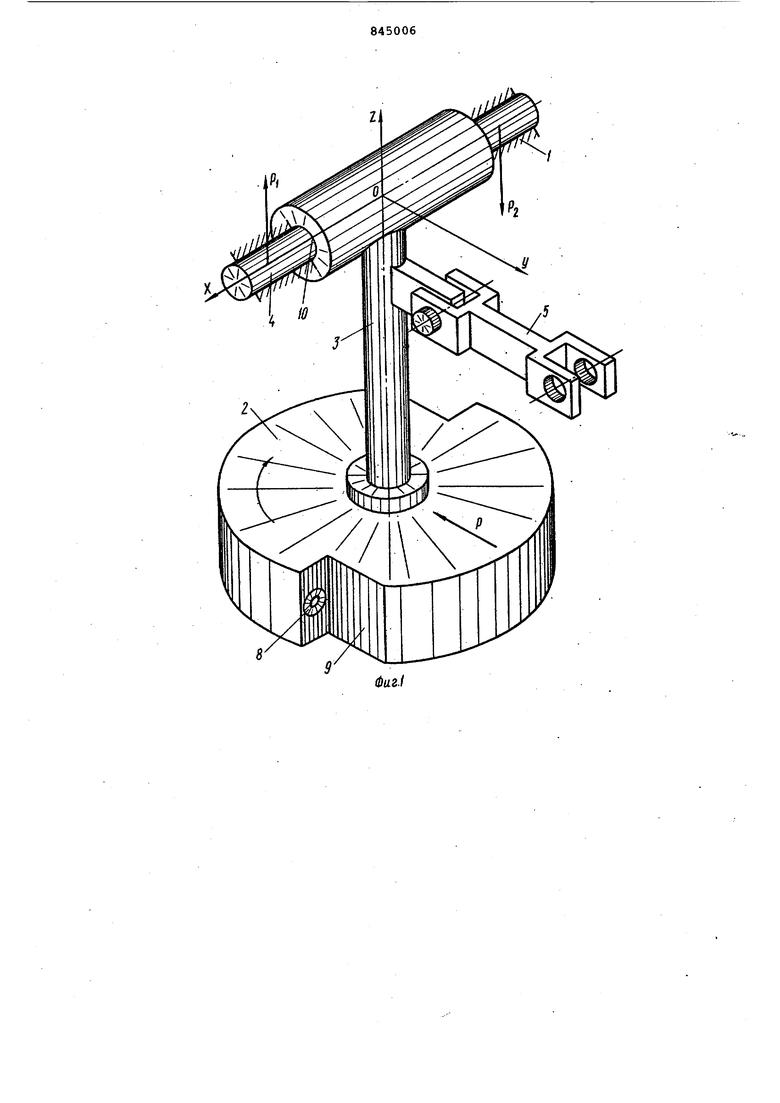
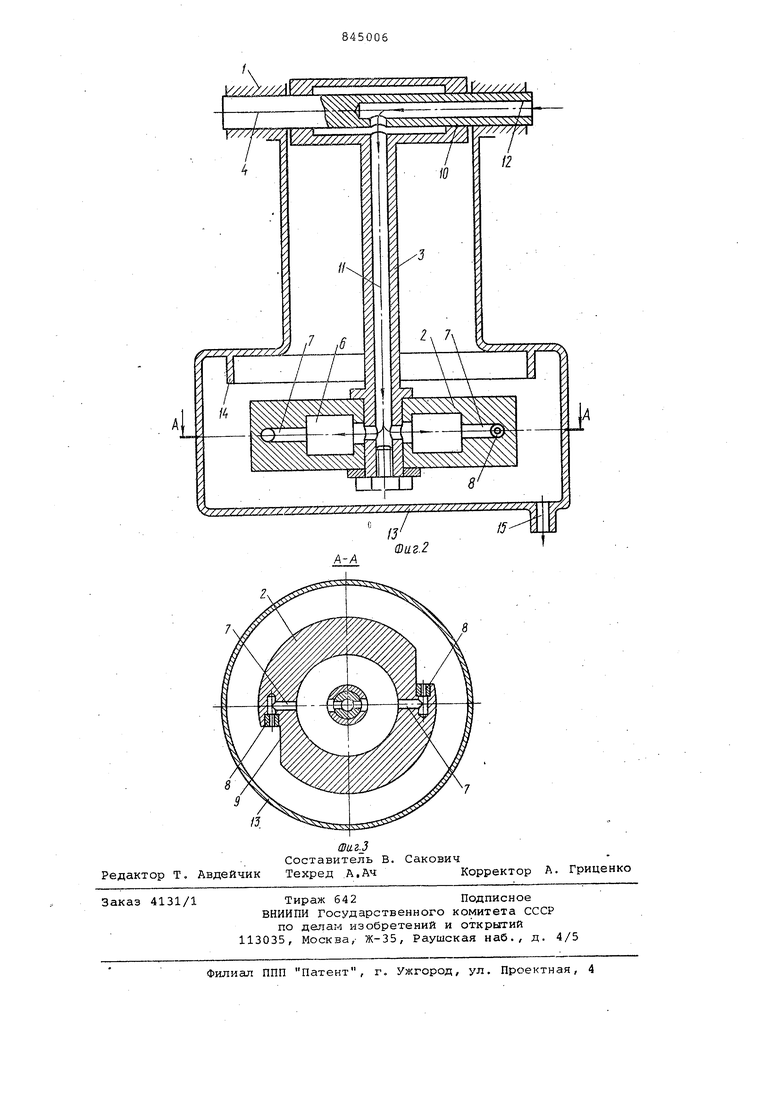
Изобретение относится к конструкции датчиков вертикального положения объекта i(i может найти применение в системах стабилизации транспортных средств. Известен датчик вертикального положения объекта, выполненный в виде закрепленного в кожухе маятника l. Недостатког известного датчика яв ляется.ёго чувстви ел1ьчость к деистВИЮ сил инщ.)ё у4||,Фй1-тЙ:;Ч.го.., возникают кЬлебания, демпфирований к торых происходит после отклоненияма ятника от вертикального положения, в результате чего датгчик с опозданием реагирует на основной сигнал. Цель изобретения - повышение быст родеиствия датчика.. ; Указанная цель достигается тем, что груз маятника выполнен в виде диска, вращаемого приводом в горизон тальной плоскости. При этом груз мо жет быть выполнен полым и снабжен противоположно направленными форсунками, а стержень снабжен маслопровод ным каналом, одним концом связанным с напорной магистралью, а другим с полостью груза. Для снижения сопротивления вращению груза,.форсунки могут быть рас ... положены в карманах диска, а кожух снабжен маолоотражателем. На фиг. 1 представлена пространственная схема предложенного маятни- К.ОВОГО датчика; на фиг. 2 - продольное сечение датчика; на фиг. 3 - сечение А-А фиг. 2. Датчик вертикального положения объекта, например склонохода, содержй -:4ш йрно. подв1 енный к остову1 склонохода маятник, состоящий из груза 2, стержня 3, оси подвеса 4 и тяги 5, соединякжцей стержень 3 маятника с усилительным или исполнительным органами выравнивающего механизма. Груз .насс1Женный на стержень. 3 с возможностью свободного вращения, выполнен в виде круглого уравновешенного диска обтекаемой формы с внутренней полостью 6 (фиг. 2) для размещения масла и маслопроводными каналами 7, оканчивающимися форсунками 8. Форсунки 8 расположены в специальных карманах 9 груза 2 (фиг.-1, 3), Стержень 3, соединенный цилиндрическим шарниром 10 с осью подвеса 4 имеет маслопроводную продольную полость 11, сообщающуюся с внутренней полостью груза 2.
Ось 4 подвеса маятника закреплена на остове 1 вдоль продольной оси склонохода и имеет внутренний маслопроводный канал 12, сообщающийся с полостью 11 стержня 3 и напорной магистралью.
Маятниковый датчик склонохода герметично закрыт защитным кожухом 13, снабженным маслоотражателем 14 (фиг. 2). В нижней части кожуха 13 находится сливной канал 15 для возвращения масла в бак (на чертеже не указан) ..
Датчик работает следующим образом.
От гидросистемы склонохода или от специального насоса масло под давлением поступает в маслопроводный канал 12 оси 4 (фиг. 2), из которого через продольную полость 11 стержня
3направляется во внутреннюю полость 6 груза 2. После заполнения внутренней полости 6 масло попадает в маслопроводные каналы 7, а затем - к форсункам 8 и выбрасывается из них
с большой скоростью в противоположных нап| авлениях. Создаваемый при этом реактивный момент вращает груз 2 с большим числом оборотов. Струи масла, вытекакщие из форсунок 8, ударяются о стенку защитного кожуха 13, При этом маслоотражатель 14 направляет основную часть масла в нижнюю часть кожуна: 13. Для уменьшения торможения груз 2 выполнен в обтекаемой форме, а форсунки 8 располагаютс в специальных карманах 9 (фиг. 1, 3) Масло, вытекающее из форсунок 8 через канал 15, сливается в бак гидросистемы.
Вращающийся груз 2 вместе со стернем 3 маятника образует гироскопическую систему с двумя степенями свободы, так как его положение определяется двумя независимыми параметрами: углом поборота вокруг оси стержня 3 маятника и углом поворота стержня 3 вокруг оси 4 подвеса маятника.
При быстром вращении груза 2, соПровождакхдемся изменением положения стержня 3, т. е оси вращения груза 2, появляется гироскопический эффект который заключается в том,.что при действии силы Р на ось вращения груз 2 стремится к перемещению в плоскости , перпендикулярной направлению приложе ния силы Р.
При отклонении маятникового датчика под воз действием ускорений, возникающих во время крена остова движущегося склонохода, стержень 3 маятника в течение времени изменяет свое положение. В результате на ось
4подвеса маятника действует периодически изменяющаяся по величине и направлению гироскопическая пара (Р ; РЭ), способствующая уменьшению величины отклонения стержня маятника (фиг. 1). Таким образом, при гироскопическом эффекте получается силовая стабилизация Вертикального положения маятника. Стержень 3 маятника находится в равновесии и не колеблется под воздействием тангенциальной силы инерции.
При работе на косогоре остов 1 склонохода отклоняется от вертикального положения, а стержень 3 маятника стабильно сохраняет свое вертикальное положение. Изменение положения остова 1 относительно стержня 3 маятника являкщееся сигналом крена остова склонохода, через хягу 5 передается на усилительные или исполнительные органы выравнивающего устройства до тех пор, пока остов склонохода не займет вертикальное положение.
Таким образом, в -предлагаемом датчике вертикального положения входным импульсом является только профиль дороги, чем обеспечивается безопасное передвижение склонохода при максимально возможных скоростях с минимальным временем срабатывания ис-: полнительных органов выравнивающего устройства.
Формула изобретения
1.Датчик вертикального положения объекта, выполненный в виде закрепленного в кожухе маятника, отличающийся тем, что, с целью повышения,быстродействия датчика, груз маятника выполнен в виде диска, вращаемого приводом в горизонтгщьной плоскости.
2.Датчик по п. 1, отличающийся тем, что груз выполнен полым и снабжен противоположно направленными форсунка1ми, а стержень снабжен маслопроводным каналом, одним концом связанным с напорной магистралью, а другим - с полостью груза.
3.Датчик по пп. 1 и 2, отличающийся тем, что, с целью уменьшения сопротивления вращению груза, -форсунки расположены в карманах диска, а кожух снабжен маслоотражателем.
Источники информации, принятые во внимание при экспертизе
1. П. А. Амельченко и др. Колесные тракторы для работы на склонах. М., Машиностроение, 1978, с. 171, рис. 111.
Фиг.)

| название | год | авторы | номер документа |
|---|---|---|---|
| Маятниковый датчик крена стабилизатора склонохода | 1972 |
|
SU554177A1 |
| Устройство для выравнивания остова склонохода | 1971 |
|
SU450729A1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1932 |
|
SU38555A1 |
| ДАТЧИК НАКЛОНА МАЯТНИКОВОГО ТИПА ДЛЯ ВЫРАВНИВАЮЩИХ МЕХАНИЗМОВ КОСОГОРНЫХ МАШИН | 1970 |
|
SU286519A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| Устройство для выравнивания остова склонохода | 1979 |
|
SU783059A1 |
| УЧЕБНЫЙ ПРИБОР ПО ФИЗИКЕ | 1991 |
|
RU2017228C1 |
| Устройство для стабилизации вертикального положения горного самохода при движении его по горным склонам | 1957 |
|
SU113712A2 |
| АНТЕННАЯ СИСТЕМА СО СТАБИЛИЗИРОВАННОЙ ПЛОСКОСТЬЮ ВРАЩЕНИЯ ОБЗОРНОГО КОРАБЕЛЬНОГО РАДИОЛОКАТОРА | 2005 |
|
RU2301482C2 |
| Маятниковый датчик крена стабилизатора склонохода | 1989 |
|
SU1611760A1 |